



 下载:
下载:





-
近年来,为应对能源危机和气候变化等问题电动汽车(Electric Vehicle,EV)行业发展迅速[1]。由直流变换器组成的电动汽车直流充电站(EV DC ChargingStation,EVCS)将成为智能电网的必要要素[2-3]。EVCS的不稳定风险将成为制约EV部署的主要因素,从学术和工程应用的角度都值得进一步研究[4]。
在电压环带宽内表现为负阻抗的恒定功率负载(Constant Power Load,CPL)具有不稳定效应,是降低交互稳定性的一个主要因素[5-6]。此外,电力电子变换器的低惯量特性和控制回路之间的交互作用也可能导致直流母线电压的剧烈波动[7],降低EVCS的效率并对EV电池造成危害[8-9]。尽管已提出虚拟惯性和阻尼控制(Virtual Inertia and Damping Control,VIDC)以抑制电压变化率(Rate of Change of Voltage,RoCoV)[7, 10],但VIDC内部的环路交互仍然会引发低频振荡,在VIDC和CPL之间的动态相互作用以及CPL的负阻尼特性的影响,会加剧EVCS内部的低频振荡(Low-Frequency Oscillation,LFO)[11-12]。为了确保更好地动态响应,需要借助不同的分析工具对系统的动态性能进行分析以指导参数设计,如阶跃响应和阻抗模型[10, 13]。
基于阻抗的方法被广泛用于研究振荡机制,因为阻抗模型具有明确的物理意义、可直接测量等优势[14-15]。在文献[14]中,阻抗模型揭示了负载侧虚拟同步机的低频负电阻会引起不稳定,并提出一个五维阻抗稳定性准则来研究虚拟同步机之间的相互作用并评估系统稳定性[15]。然而,现有的阻抗模型缺乏对欠阻尼或失稳因素的内部根源进行系统和直观的辨识,本质仍是一个黑箱模型[10]。难以直观地理解每个控制回路(特别是虚拟惯性回路)的阻抗特性以阐明低频振荡机理,无法确定潜在的不稳定因素[16]。
针对上述EVCS低频振荡分析缺乏合适建模工具的问题,结合阻抗模型和状态空间模型的优点,提出了一种多时间尺度低阶阻抗电路模型,作为白箱模型和黑箱模型之间的桥梁。首先,文章对环路虚拟阻抗进行了详细分析,直观揭示了各个控制环路阻抗高阶属性的根本原因。随后,通过伯德图近似提出控制环路闭环增益的降阶拟合方法,建立多时间尺度低阶阻抗电路模型。最后,通过Matlab/Simulation仿真结果验证了所提出的多时间尺度低阶阻抗模型的正确性。
-
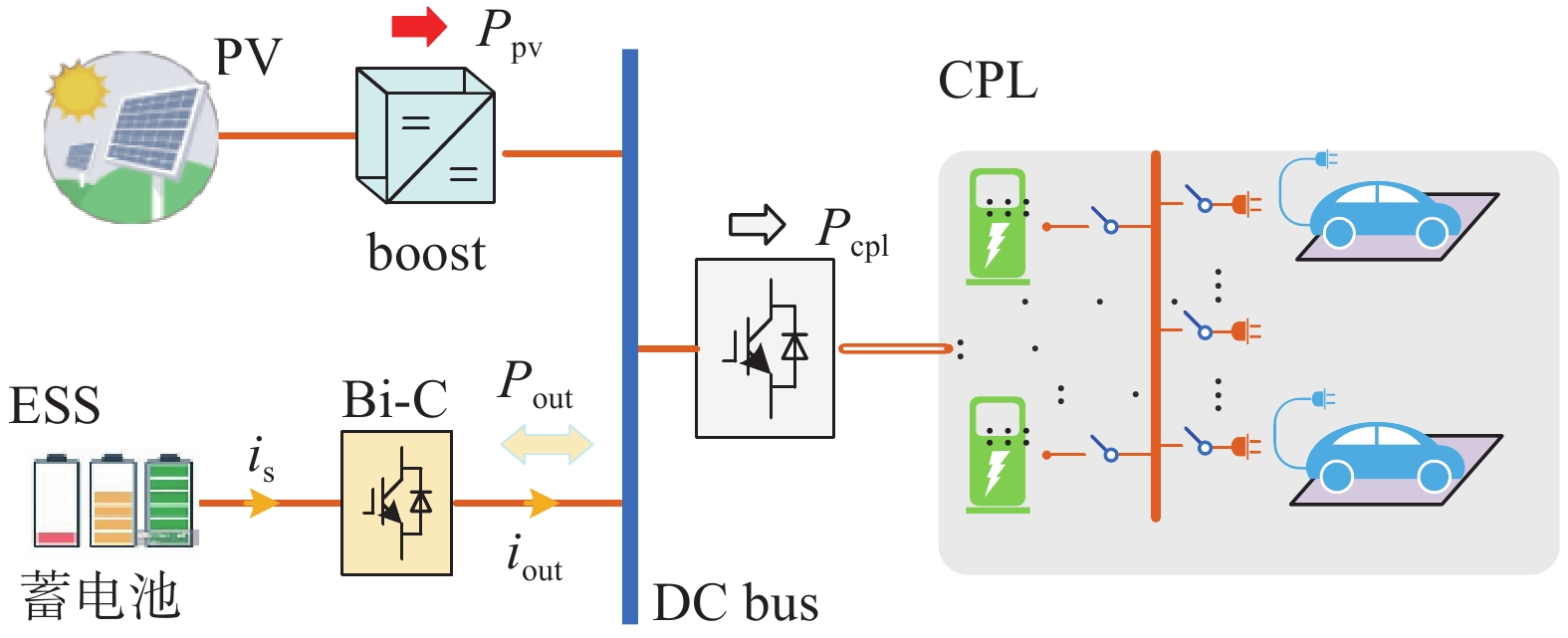
孤岛电动汽车直流充电站(Electric Vehicle DC Charging Station,EVCS)的典型结构如图1[17-18]所示。主要包括3种不同类型的组件,即光伏(Photovoltaic,PV)单元、储能系统(Energy Storage System,ESS)和恒功率负载CPL。PV通过boost变换器连接到EVCS,Ppv是其发电功率。CPL通过buck变换器连接到EVCS,Pcpl是指其消耗的功率。ESS由电池组成[19-20],采用双向直流变换器(Bidirectional DC Converter,Bi-C)进行充电和放电[5]。Pout是ESS的输出功率,其正负值分别代表放电/充电模式。buck和boost变换器的电路结构和参数可从文献[5]中获得。

图 1 电动汽车直流充电站拓扑
Figure 1. Topology of the studied EVCS
各个子系统通过电力电子变换器连接到直流母线,系统表现出低惯量和弱阻尼特征[21-22]。当EVCS受到PV或CPL的功率波动时,直流电压会振荡甚至失稳[23]。因此,提出了虚拟惯量和阻尼控制VIDC以充分利用ESS的惯量支持能力提高系统动态稳定性,降低RoCoV[21-22]。
-
已提出的VIDC包括下垂控制、虚拟惯量环路和双环控制。图2描述了Bi-C的电路和VIDC的结构。vin和is是输入电压和电流,vout和iout是输出电压和电流。Ls和Rs是滤波电感器及其寄生电阻,Cout是输出滤波电容。vdcn=300 V,是直流母线电压额定值。Gv(s)=kvp+kvi/s和Gi(s)=kip+kii/s是电压和电流环路控制器,其中kvp是电压环比例参数,kvi是电压环积分参数,kip是电流环比例参数,kii是电流环积分参数。惯性控制方程如式(1)~式(5)所示。Rd是下垂系数。Gpwm=1/300,是调制增益。d是占空比,vref是电压环路参考。Jvir和kvd是惯性系数和阻尼系数,以增大等效直流电容并改善耗散特性。此外,提出了二次电压恢复回路,如式(4)所示,ksvr是刚度系数,以提高系统刚度并消除由Rd引起的稳态电压误差。Bi-C的小信号模型如式(5)所示。D为占空比d的稳态值。电流环、电压环和惯量环的带宽分别为ωc=1160 rad/s,ωv =167 rad/s,ωiner≈10 rad/s。控制和电路参数见参考文献[5]。

图 2 双向直流变换器电路及虚拟惯量和阻尼控制策略
Figure 2. The circuit of Bi-C and its VIDC strategy
$$\tag{1} \dfrac{{({{v}_{{\rm{dcn}}}} - {{v}_{{\rm{out}}}})}}{{{{R}_{{\rm{d}}}}}} - {{i}_{{\rm{out}}}} - {{i}_{{\rm{vd}}}} - {{i}_{{\rm{svr}}}} = {{J}_{{\rm{vir}}}}\dfrac{{{{\rm{d}}} ({{v}_{{\rm{ref}}}} - {{v}_{{\rm{dcn}}}})}}{{{{\rm{d}}} t}} $$ $$\tag{2} {\text{ }}{\rm{阻尼分量}}:{\text{ }}{{i}_{{\rm{vd}}}} = {{k}_{{\rm{vd}}}}({{{v}}_{{\rm{ref}}}} - {{v}_{{\rm{dcn}}}}) $$ $$ \tag{3}{\text{ }}{\rm{惯性分量}}:{{i}_{{\rm{iner}}}} = {{J}_{{\rm{vir}}}}\dfrac{{{{\rm{d}}} ({{v}_{{\rm{ref}}}} - {{v}_{{\rm{dcn}}}})}}{{{{\rm{d}}} t}} $$ $$\tag{4} {\text{ }}{\rm{刚度分量}}:{{i}_{{\rm{svr}}}} = {{k}_{{\rm{svr}}}}\int {({{v}_{{\rm{ref}}}} - {{v}_{{\rm{dcn}}}})} {{\rm{d}}} t $$ $$\tag{5} {{G}_{{\rm{id}}}}({s}) = \dfrac{{{{C}_{{\rm{out}}}}{{v}_{{\rm{dcn}}}}{s} + (1 - D){{I}_{\rm{s}}}}}{{{{L}_s}{{C}_{{\rm{out}}}}{{s}^2} + {{R}_{{\rm{s}}}}{{C}_{{\rm{out}}}}{s} + {{(1 - D)}^2}}} $$ -
如图3所示,由多个环路虚拟阻抗(Loop Virtual Impedance,LVI)组成的多时间尺度阻抗模型可用于LFO和稳定性分析。PV的数学模型是电流源ipv,CPL由与负增量阻抗Rcpl=−V2out/Pcpl并联的电流源Icpl=Pcpl/Vout表示,Icpl和Vout是其稳态电流和电压。Rcpl支路被调整到“源”端。“源”端的输出电流被重新定义为:iout=iload=Icpl−ipv。Zvcl(s)是电压环虚拟阻抗,而Zvir(s)则是惯量环虚拟阻抗。在下垂控制时间尺度内,Yvd是惯量环产生的导纳,Ycpl表示下垂控制和CPL之间的相互作用,Ydroop是下垂控制虚拟导纳。详细表达式可以推导为式(6)~式(8)。

图 3 直流充电站的多时间尺度阻抗电路模型
Figure 3. The multi-timescale impedance circuit model of EVCS.
$$\tag{6} {{Z}_{{{\rm{vcl}}} }}(s) = \dfrac{1}{{\mu {{k}_{{\rm{vp}}}}{{G}_{{\rm{icl}}}}(s) + \dfrac{{\mu {{k}_{{\rm{vi}}}}{{G}_{{\rm{icl}}}}(s)}}{s} + {{C}_{{\rm{out}}}}s}}||{{R}_{{\rm{cpl}}}} $$ $$\tag{7} {{Z}_{{{\rm{vir}}} }}(s) = \dfrac{1}{{\dfrac{{s{{J}_{{\rm{vir}}}}}}{{{{G}_{{{\rm{vcl}}} }}(s)}} + \dfrac{{{{k}_{{\rm{vd}}}}}}{{{{G}_{{{\rm{vcl}}} }}(s)}} + \dfrac{{{{k}_{{\rm{svr}}}}}}{{{s}{{G}_{{{\rm{vcl}}} }}(s)}}}} = {{H}_{{{\rm{vir}}} }}(s){{G}_{{{\rm{vcl}}} }}(s) $$ $$\tag{8} \begin{split} &{{Y}_{{{\rm{vd}}} }}(s) = - {{k}_{{\rm{vd}}}}{{G}_{{{\rm{vir}}} }}(s),{{Y}_{{\rm{cpl}}}}(s) = {{{{G}_{{{\rm{vir}}} }}(s)}/{{{R}_{{\rm{cpl}}}}}},\\&{{Y}_{{\rm{droop}}}}(s) = {{{{G}_{{{\rm{vir}}} }}(s)}/{{{R}_{\rm{d}}}}} \end{split} $$ 式中:
Gicl(s) ——电流环闭环增益;
Gvcl(s) ——电压环闭环增益;
Gvir(s) ——惯量环闭环增益。
其详细表达式可见文献[10]。从图3中可以看出,总系统阻抗Zsum(s)可以用式(9)表示,Yv(s)是电压正向通道的传递函数,具有导纳的性质,如式(10)所示。
$$\tag{9} {Z_{{{\rm{sum}}} }}({s}) = 1/{({Y_{{\rm{cpl}}}} + {Y_{{\rm{vd}}}} + {Y_{{\rm{droop}}}})}||({Z_{{\rm{vir}}}}({s}) + {Z_{{\rm{vcl}}}}({s})) $$ $$\tag{10} {Y_{\rm{v}}} = (1 + {{H}_1})\left( {\dfrac{1}{{{R_{\rm{d}}}}} - {k_{{\rm{vd}}}} + {R_{{\rm{cpl}}}}} \right){{G}_{{\rm{vir}}}} $$ $$\tag{11} {{H}_1} = \dfrac{1}{{\left(\dfrac{1}{{{R_{\rm{d}}}}} - {k_{{\rm{vd}}}} + {R_{{\rm{cpl}}}}\right){{H}_{{\rm{vir}}}}}} + \dfrac{1}{{\mu {R_{{\rm{cpl}}}}\left(\dfrac{1}{{{R_{\rm{d}}}}} - {k_{{\rm{vd}}}} + {R_{{\rm{cpl}}}}\right){{H}_{{\rm{vir}}}}{{G}_{\rm{v}}}{{G}_{{\rm{icl}}}}}} $$ 多时间尺度阻抗模型反映了控制环路的阻抗重塑效应。LFO机理可通过不同时间尺度的LC交互作用和不同时间尺度之间的动态耦合阐明。电压环时间尺度内,积分环节与输出电容之间的交互会产生电压环时间尺度内的低频振荡,而惯量参数和刚性参数之间的交互作用会引发惯量环时间尺度内的低频振荡。应该注意的是,由于受到控制环路闭环增益的约束,每个LVI和Zsum都是高阶函数。LFO现象和参数的物理意义只能借助阻抗电路图和数值结果来讨论或识别。在多时间尺度阻抗模型的基础上,文章将设计一个通用的低阶RLC阻抗模型来拟合高阶LVI,利用该模型可以很容易地求解阻尼控制策略的解析表达式,更便于实际工程应用。
-
根据式(6)~式(8)可知,电压环虚拟阻抗Zvcl(s)、惯量环虚拟阻抗Zvir(s)和下垂控制环虚拟导纳Yvd、Ycpl、Ydroop分别受到电流环闭环增益Gicl(s)、电压环闭环增益Gvcl(s)和惯量环闭环增益Gvir(s)的约束。这也是环路阻尼阻抗和导纳呈现高阶属性的根本原因。注意,由于电流环控制带宽最大,所以Gicl(s)可以在整个控制带宽内等效为单位环路增益,因此Zvcl(s)可在控制带宽内简化为二阶RLC并联电路。电压环闭环增益Gvcl(s)和惯量环闭环增益Gvir(s)则不能直接简化为单位环路增益,依然是高阶传递函数。惯量环虚拟阻抗Zvir(s)是受Gvcl(s)约束的广义RLC并联电路,下垂控制环虚拟导纳Yvd、Ycpl、Ydroop是受Gvir(s)约束的虚拟导纳。这为求解阻尼控制策略的解析解带来了额外的困难。因此,本节主要讨论Gvcl(s)和Gvir(s)的降阶方法。
-
根据式(7)可知,惯量环虚拟阻抗是一个高阶传递函数,其高阶属性源自电压环传递函数Gvcl(s),因此只需对Gvcl(s)进行降阶拟合便可以获得惯量环低阶虚拟阻抗。如图4所示,可以根据Gvcl(s)的伯德图对其进行降阶拟合,求得一个详细的解析表达式,具体流程如下:

图 4 电压环闭环增益bode图近似曲线求解
Figure 4. Approximate curve of closed voltage-loop gain bode diagram
1)根据伯德图形状判断其本质上可以用一个二阶环节近似,如式(12)所示。在相位响应穿越−90°处确定ωv=26.4 rad/s。
2)带宽Ⅰ内,幅值响应斜率为−20 dB/dec且相位响应趋向−90°,说明存在一个超前环节,如式(13)所示。在相位曲线第二次穿越−135°时确定超前环节转折频率ωv1=252 rad/s。
3)带宽Ⅱ内,幅值响应斜率为−40 dB/dec且相位曲线逐渐向−180°靠近,说明存在一个滞后环节,如式(14)所示。在相位曲线第三次穿越−135°时确定滞后环节转折频率ωv2=3e5 rad/s。
4)最后通过谐振峰值确定阻尼参数ξv=0.011。最终得到Gvcl(s)的近似解析式Gvcl_app(s),如式(15)所示。其bode图如图4所示,基本与Gvcl(s)重合。
$$\tag{12} {G_1}(s) = \dfrac{{\omega _{\rm{v}}^2}}{{{s^2} + {\xi _{{\rm{v}}} }{\omega _{{\rm{v}}} }s + \omega _{\rm{v}}^2}} $$ $$\tag{13} {G_{1\_{\rm{lead}}}}(s) = \dfrac{{s + {\omega _{{{\rm{v}}} 1}}}}{{{\omega _{{{\rm{v}}} 1}}}} $$ $$\tag{14} {G_{1\_{\rm{lag}}}}(s) = \dfrac{{{\omega _{{{\rm{v}}} 2}}}}{{s + {\omega _{{{\rm{v}}} 2}}}} $$ $$\tag{15} {G}_{{\rm{vcl}}\_\rm{app}}(s)=\dfrac{3{\rm{e}}5}{252}\times \dfrac{{26.4}^{2}}{{s}^{2}+0.011\times 26.4 s+{26.4}^{2}}\times \dfrac{s+252}{s+3{\rm{e}}5} $$ -
根据式(7)可知,下垂控制环虚拟导纳Yvd、Ycpl、Ydroop是高阶传递函数,其高阶属性源自惯量环传递函数Gvir(s),因此只需对Gvir(s)进行降阶等效便可得到下垂控制环低阶虚拟导纳。通过图5对Gvir(s)伯德图降阶拟合得到详细的解析表达式,流程如下:

图 5 惯量环闭环增益bode图近似曲线求解
Figure 5. Approximate curve of closed inertia-loop gain bode diagram
1)根据伯德图形状判断其本质上可以用一个无谐振峰的二阶环节近似,如式(16)所示。因此在−3 dB处确定ωvir=1.1 rad/s。
2)带宽Ⅰ内,幅值响应斜率为−20 dB/dec说明存在一个超前环节且其转折频率在ωvir之前,如式(17)所示。在相位曲线穿越30°时确定ωvir1=0.64 rad/s。
3)带宽Ⅱ内,幅值响应斜率为−40 dB/dec且相位曲线逐渐向−180°靠近,说明存在一个滞后环节,如式(18)所示。在相位曲线穿越−135°时确定滞后环节转折频率ωvir2=3e5 rad/s。
4)如图5所示,ksvr导致稳态幅值响应偏差,因此引入偏差系数Gvir0=0.527进行幅值响应校正。最后通过谐振峰值确定阻尼参数ξvir=2.5。得到Gvir(s)的近似解析式Gvir_app(s),如式(19)所示。其bode图如图5所示,基本与Gvir(s)重合。
$$\tag{16} {G_2}(s) = \dfrac{{\omega _{{\rm{vir}}}^2}}{{{s^2} + {\xi _{{{\rm{vir}}} }}{\omega _{{{\rm{vir}}} }}s + \omega _{{\rm{vir}}}^2}} $$ $$\tag{17} {G_{2\_{\rm{lead}}}}(s) = \dfrac{{s + {\omega _{{{\rm{vir}}} 1}}}}{{{\omega _{{{\rm{vir}}} 1}}}} $$ $$\tag{18} {G_{2\_{\rm{lag}}}}(s) = \dfrac{{{\omega _{{{\rm{vir}}} 2}}}}{{s + {\omega _{{{\rm{vir}}} 2}}}} $$ $$\tag{19} {G}_{\rm{vir}\_\rm{app}}(s)=0.527\times \frac{3{\rm{e}}5}{0.64}\frac{{1.1}^{2}}{{s}^{2}+2.5\times 1.1 s+{1.1}^{2}}\times\frac{s+0.64}{s+3{\rm{e}}5} $$ 通过bode图设计的低阶阻抗解析式可以为求解阻尼控制策略的解析表达式提供便利。
-
基于图1和图2中系统拓扑和控制结构,在MATLAB中建立电动汽车直流充电站的开关模型(Switching Model,SM)仿真,并在以下工况运行:恒功率负载增加1 kW。同时获得同等条件下相应阻抗模型(Impedance Model,IM)的阶跃响应。在双环控制下验证了电压环阻抗模型,在虚拟惯量和阻尼控制下验证了惯量环阻抗模型。系统参数与控制参数见文献[10]。开关模型和阻抗模型的阶跃响应如图6和图7所示。SM结果与IM结果基本一致。此外,各参数的控制效果也与基于多时间尺度阻抗模型的分析一致。

图 6 电压环阻抗模型验证
Figure 6. Verification of voltage-loop impedance model

图 7 惯量环阻抗模型验证
Figure 7. Verification of inertia-loop impedance model
双环控制下的仿真结果如图6所示,在t=4 s时,负荷增加1 kW。kvp和kvi在电压环时间尺度上影响电压超调和调整时间。增大kvi可将电压恢复时间由0.7 s缩至0.3 s。增大kvp后电压波动幅值由22 V减小至10 V。
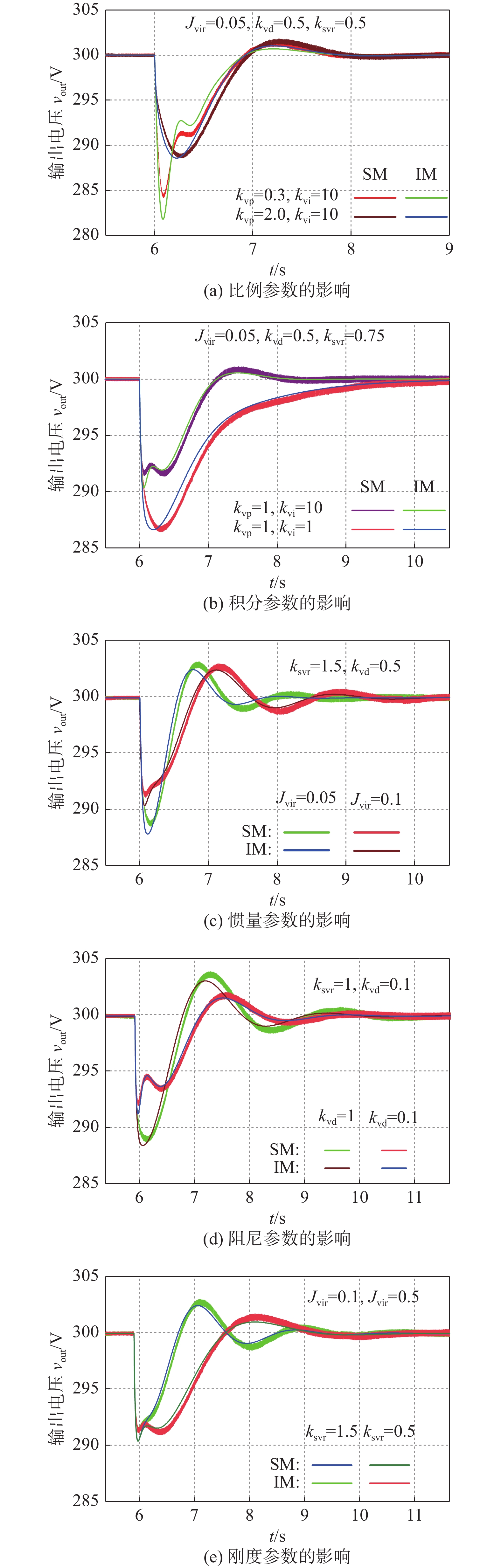
虚拟惯量和阻尼控制下的仿真结果如图7所示,在t=4 s时,负荷增加1 kW。Jvir、ksvr和kvd确定了惯量环时间尺度上的振荡频率和振幅,代表了系统的惯性、刚度和耗散特性。从图7(a)和图7(b)中可知,kvp和kvi在电压环时间尺度上影响电压超调和调整时间,与图6中的结果一致。增大Jvir主要通过降低振荡频率和幅值,减小电压变化率。由于kvd在下垂环节的负阻尼效应,增大kvd反而增大了波动幅值(12 V降低至7.5 V)。ksvr则通过与Jvir的交互影响振荡频率和电压恢复时间。以上结果验证了多时间尺度阻抗模型及其低阶模型的正确性。
-
为克服现有多时间尺度阻抗模型高阶传递函数属性在求解阻尼控制策略解析表达式时带来的不便。文章首先对环路虚拟阻抗进行了详细的阻抗分析,直观地揭示了每个控制环路阻抗高阶属性的根本原因。随后,通过伯德图近似提出了控制环路闭环增益的降阶拟合方法,建立了低阶阻抗电路模型。最后,通过Matlab/Simulation仿真结果验证了所提出的多时间尺度低阶阻抗电路模型的有效性。
Reduced RLC Impedance Circuit Model of Electric Vehicle DC Charging Station
-
摘要:
目的 虚拟惯性阻尼控制(Virtual Inertia and Damping Control,VIDC)潜在的正反馈可能加剧控制环路内部的相互作用进而引起母线电压低频振荡,破坏电动汽车直流充电站(Electric Vehicle DC Charging Station, EVCS)的稳定性。虽然已有多时间尺度阻抗模型解释VIDC的稳定机制和VIDC控制下EVCS的低频振荡机理,但其本质上是一个高阶传递函数,获取阻尼控制策略的解析表达式。 方法 针对这一问题,文章对环路虚拟阻抗进行了详细的阻抗分析,直观地揭示了每个控制环路阻抗高阶属性的根本原因。 结果 通过伯德图近似提出了控制环路闭环增益的降阶拟合方法,建立了低阶阻抗电路模型。 结论 通过Matlab/Simulation仿真结果验证了所提出的多时间尺度低阶阻抗电路模型的有效性。 Abstract:Introduction The potential positive feedback of virtual inertia and damping control (VIDC) may exacerbate the interaction within the control loop, causing low-frequency oscillation of bus voltage and disrupting the stability of electric vehicle DC charging station (EVCS). Although the existing multi-timescale impedance model explains the stability mechanism of VIDC and the low-frequency oscillation mechanism of VIDC-controlled-EVCS, it is essentially a high-order transfer function, making it difficult to obtain analytical expressions for damping control strategies. Method Therefore, a detailed impedance analysis of the virtual impedance of the loop was conducted to intuitively reveal the fundamental reasons for the higher-order properties of each loop impedance. Result A closed-loop gain fitting method for the control loop was proposed through Bode diagram approximation, and a low-order impedance circuit model was established. Conclusion The effectiveness of the proposed multi-timescale impedance model is verified through Matlab/Simulation. -
图 4 电压环闭环增益bode图近似曲线求解
Fig. 4 Approximate curve of closed voltage-loop gain bode diagram
图 5 惯量环闭环增益bode图近似曲线求解
Fig. 5 Approximate curve of closed inertia-loop gain bode diagram
-
[1] HE P W, KHALIGH A. Comprehensive analyses and comparison of 1 kW isolated DC–DC converters for bidirectional EV charging systems [J]. IEEE transactions on transportation electrification, 2017, 3(1): 147-156. DOI: 10.1109/TTE.2016.2630927. [2] DU W J, FU Q, WANG H F. Small-signal stability of a DC network planned for electric vehicle charging [J]. IEEE transactions on smart grid, 2020, 11(5): 3748-3762. DOI: 10.1109/TSG.2020.2982431. [3] REHMAN W U, KIMBALL J W, BO R. Multi-layered energy management framework for extreme fast charging stations considering demand charges, battery degradation, and forecast uncertainties [J]. IEEE transactions on transportation electrification, 2023. DOI: 10.1109/TTE.2023.3275110. [4] FU Q, DU W J, WANG H F. Planning of the DC system considering restrictions on the small-signal stability of EV charging stations and comparison between series and parallel connections [J]. IEEE transactions on vehicular technology, 2020, 69(10): 10724-10735. DOI: 10.1109/TVT.2020.3006480. [5] LIU Z J, SU M, SUN Y, et al. Existence and stability of equilibrium of DC microgrid with constant power loads [J]. IEEE transactions on power systems, 2018, 33(6): 6999-7010. DOI: 10.1109/TPWRS.2018.2849974. [6] LIN G, LIU J Y, REHTANZ C, et al. Inertia droop control and stability mechanism analysis of energy storage systems for DC-Busbar electric vehicle charging station [J]. IEEE transactions on transportation electrification, 2023, 9(1): 266-282. DOI: 10.1109/TTE.2022.3192921. [7] LIN G, MA J J, LI Y, et al. A virtual inertia and damping control to suppress voltage oscillation in islanded DC microgrid [J]. IEEE transactions on energy conversion, 2021, 36(3): 1711-1721. DOI: 10.1109/TEC.2020.3039364. [8] LONG B, ZENG W, RODRÍGUEZ J, et al. Stability enhancement of battery-testing DC microgrid: an ADRC-based virtual inertia control approach [J]. IEEE transactions on smart grid, 2022, 13(6): 4256-4268. DOI: 10.1109/TSG.2022.3184985. [9] YANG H Q, LI T S, LONG Y, et al. Distributed virtual inertia implementation of multiple electric springs based on model predictive control in DC microgrids [J]. IEEE transactions on industrial electronics, 2022, 69(12): 13439-13450. DOI: 10.1109/TIE.2021.3130332. [10] LIN G, LIU J Y, WANG P C, et al. Low-frequency oscillation analysis of virtual-inertia-controlled DC microgrids based on multi-timescale impedance model [J]. IEEE transactions on sustainable energy, 2022, 13(3): 1536-1552. DOI: 10.1109/TSTE.2022.3157473. [11] LONG B, ZENG W, RODRÍGUEZ J, et al. Enhancement of Voltage Regulation capability for DC-microgrid composed by battery test system: a fractional-order virtual inertia method [J]. IEEE transactions on power electronics, 2022, 37(10): 12538-12551. DOI: 10.1109/TPEL.2022.3171556. [12] WANG J, HUANG W T, TAI N L, et al. A bidirectional virtual inertia control strategy for the interconnected converter of standalone AC/DC hybrid microgrids [J]. IEEE transactions on power systems, 2023. DOI: 10.1109/TPWRS.2023.3246522. [13] LIN G, LIU J Y, REHTANZ C, et al. A comprehensive stability assessment system for EV DC charging station based on multi-timescale impedance model [J]. IEEE transactions on transportation electrification, 2023. DOI: 10.1109/TTE.2023.3262629. [14] GUO J, CHEN Y D, LIAO S H, et al. Analysis and mitigation of low-frequency interactions between the source and load virtual synchronous machine in an islanded microgrid [J]. IEEE transactions on industrial electronics, 2022, 69(4): 3732-3742. DOI: 10.1109/TIE.2021.3075847. [15] LENG M R, ZHOU G H, LI H Z, et al. Impedance-based stability evaluation for multibus DC microgrid without constraints on subsystems [J]. IEEE transactions on power electronics, 2022, 37(1): 932-943. DOI: 10.1109/TPEL.2021.3093372. [16] PARK D, ZADEH M. Dynamic modeling and stability analysis of marine hybrid power systems with DC grid: a model-based design approach [J]. IEEE transactions on transportation electrification, 2023. DOI: 10.1109/TTE.2023.3296099. [17] SAHOO S, MISHRA S, JHA S, et al. A cooperative adaptive droop based energy management and optimal voltage regulation scheme for DC microgrids [J]. IEEE transactions on industrial electronics, 2020, 67(4): 2894-2904. DOI: 10.1109/TIE.2019.2910037. [18] KO B S, LEE G Y, CHOI K Y, et al. A coordinated droop control method using a virtual voltage axis for power management and voltage restoration of DC microgrids [J]. IEEE transactions on industrial electronics, 2019, 66(11): 9076-9085. DOI: 10.1109/TIE.2018.2877135. [19] XIAO J F, WANG P, SETYAWAN L. Multilevel energy management system for hybridization of energy storages in DC microgrids [J]. IEEE transactions on smart grid, 2016, 7(2): 847-856. DOI: 10.1109/TSG.2015.2424983. [20] KIM S H, BYUN H J, JEONG W S, et al. Hierarchical control with voltage balancing and energy management for bipolar DC microgrid [J]. IEEE transactions on industrial electronics, 2023, 70(9): 9147-9157. DOI: 10.1109/TIE.2022.3210517. [21] ZHU X R, MENG F Q, XIE Z Y, et al. An inertia and damping control method of DC–DC converter in DC microgrids [J]. IEEE transactions on energy conversion, 2020, 35(2): 799-807. DOI: 10.1109/TEC.2019.2952717. [22] ZHI N, DING K, DU L, et al. An SOC-based virtual DC machine control for distributed storage systems in DC microgrids [J]. IEEE transactions on energy conversion, 2020, 35(3): 1411-1420. DOI: 10.1109/TEC.2020.2975033. [23] JIANG Y J, YANG Y, TAN S C, et al. Distribution power loss mitigation of parallel-connected distributed energy resources in low-voltage DC microgrids using a Lagrange multiplier-based adaptive droop control [J]. IEEE transactions on power electronics, 2021, 36(8): 9105-9118. DOI: 10.1109/TPEL.2021.3050506. -

 点击查看大图
点击查看大图
图(7)
计量
- 文章访问数: 79
- HTML全文浏览量: 26
- PDF下载量: 15
- 被引次数: 0



















