
-
风功率具有间歇性、随机性等特点,伴随风电大规模并网,且风电机组为保证发电量最优,一般运行在最大功率跟踪模式下,输出的有功功率随风速变化[1-2];当风速突变时,必然带来风机输出功率突变,进而导致电网频率波动,且由于风电机组网侧变流器通常采用电网电压定向的控制方式,无法响应电网频率的变化,电网稳定性势必面临巨大挑战[3-5]。因此,风电机组具备惯量响应和一次调频调节能力是风电发展和提升风电机组并网频率适应性的必然趋势。
伴随《风力发电机组电网适应性测试规程》(GB/T 36994—2018)的实施,风电机组必须具备惯量响应和一次调频能力[6],需对电网频率变化率和频率偏差迅速响应,参与系统调频,支撑系统频率恢复。风电机组惯量响应能力针对系统频率变化率,当频率变化率超过阈值时,模拟同步发电机组惯量特性,快速提供有功支撑,减缓电网频率变化速率;一次调频能力针对系统频率偏差,模拟同步发电机组下垂控制特性,减小电网频率变化。
风电机组调频能力研究大多集中于风电机组惯量响应和一次调频控制方向[7-9]:惯量响应控制通过调节叶轮存储的动能输入/输出来改变风机输出功率,抑制系统频率的变化速率[10-11];一次调频控制主要包括超速备用控制和桨距角备用控制,均通过改变风电机组的机械功率输出量调节风机输出功率[12-13]。朱家文等[14]提出1种风电机组惯量支撑与一次调频协调控制策略,基于风电机组桨距角特性整定风机的减载控制,降低了初期电网扰动的变化率,但存在电网频率二次跌落的可能。赵晟凯等[15]提出风电机组自适应惯量和一次调频协调控制策略,有效改善传统超速减载风能利用率和调节裕度,并减少储能配置容量。茅靖峰等[16-17]通过桨距角备用控制的方式预留备用容量,在一次调频期间可提供稳定的有功支撑,避免了储能配置,但减少了风能利用率。单煜等[18-20]提出采用下垂控制实现风电场的一次调频,但并未对惯量响应能力进行验证。
本文采用惯量响应和一次调频的综合控制方式可在电网频率扰动时,增发或减少相应的有功功率抑制其频率的变化,提升风电机组的并网适应性。同时设计风电机组的惯量响应和一次调频主控制器算法,在联合仿真平台及项目现场实际测试验证算法的正确性及有效性。
-
风电机组惯量响应功能是响应电网频率变化率,可通过调节转子存储动能来短时进行功率支撑,响应速度快;一次调频功能是响应电网频率偏差,通过调节桨距角进行长时功率支撑,响应速度较慢。惯量响应和一次调频机理[21]在多处文献已有阐述,此处不再赘述。以下内容根据标准对风电机组惯量响应和一次调频能力进行分析。
-
1)触发条件
要实现风电机组的惯量响应功能,且在频率恢复过程中不触发惯量响应功能,需满足以下条件:
条件1:打开惯量响应使能开关(关闭一次调频使能开关)
条件2:
$\left\{ \begin{array}{l} \dfrac{{{{\rm{d}}}f}}{{{\rm{d}}t}} > {{\rm{d}}}{f_ + } \\ \dfrac{{{{\rm{d}}}f}}{{{{\rm{d}}}t}} < {{\rm{d}}}{f_ - }\\ \Delta f\dfrac{{{{\rm{d}}}f}}{{{{\rm{d}}}t}} > 0 \end{array} \right.$ 条件3:风电机组正常运行且网侧功率:
$$ {P > 20\text{%} }{P_{\rm{n}}} $$ 式中:
df/dt——频率变化率(Hz/s);
df+ ——频率变化率上限,一般取0.3 Hz/s(Hz/s);
df− ——频率变化率下限,一般取−0.3 Hz/s(Hz/s);
Δz ——频率偏差量(Hz);
Pn ——风电机组额定有功功率(kW)。
上述条件2可满足在频率变化阶段,风电机组惯量响应功能触发,在频率恢复阶段风电机组惯量响应功能不触发。条件3的功率限制以防在风电机组进行惯量响应时功率降低至10%左右时进入共振穿越区,导致故障停机。
2)惯量响应有功功率给定值计算
当惯量响应功能触发后,主控系统会根据式(1)得出机组的有功功率变化值。
$$ \Delta {P_{{\rm{iner}}}} = - \dfrac{T}{{{f_{\rm{N}}}}}\dfrac{{{{\rm{d}}}f}}{{{{\rm{d}}}t}}{P_{\rm{n}}} $$ (1) 式中:
ΔPiner ——有功功率变化值(kW);
T ——惯性时间常数(s);
fN ——电网工频频率(Hz)。
风机惯量响应期间其有功功率增发量主要来自于风机叶片储存的动能,考虑风电机组载荷极限及风电机组安全运行,对惯量响应有功功率变化值ΔPiner进行限幅,得出ΔPiner的新表达式。
$$ \Delta {P_{{\rm{iner}}}}{\text{ = }}{\rm{li}}{{\rm{mi}}} {\rm{t}}({\rm{lo}}{{\rm{w}}_{{\rm{iner}}}} \times {P_{\rm{n}}},{\rm{hig}}{{\rm{h}}_{{\rm{iner}}}} \times {P_{\rm{n}}}) $$ (2) 式中:
loweriner ——惯量响应功率变化限幅下限值,一般取−10%(pu);
highiner ——惯量响应功率变化限幅上限值,一般取10%(pu)。
综上可得出,风电机组在惯量响应期间的有功功率给定值为:
$$ {P_{{\rm{ref}}}} = {P_0} + \Delta {P_{{\rm{iner}}}} $$ (3) 式中:
Pref ——惯量响应期间风电机组有功功率给定值参考值(kW);
P0 ——频率开始变化时刻的有功功率值(kW)。
-
1)触发条件
条件1:打开一次调频使能开关(关闭惯量响应使能开关)
条件2:f<fd−或f>fd+
条件3:风电机组限功率运行且网侧功率:
$$ P{\rm{ > 20\% }}{P_{\rm{n}}} $$ 式中:
F ——实际电网频率(Hz);
fd− ——频率下限阈值,取49.8 Hz;
fd+ ——频率上限阈值,取50.2 Hz。
2)一次调频有功功率给定值计算
当f<fd−时,一次调频有功变化量如式(4)所示:
$$ \Delta {P_{{\rm{pri}}}} = - {K_{{\rm{f}}1}}\dfrac{{f - {f_{{\rm{d}}_{-} }}}}{{{f_{\rm{N}}}}}{P_{\rm{n}}} $$ (4) 当f>fd+时,一次调频有功变化量如式(5)所示:
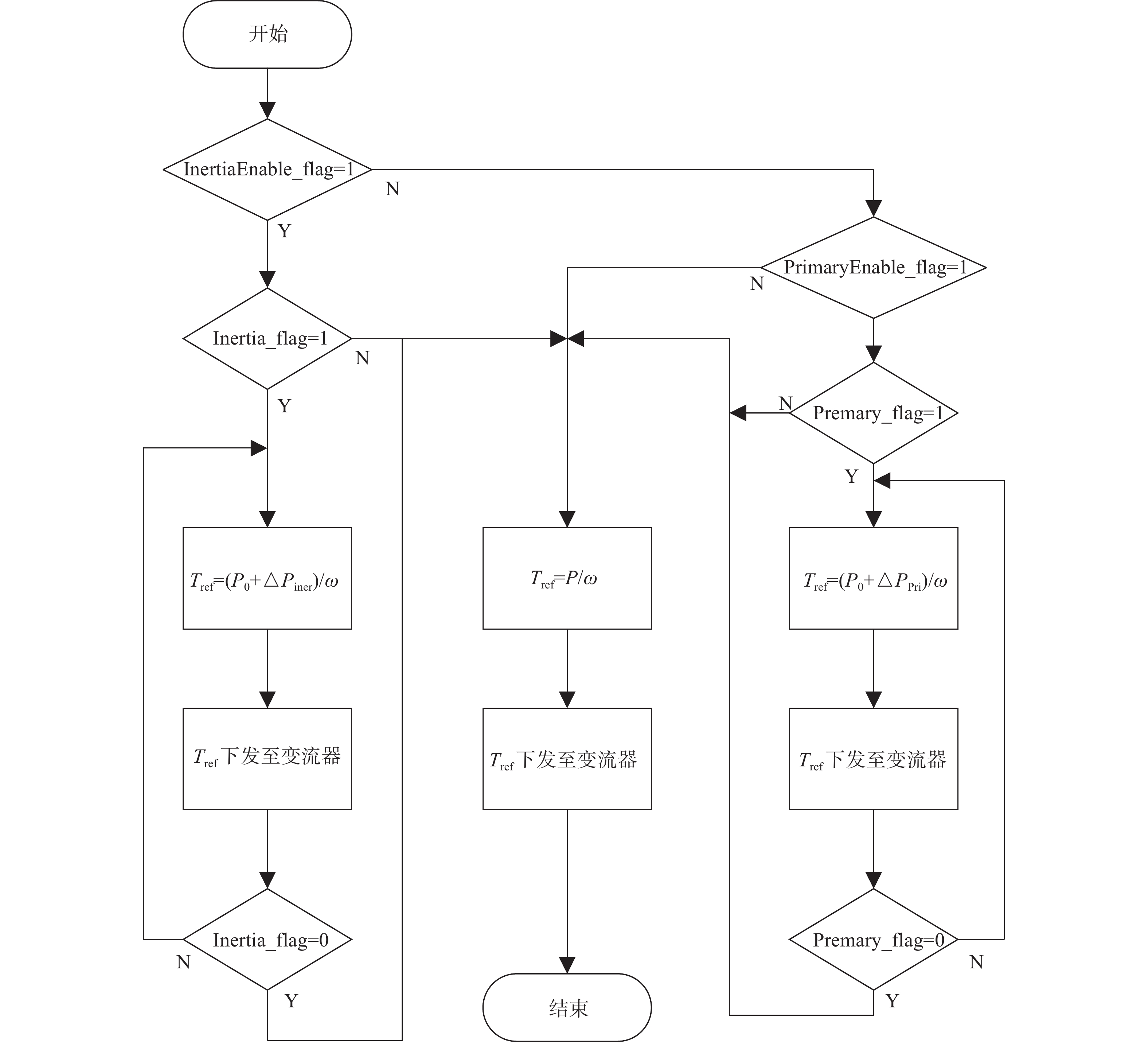
$$ \Delta {P_{{\rm{pri}}}} = - {K_{{\rm{f}}2}}\dfrac{{f - {f_{{\rm{d}}_{ + }}}}}{{{f_{\rm{N}}}}}{P_{\rm{n}}} $$ (5) 如图1所示,在一次调频过程中,需配合变桨系统进行开桨与收桨,风机逐渐释放约10%Pn的功率,最多再限制20%Pn功率,需对一次调频有功变化值ΔPpri进行限幅处理,其新的表达式如下:
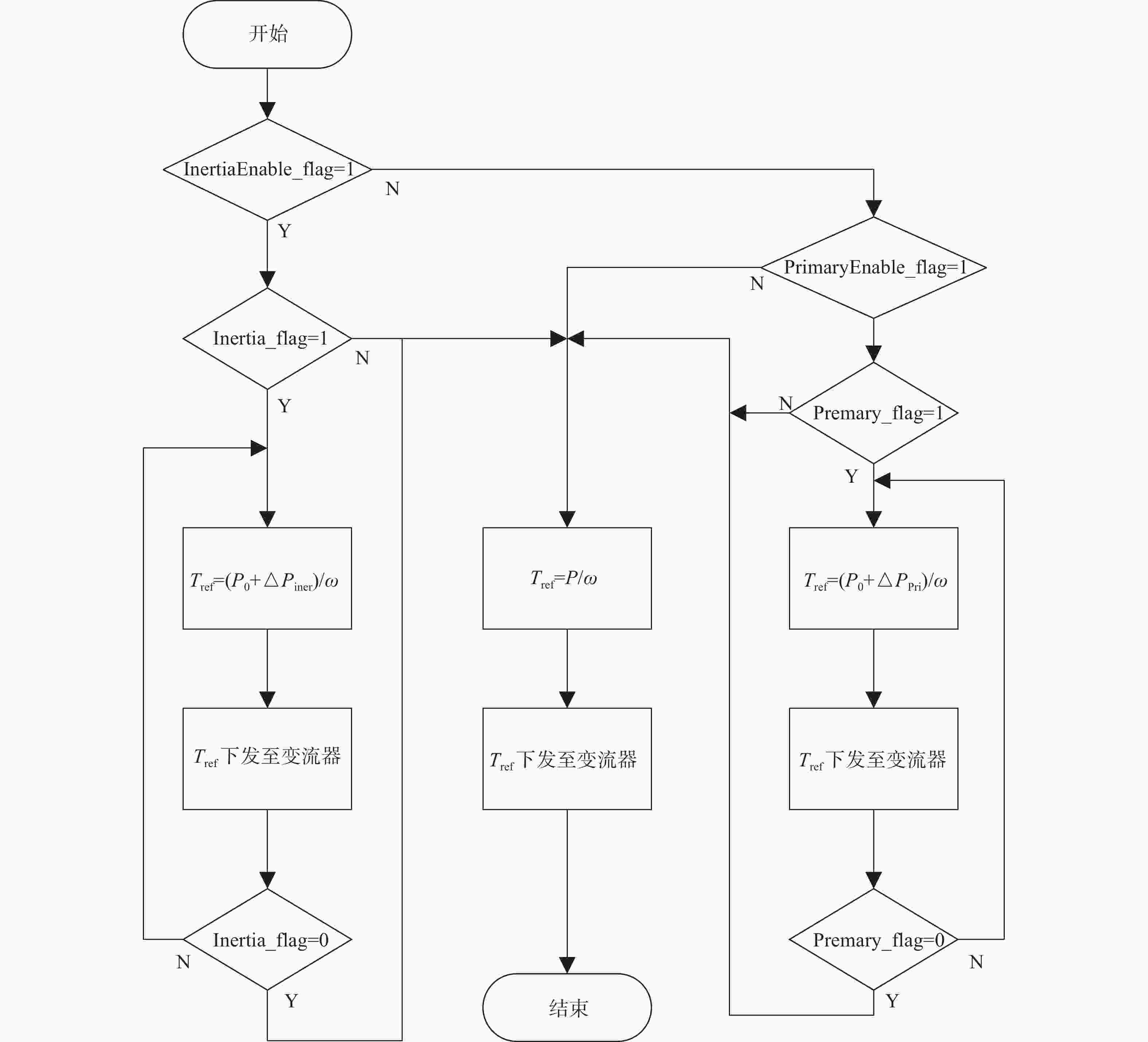
Figure 1. Inertia response and primary frequency regulation algorithm control block diagram
$$ \Delta {P_{{\rm{pri}}}}{\text{ = }}{\rm{Li}}{{\rm{mi}}} {\rm{t}}({\rm{lo}}{{\rm{w}}_{{\rm{fre}}}} \times {P_{\rm{n}}},{\rm{hig}}{{\rm{h}}_{{\rm{fre}}}} \times {P_{\rm{n}}}) $$ (6) 式(4-6)中:
Kf1,Kf2 ——调频系数,分别取值10和20(pu);
lowerfre ——一次调频功率变化限幅下限值,一般取10%(pu);
highfre ——一次调频功率变化限幅上限值一般取20%(pu)。
风电机组在一次调频期间的有功功率给定值为:
$$ {P_{{\rm{ref}}}} = {P_0} + \Delta {P_{{\rm{pri}}}} $$ (7) -
风电机组的惯量响应和一次调频功能由主控系统和变流器共同完成。其主控系统的控制算法逻辑如图1所示。变流器实时检测三相电网电压,同时上传频率、频率变化率、惯量响应及一次调频标志位至主控系统,主控系统根据变流器上传的信号结合惯量响应功能和一次调频功能使能标志位信号进行动作。当惯量响应使能标志位为1时,变流器检测电网频率变化率df/dt超过阈值时,变流器惯量响应标志位置1,同时将标志位上传至主控系统,主控系统锁定当前有功功率并记录为P0,有功功率给定值按式(3)给定;当一次调频标志位为1时,机组按主控设定值进行限功率运行(一般限制在0.5 Pn),变流器实时检测电网频率偏差超过阈值时,变流器惯量响应标志位置1,同时将一次调频标志位上传至主控系统,主控系统锁定当前有功功率并记录为P0,一次调频期间有功功率给定值按式(7)给定,频率恢复后,机组立刻切换至限功率运行状态;在惯量响应和一次调频运行过程及正常运行过程中,变流器接收主控下发的转矩指令Tref进行变流器控制。
根据标准要求,惯量响应过程响应时间要求不超过500 ms,一次调频过程响应时间要求不超过5 s。惯量响应和一次调频功率调节时间可分为两个阶段:第一阶段为变流器和主控系统的通讯延时,经过实际测试该过程一般为200 ms左右;第二阶段为功率调节时间:惯量响应功率由于响应速度快,功率调节时间一般在200 ms(功率调节速率一般设置为100%Pn/s,可根据响应时间进行适当调整)即可保证有功功率进入标准要求误差带;一次调频功率调节时间一般在2~3 s(功率调节速率一般设置为10%Pn/s,可根据响应时间进行适当调整)即可保证有功功率进入标准要求误差带。
-
为验证风电机组惯量响应和一次调频能力算法的正确性和有效性,在联合仿真平台分别建立风电机组仿真模型。风电系统主要参数如表1所示:
名 称 参 数 风机额定容量 4 MW 机组额定电流 3 347 A 额定风速 11 m/s 齿轮箱增速比 21 PMSG直轴电感 0.16 mH PMSG交轴电感 0.20 mH 定子电压 690 V Table 1. Parameters of wind power system
-
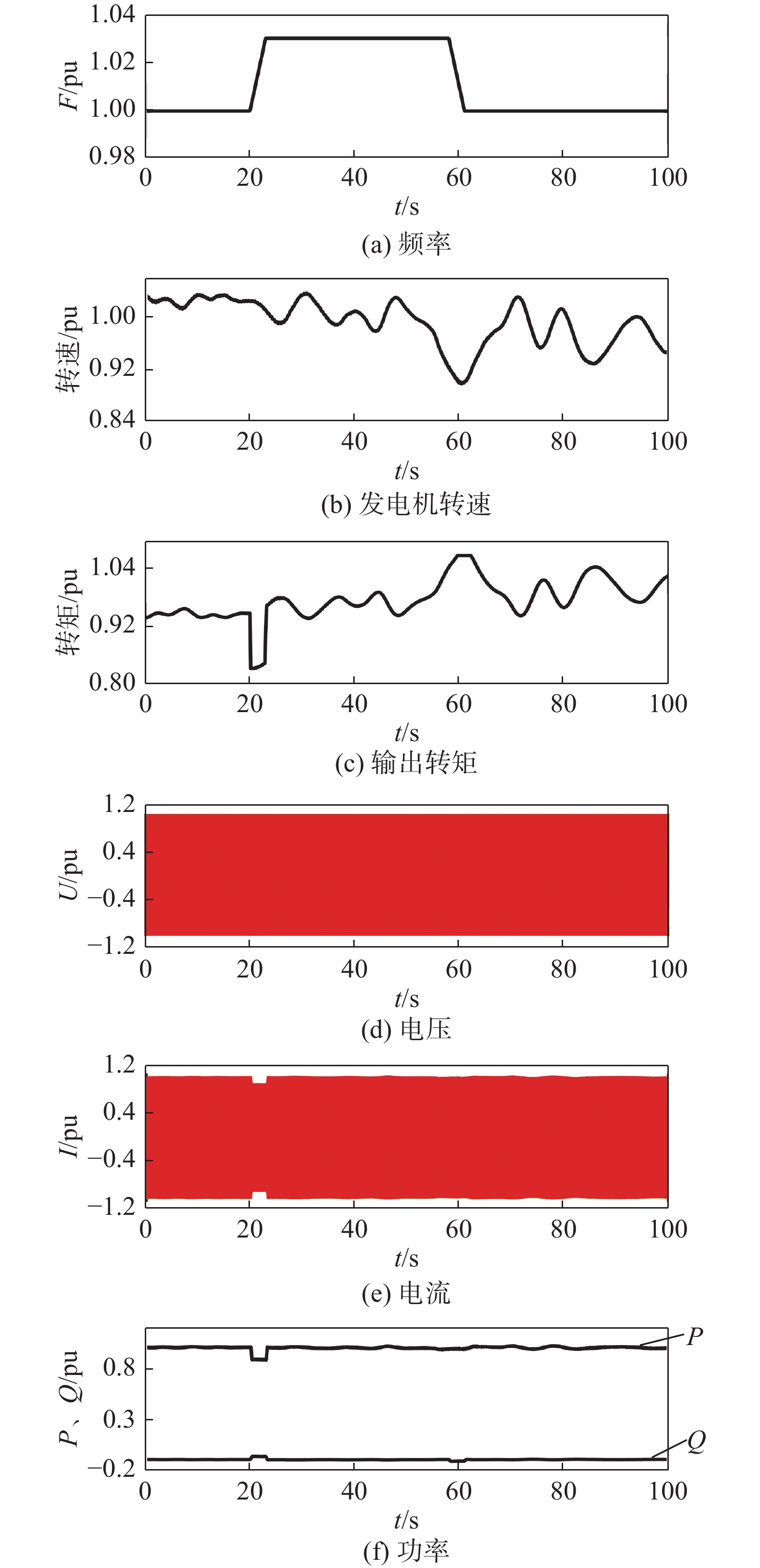
电网扰动装置频率以0.5 Hz/s的变化率由50 Hz变化为51.5 Hz/s。其频率变化波形及风电机组相关量的波形图如图2所示。从图中发电机转速Gspeed和转矩Torque波形可以看出,在惯量响应期间,发电机转速控制平稳,转矩在频率变化时刻响应频率的变化率。在20 s处频率开始变化时刻,有功功率此时为1.003 pu,在惯量响应期间有功功率P约为0.89 pu,有功功率变化量为0.113 pu,达到标准要求10%;响应时间约为297 ms(其中包含170 ms左右的通讯延时及响应延时,有功功率变化下降时间约为127 ms),约为标准要求时间500 ms一半左右;在0.5 Hz/s变化率工况下,控制算法控制效果明显。
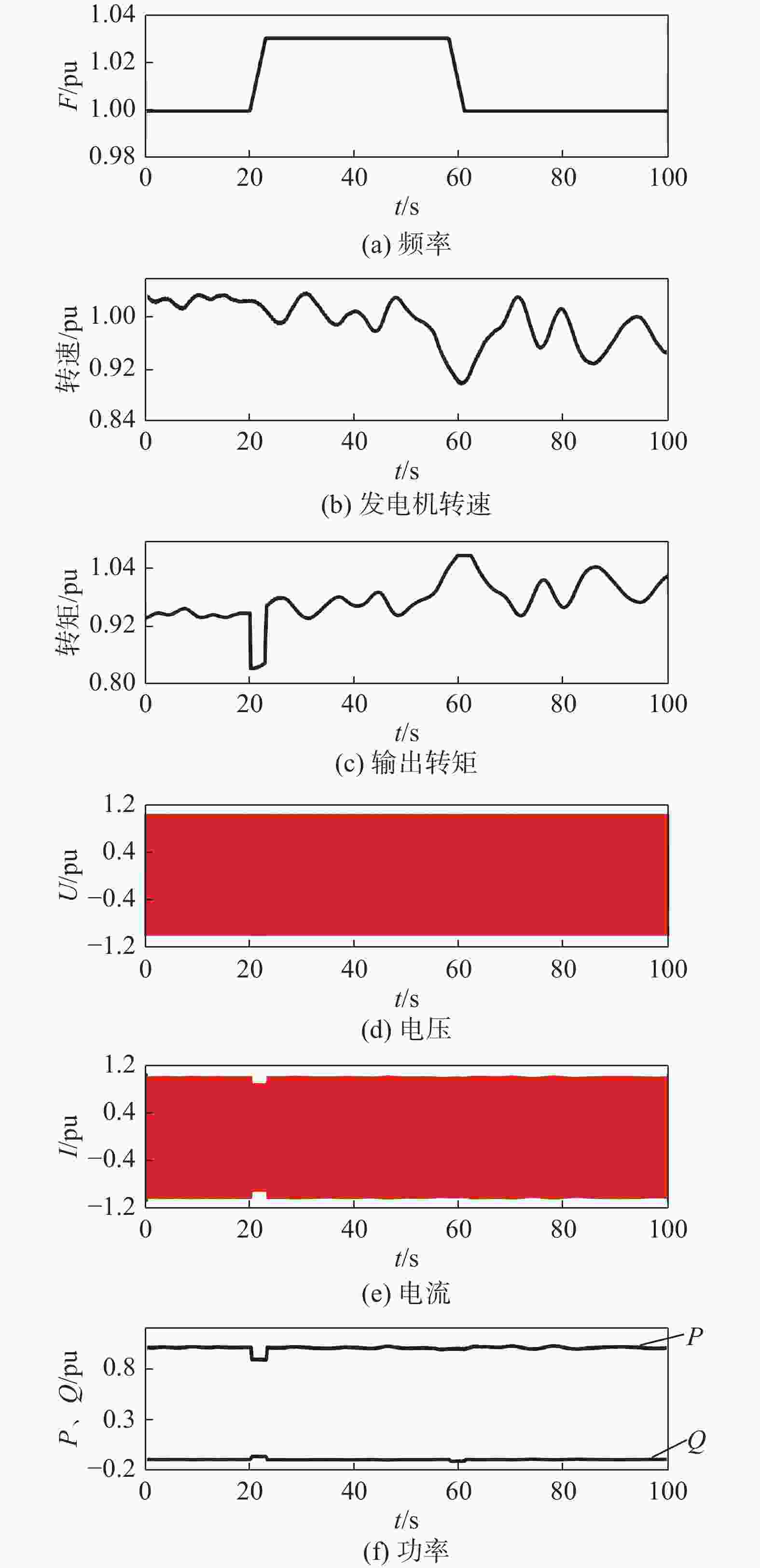
Figure 2. Frequency change rate (0.5 Hz/s) response waveform
-
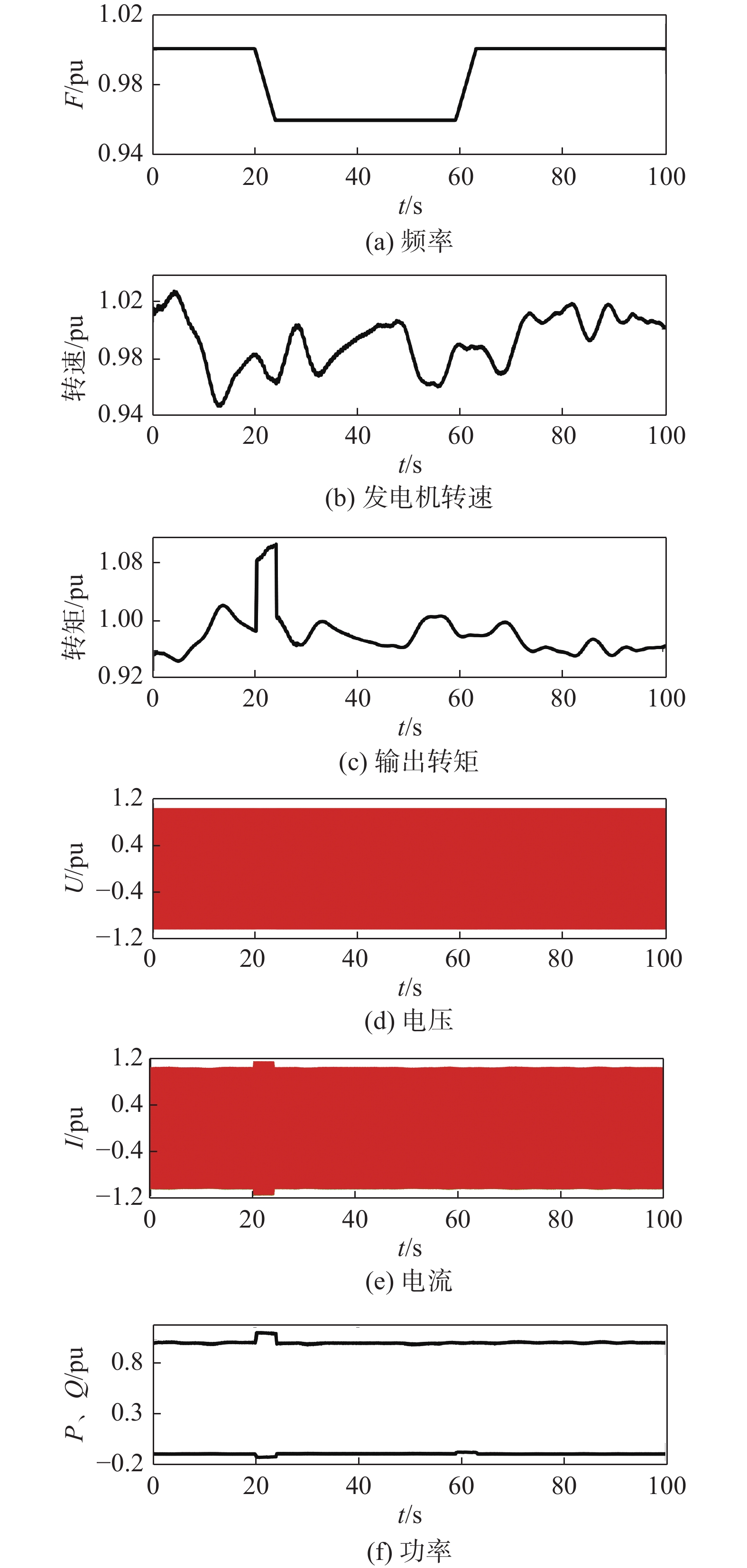
在频率由50 Hz变化为48 Hz的−0.5 Hz/s频率变化率工况下,由图3发电机转速Gspeed波形可以看出,由于初始功率约1 pu左右,在惯量响应期间为实现惯量支撑,风电机组会释放转子存储的动能,发电机转速短时上升;整个频率变化期间,发电机转速控制稳定,并未出现超速和失速的现场,主控系统控制稳定。其有功功率在频率变化前约为1.003 pu,惯量响应期间有功功率变化至1.097 pu左右,响应时间约为340 ms左右(通讯延时及响应时间约160 ms),频率恢复期间,有功功率最大值约1.011 pu,最小值约为0.985 pu,有功功率控制稳定。整个−0.5 Hz/s频率变化率的惯量响应期间,风电机组有功功率响应速度在标准要求之内,且有功功率恢复过程中,其偏差仅为0.026 pu左右,联合仿真模型及控制程序作用效果明显,且在频率恢复过程中并未出现频率二次跌落的问题。
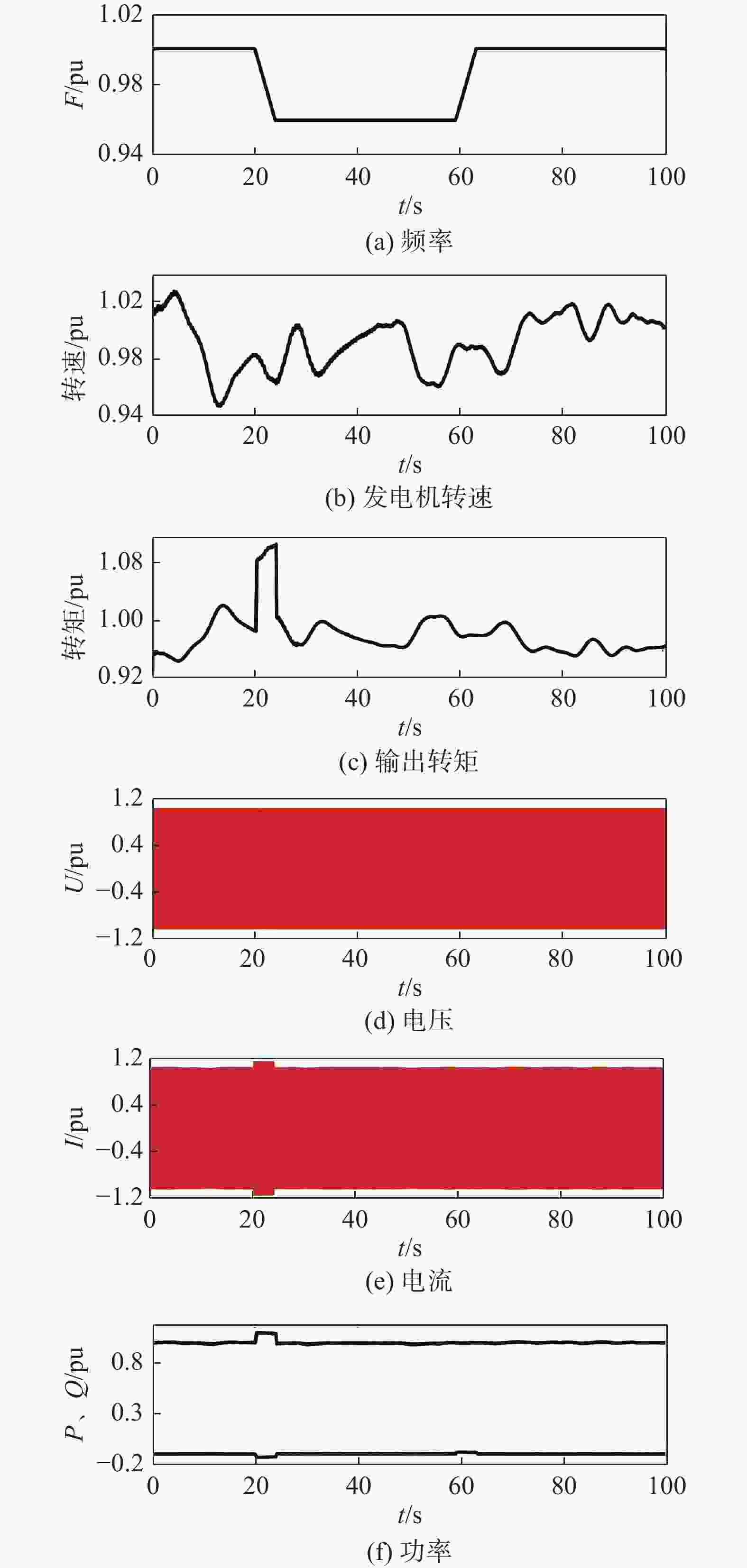
Figure 3. Frequency change rate (−0.5 Hz/s) response waveform
-
一次调频功能实现采用桨距角备用的形式实现,在频率变化前通过变桨系统收桨预留足够的备用容量,在一次调频过程中配合变桨系统收/开桨实现长时功率支撑。
-
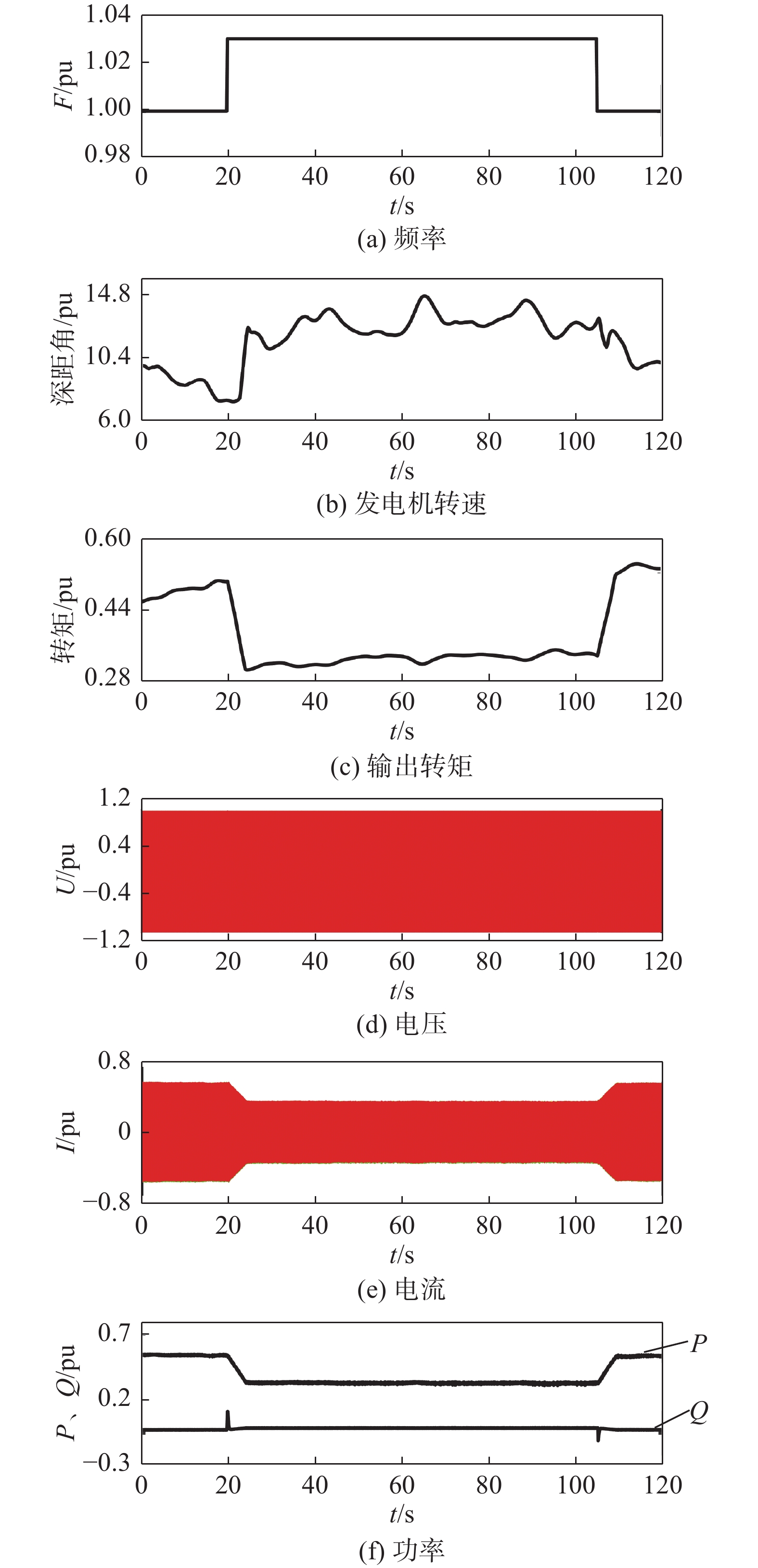
在联合仿真平台中模拟频率偏差,频率变化设置为200 Hz/s,频率值设置由50 Hz变化至51.5 Hz。联合仿真模型中电网频率、风电机组桨距角,风电机组输出转矩、三相电压电流及并网点有功功率P及无功功率Q变化波形图如图4所示。
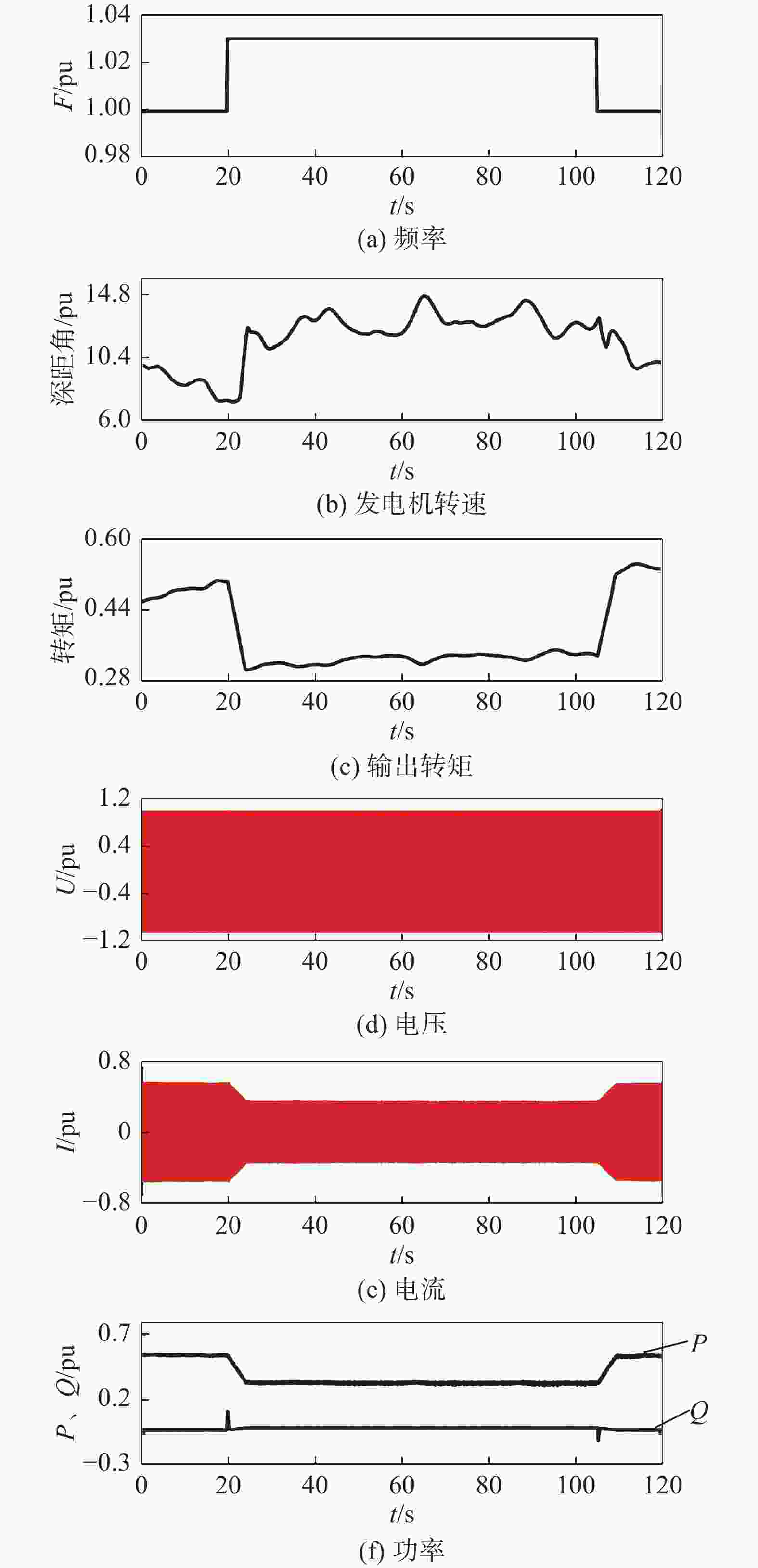
Figure 4. Primary frequency regulation 50~51.5 Hz waveform
在电网频率变化时,主控系统根据变流器上传信号进入一次调频状态,此时桨距角Pitch逐渐响应功率变化,由一次调频前的7.5°左右,逐渐增大至12°左右(桨距角实际状态根据风速实时变化)。整个一次调频期间有功功率由一次调频前0.535 pu变化至0.327 pu,其响应时间约3.906 s(小于标准要求的5 s),整个一次调频过程中约向电网提供约0.208 pu且3%左右波动的有功支撑(满足标准要求的0.2 pu且波动小于4%);并网点无功功率Q仅在频率变化时刻,产生约2个周期的暂态波动。整个一次调频50~51.5 Hz的过程中,有功功率控制稳定,主控系统控制效果良好。
-
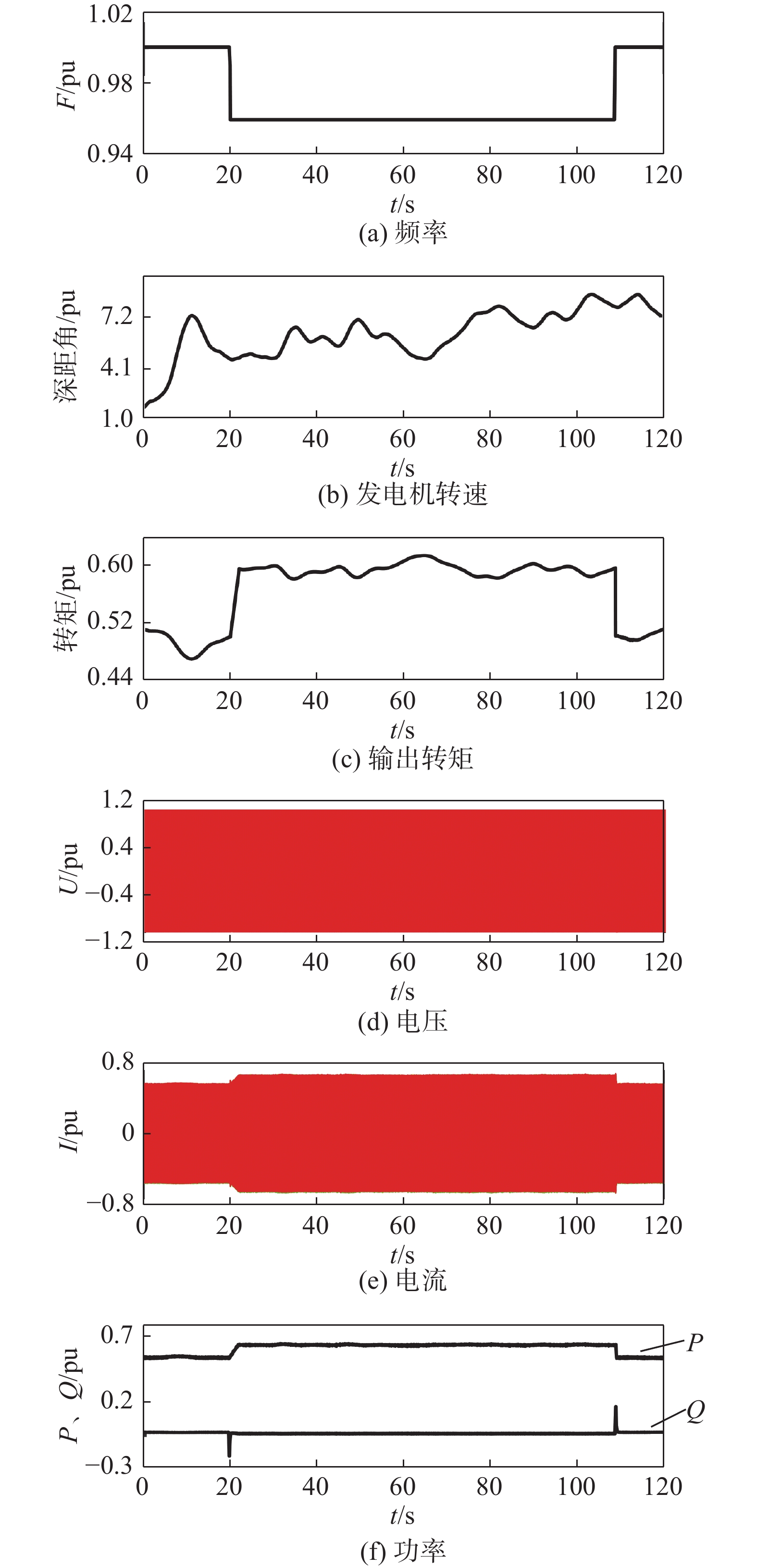
以上节相同的设置方式,将频率设置为50 Hz至48 Hz,风电机组相关量波形图如图5所示。在电网频率变化时,风电机组响应频率变化,主控系统下发至变流器的转矩Torque响应频率的变化,有功功率由一次调频前的0.537 pu增发至0.637 pu,为电网提供约0.1 pu的有功支撑,可有助于频率恢复。整个一次调频期间,有功功率响应时间约2.046 s,风电机组有功功率响应迅速且控制稳定。
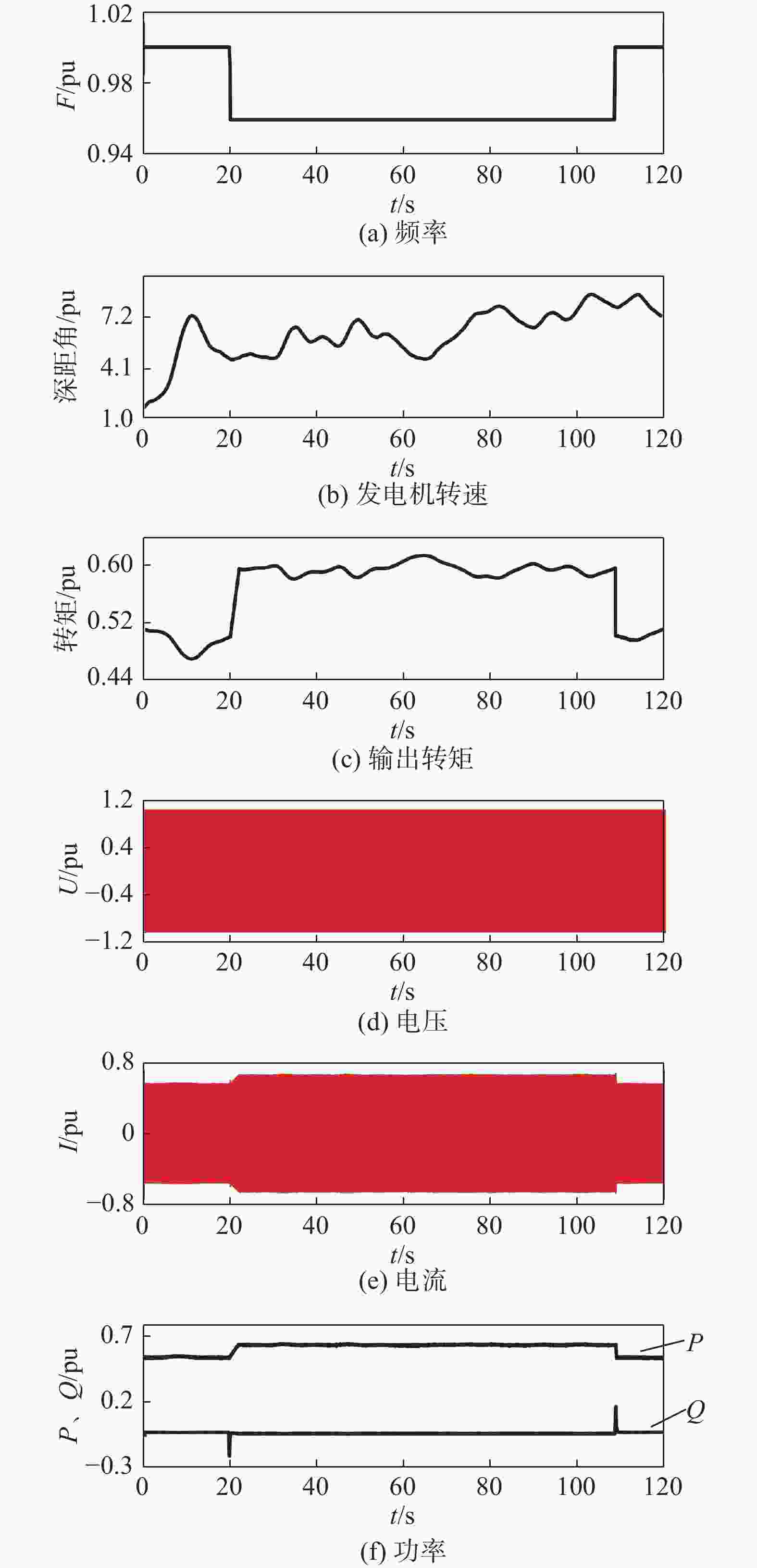
Figure 5. Primary frequency regulation 50~48 Hz waveform
-
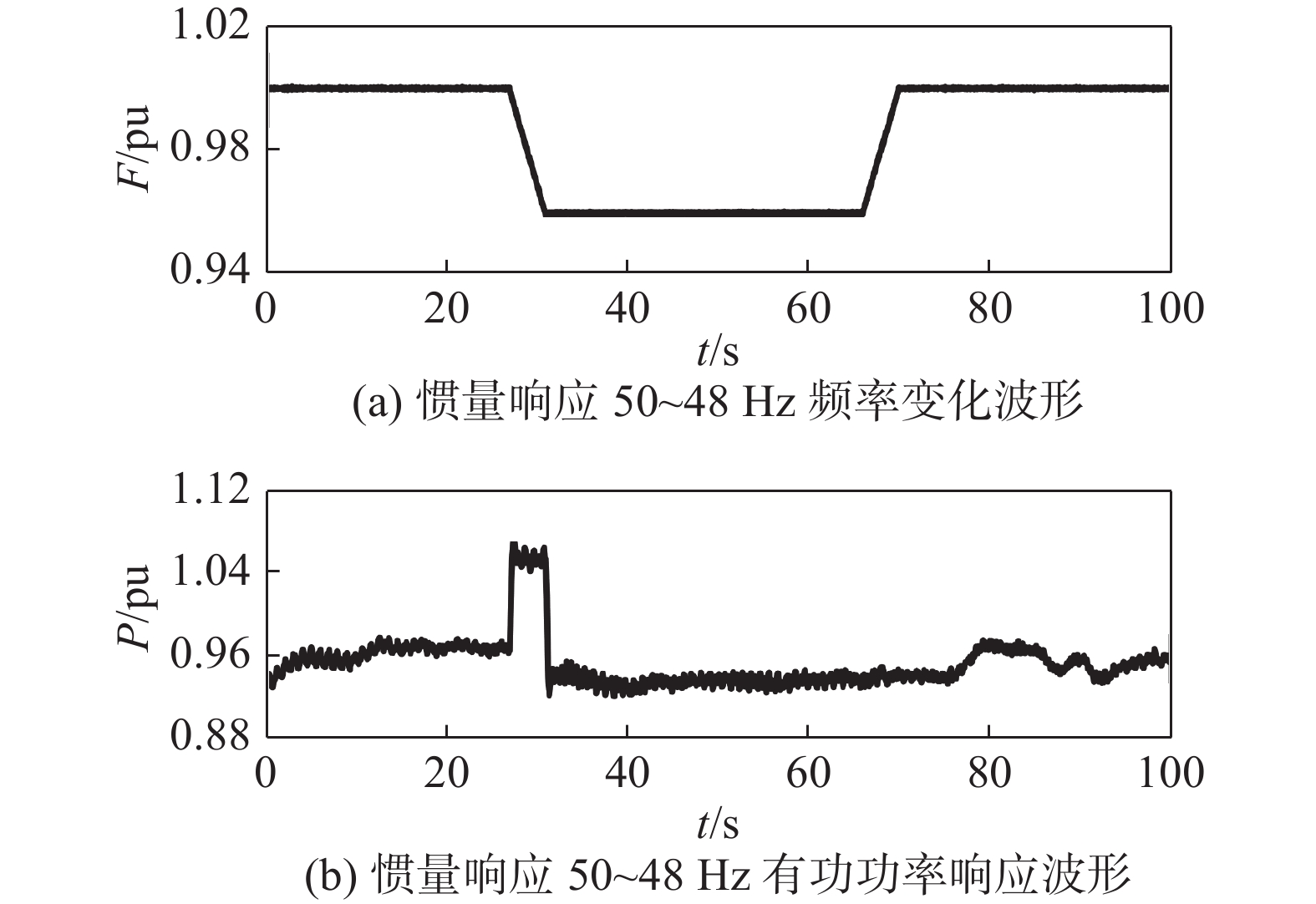
为进一步验证惯量响应和一次调频算法的正确性和有效性,在某项目现场采用移动式电网适应性测试车进行风电机组惯量响应与一次调频能力测试,电网适应性测试车串联于风电机组升压变压器和电网之间,产生相应的频率扰动,其测试结果及指标分别如图6~图9和表2所示。
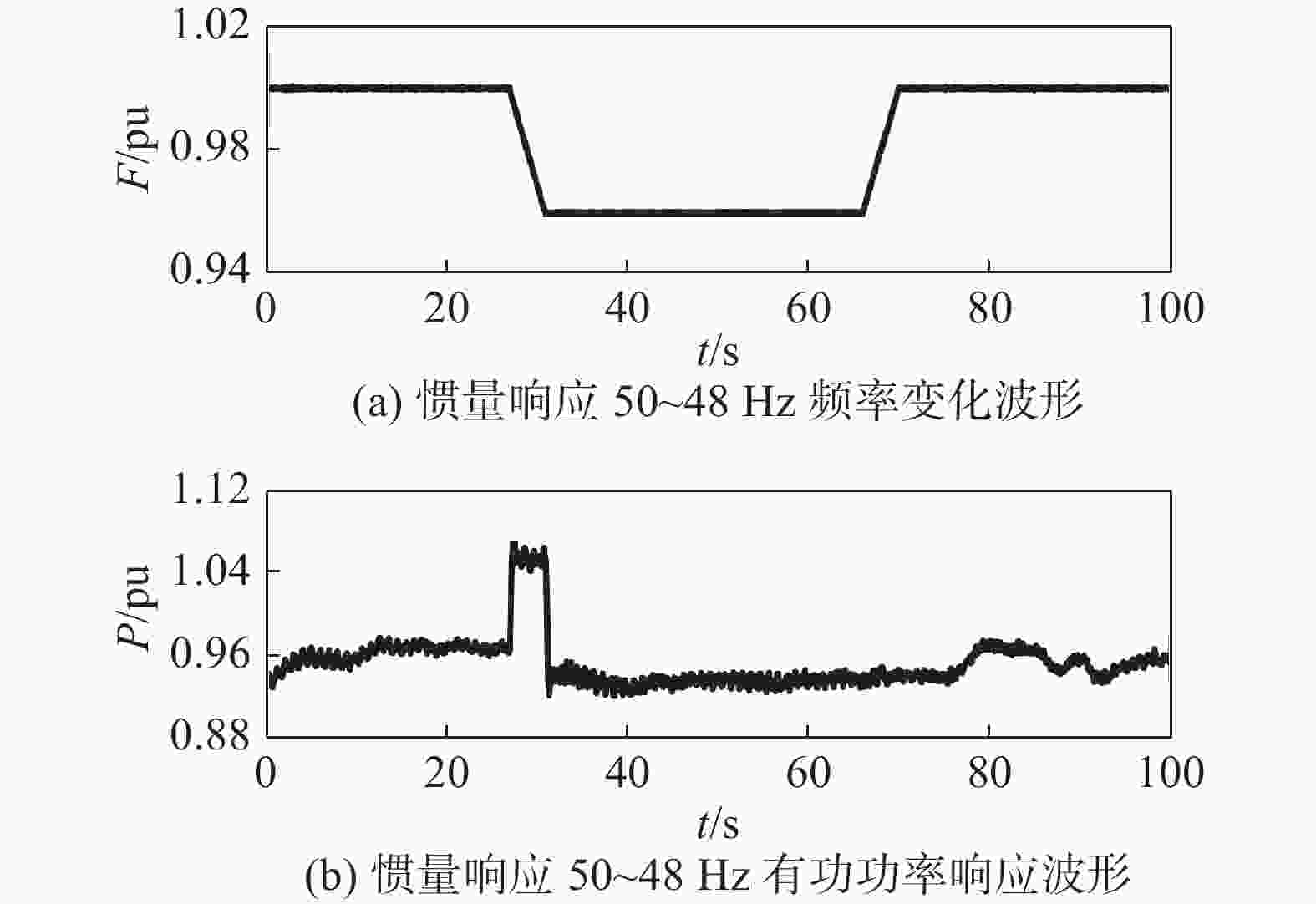
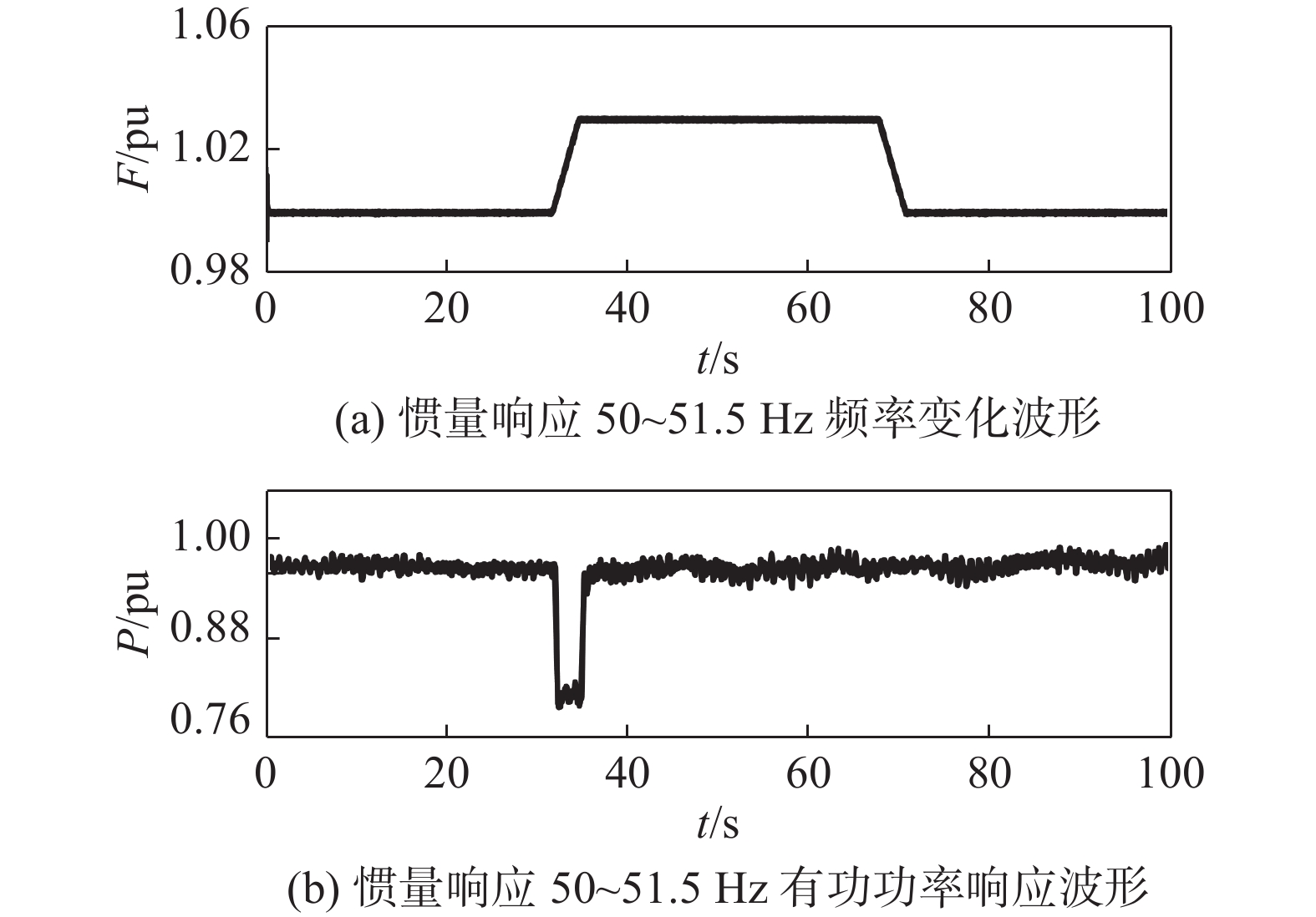
Figure 6. Inertia response (50~48 Hz) test results of wind turbine
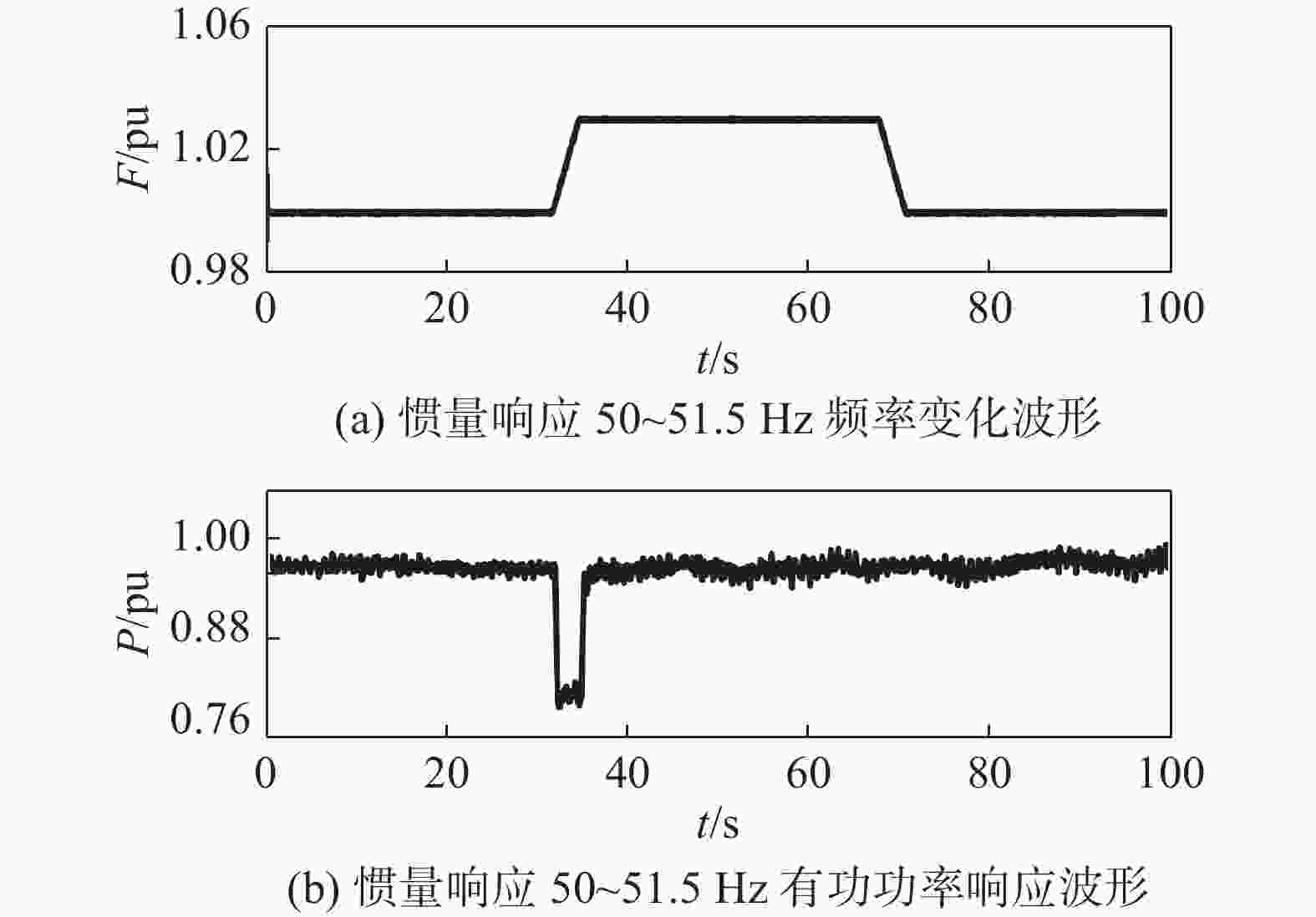
Figure 7. Inertia response (50~51.5 Hz) test results of wind turbine

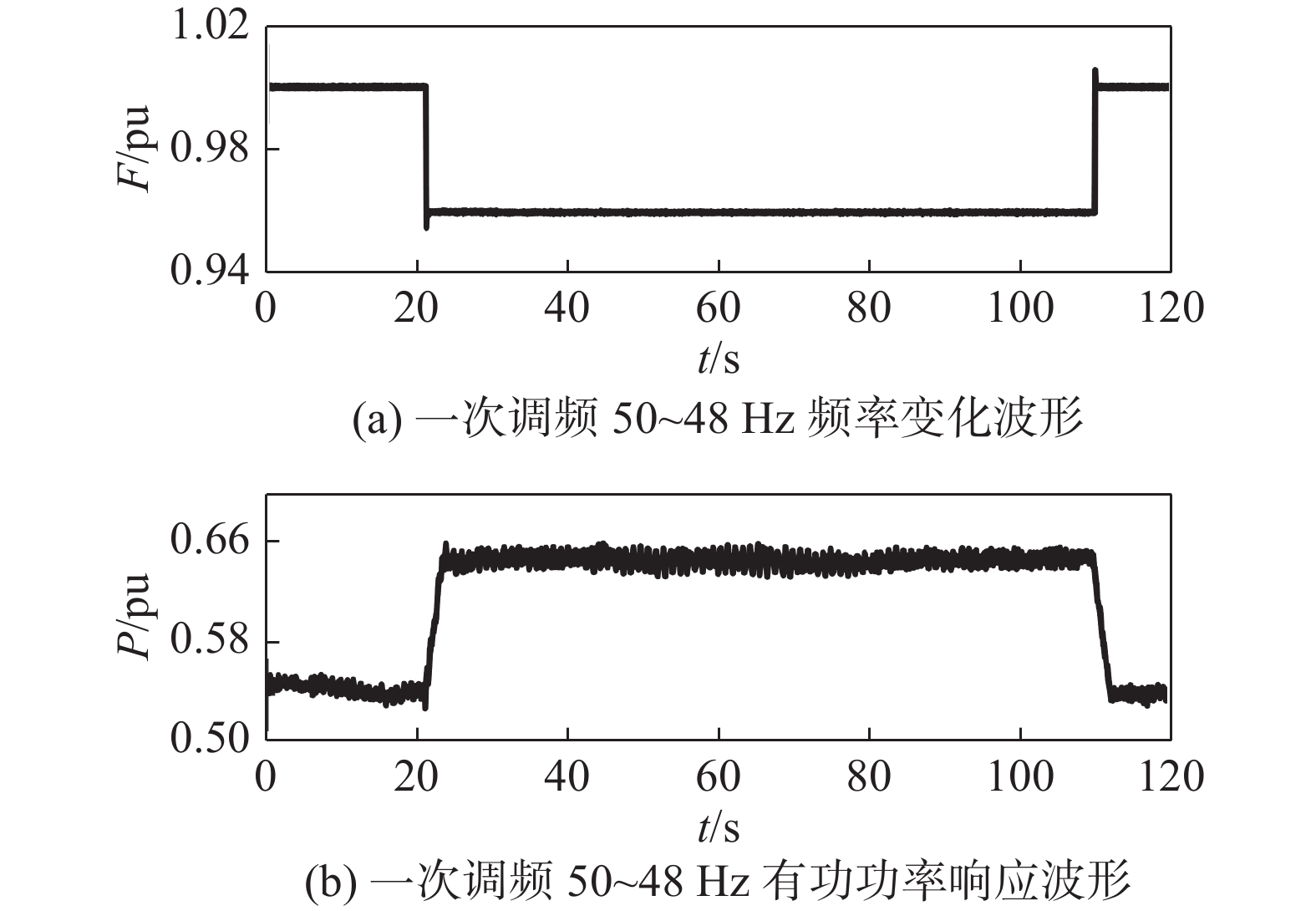
Figure 8. Primary frequency modulation (50~48 Hz) test results of wind turbine
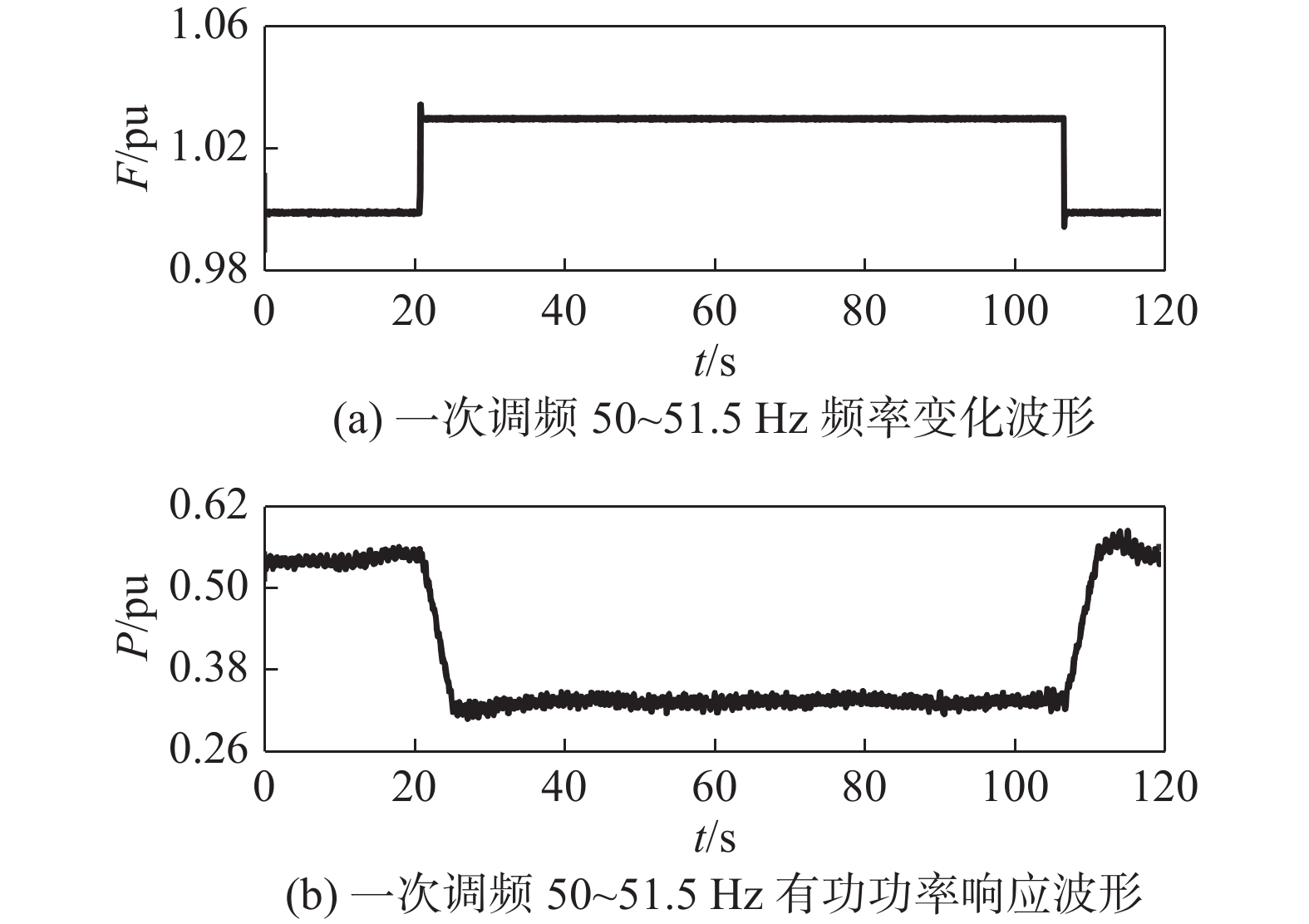
工况 频率变化/pu 扰动前有功值/pu 有功调节量/pu 响应时间/s 惯量响应 50~48.0 0.967 0.101 0.444 50~51.5 0.962 0.152 0.424 一次调频 50~48.0 0.539 0.106 2.270 50~51.5 0.551 0.210 4.050 Table 2. Inertia response and primary frequency regulation characteristics of wind turbine
惯量响应使能开关开启后,在检测到电网频率变化率超过0.3 Hz/s后,风电机组进行惯量响应,响应时间基本在440 ms左右,满足标准要求;有功变化量也在标准要求之内。
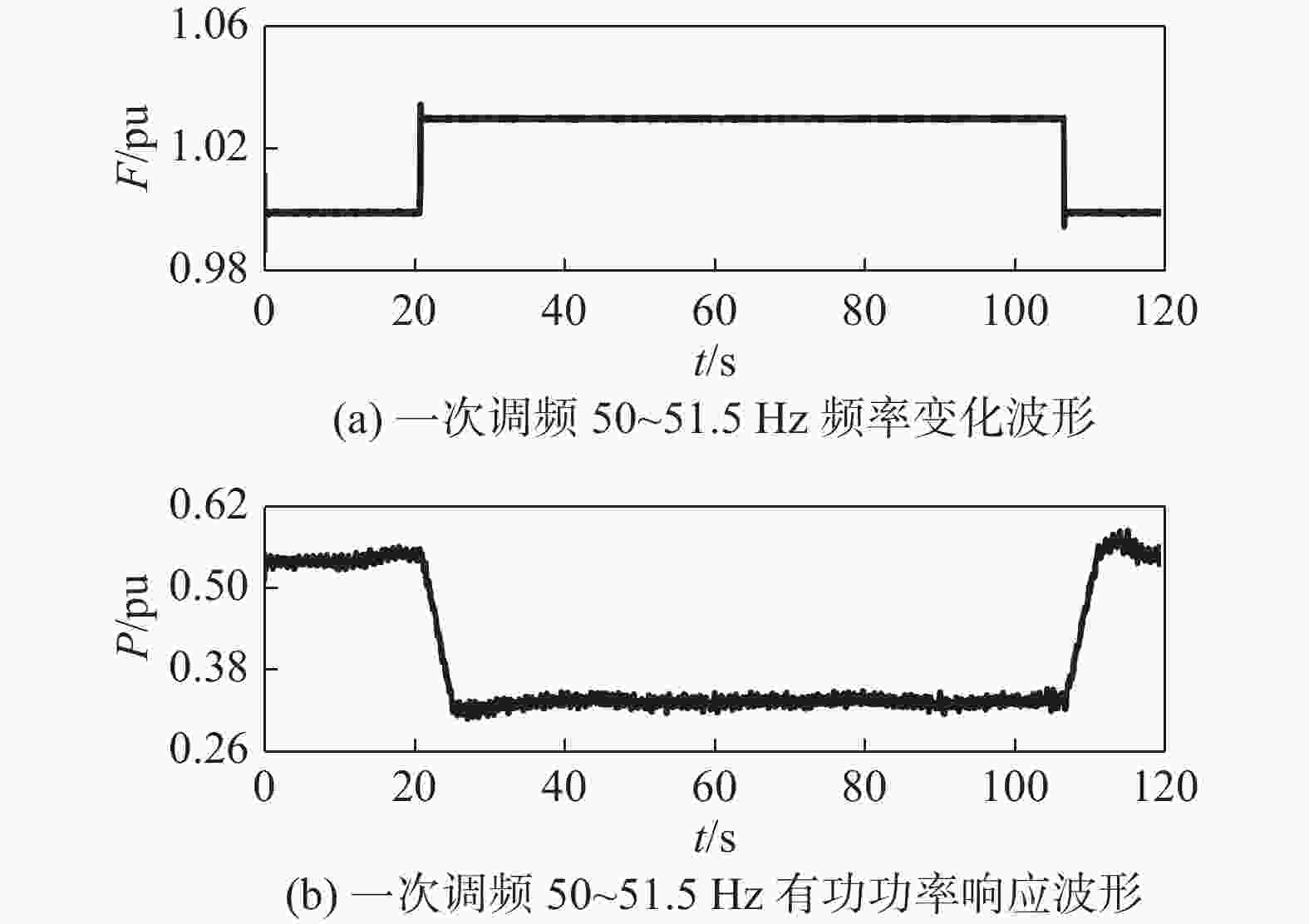
Figure 9. Primary frequency modulation (50~51.5 Hz) test results of wind turbine
一次调频使能开关开启后,在检测到电网频率偏差超过阈值(±次调频 Hz)时,风电机组参与系统调频,适当增发或降低相应有功功率,支撑系统频率恢复,其响应时间也远快于标准要求的5 s。
-
本文采用惯量响应和一次调频相结合的综合控制方式,可向电网提供相应的有功支撑,用以抑制频率或频率变化率的变化,能有效改善风电机组的频率适应性能力,通过仿真和实测研究得出:
1)风电机组能在迅速响应电网的频率扰动,向电网提供有功支撑,提升风电机组的并网频率适应性能力。
2)通过联合仿真平台验证主控制系统算法的正确性和有效性。
3)现场测试结果表明被测风电机组满足最新的电网适应性测试规程,更进一步验证算法有效性。
Research for Inertia Response and Primary Frequency Regulation Ability of Wind Turbine
doi: 10.16516/j.gedi.issn2095-8676.2023.04.008
- Received Date: 2023-02-03
- Rev Recd Date: 2023-03-28
- Available Online: 2023-05-26
- Publish Date: 2023-07-10
-
Key words:
- inertia response /
- primary frequency regulation /
- active support /
- co-simulation /
- main control algorithm /
- frequency change
Abstract:
| Citation: | GUO Jiangtao, CHEN Shuo, ZENG Ruibin, HUANG Liling, ZHANG Yifeng. Research for Inertia Response and Primary Frequency Regulation Ability of Wind Turbine[J]. SOUTHERN ENERGY CONSTRUCTION, 2023, 10(4): 82-90. doi: 10.16516/j.gedi.issn2095-8676.2023.04.008

|











 DownLoad:
DownLoad: