

-
摘要:目的 由于生态保护和风场边界等条件的限制,有些机位点的主风向方向存在明显山头障碍物遮挡,影响了机组的发电量和安全性能,文章旨在研究减小山头对机组影响的方法。方法 基于STAR-CCM+软件平台对主风向上有山头遮挡的机位点附近地形进行了数值模拟,分析了扇区管理、提高轮毂高度、地形修整等方法对机组的安全影响。结果 结果表明:扇区管理、提高轮毂高度和地形修整都能改善风机的安全性。但在该项目中,采用双平台的地形修整的方法对改善风机安全性更加有效。结论 分析结果可为如何降低来风方向的山头对风机的影响提供方法参考。Abstract:Introduction Due to the limitation of ecological protection and wind field boundary, there are obvious hill obstacles in the prevailing wind direction of some turbine sites, which affects the generating capacity and safety performance.This paper aims to study the methods to reduce the impact of the hilltops to the wind turbine.Method The numerical simulation method was applied for the the terrain with hilltop in the prevailing wind direction around the turbine site based on STAR-CCM+ software, analyzing the influence of sector management, elevating hub height and terrain optimization on the safety performance of the wind turbine.Result It's shown that sector management, elevating hub height and terrain optimization can improve the safety of the wind turbine. However, the method of double platform terrain optimization is more effective to improve the safety of the wind turbine for the project.Conclusion The results can provide reference for how to reduce the impact of upwind hilltop on the wind turbine.
-
Keywords:
- wind power development /
- safety analysis /
- wind turbine /
- CFD method /
- terrain optimization
-
棒控和棒位系统RGL(Rod Position Indication and Rod Control System)是核电机组最重要的控制系统之一,其性能好坏直接关系到电站的可用性。
RGL系统在核电机组启堆、功率变化和停堆过程中,通过控制棒驱动机构CRDM(Control Rod Drive Mechanisms)来提升、插入和保持反应堆控制棒,并对每一束控制棒在堆芯的实时位置进行监视,从而控制反应堆的反应性,保证反应堆始终处于安全状态[1-3]。
RGL系统是一个很复杂的系统,从国内外核电机组运行经验来看也出现过各种各样的故障模式[4-6]。当该系统出现双夹持故障(double-hold fault)时会将整个控制棒组闭锁,且故障棒束及故障原因无法在主控室查看,需要运行人员现场对机柜进行确认。该故障发生在机组进行瞬态工况运行时,可能会导致反应堆停堆。本文结合国内某CPR1000核电机组的双夹持故障经验反馈,对故障原因进行了深入分析与研究。
1. RGL系统描述
1.1 RGL系统功能[7-9]
1) RGL系统通过控制棒驱动机构(CRDM)使控制棒组件在堆芯中进行提升、插入或保持等动作,实现对反应堆反应性的实时控制,并对控制棒的棒位信息进行指示和监测。
2) RGL系统参与的自动控制功能包含反应堆堆芯功率控制功能和冷却剂平均温度控制功能。
3) RGL系统控制和调节功率补偿棒组的棒位,使功率补偿棒组的棒位与功率需求棒位相一致,实现核电机组一回路功率与二回路功率的平衡,完成反应堆负荷跟踪模式(G模式)的控制,实现堆跟机运行模式。
4) RGL系统的温度棒组用于调节堆芯冷却剂的平均温度。通过使用反应堆冷却剂平均温度与参考温度之间的温度差值信号来驱动温度调节棒(R棒)动作,控制棒的移动方向和速度由温度差值信号决定。
5) RGL系统参与反应堆停堆操作。
1.2 RGL系统组成[10-12]
RGL系统结构图如图1所示。
1) 棒位指示系统(RPI)接收位于反应堆压力容器的控制棒位置探测器的信号,通过译码产生每个棒束组件(RCCA)的实际测量位置。产生的位置信号通过网络数据传输送往与棒位指示系统(RPI)相关的外部系统。它也接受棒控系统(RCS)的指令,例如每个子棒束要求的位置和移动指令。通过这些指令操作,如果实际测量位置信号和设定值存在偏差,RPI会产生报警信号。
2) 反应堆功率控制机柜RCC(Reactor Control Cabinet or Reactor Power Control Cabinet):包括反应堆温度自动控制和反应堆功率自动控制两个功能。
3) 控制棒驱动机构CRDM:属于RGL系统的执行机构。每台CRDM装置包括提升、传递、保持线圈各一个,3个线圈按一定时序通电/断电,带动两副勾爪抓入或退出驱动轴齿槽,从而带动控制棒提升或插入。
4) 棒控系统RCS(Rod Control System):接受自动提插棒及棒速信号实现反应堆温度和功率的自动调节;接受主控指令和各种联锁信号实现手动或校1、校2模式控制。
2. RCS功能结构
RCS接收RCC传输来的控制棒手自动、提插指令以及反应堆紧急停堆信号(P4信号),经过与RPI传输来的测量棒位进行对比而产生指令控制供电单元向CRDM提供相应的时序电流从而达到控制目标,双夹持故障发生在此系统。
1) 控制逻辑设备(CLE):该设备用于根据外部动棒命令(movement order)、外部允许信号、棒位联锁和功率棒叠步程序,管理堆内子棒组的运动。控制逻辑功能分为两个主要的子功能:停堆和温度棒组控制逻辑和功率棒组控制逻辑,两个子功能均设置在控制逻辑处理单元(PLC)中。
2) 动力设备:由16个动力机柜组成,每个子棒组一个机柜。根据来自CLE机柜的动棒指令,动力设备产生合适的电流时序给CRDM线圈,使RCCA保持不动或移动。
每个动力机柜又由3个动力机架和1个逻辑控制单元(Cycler)机架组成:
3个动力机架分别对应同一子棒组夹持线圈(SG)、传递线圈(MG)和提升线圈(LC)。每个动力机架产生电流给同一子棒组的4个同样的线圈,同时能够执行输出电流监视和自测试功能。动力机架任何时候都根据来自CLE的动棒指令产生相应的时序电流。 每个动力机架产生的电流值由供电模块中的预制参数决定。每个供电模块控制一个线圈,并且能产生3中预制的电流值:全电流(FC)、半电流(RC)和零电流(ZC)。
Cycler机架由一个PLC处理单元和相应的硬件组成。Cycler是一个逻辑处理单元,用来产生电流定值信号给3个动力机架。Cycler接受来自CLE机柜的每一步子棒组动棒指令,根据指令产生时序电流定值来控制动力机架并使RCCA移动一步;当动棒指令缺失时,Cycler将产生定值,使SG线圈持续励磁保持RCCA不动。
3. 控制棒双夹持原理
双夹持功能是嵌入到供电模块的,当发生故障可能导致落棒时,子棒组的所有供电模块转到安全状态:由夹持线圈SG和移动线圈MG夹住控制棒,LG线圈闭锁不带电。在这种状态下,供电模块自动控制:不再接受动力机柜产生的电流整定值序列直到报警清除。内部电流序列如图3所示:
SG线圈和MG线圈产生FC并持续300 ms,之后持续产生RC,LC线圈电流为ZC。
只要SG线圈和MG线圈中有一个正常带电,控制棒就不会发生意外掉落的情形,双夹持被设计为低有效信号触发,用来防止控制棒失去电或者线路断线,触发信号如下:
1) 如果一个动力机架同时检测到两个以上电流整定信号会触发双夹持指令。
2) Cycler处理单元故障或者Cycler不可用,继电器失电时,双夹持触发。
3) SG线圈或者MG线圈Rack Off Chain单一故障,双夹持触发。
4) SG线圈或者MG线圈整定电流信息传输到机架故障,双夹持触发。
4. 运行经验反馈分析
4.1 双夹持故障触发经验反馈
2013 年11月 ,国内某CPR1000核电机组 1 号机主控操作员执行R棒下插1步操作,动棒未成功,电站计算机信息及控制系统(KIC)上显示有RGL001KA(RGL故障)、RGL005KA (棒控系统运行故障)、RGL006KA (RGL 运行故障)和 RGL009KA(PWE 机柜运行故障)。仪控人员现场检查发现 RGL016AR 机柜面板显示存在输出故障和运行故障,且机柜进入双夹持状态。
检查故障信号相关通道,未发现异常,重新进行功能验证,故障依然存在,怀疑控制器软件异常,执行控制器软件下装,验证R棒的提插功能后,RGL系统恢复正常。
4.2 故障原因分析:
根据现场RGL系统事件日志,最先触发的故障为输出故障 (output fault),在输出故障触发的同时,机柜进入双夹持状态,并且输出运行故障(operation fault),此现象与输出故障逻辑相符。输出故障的逻辑如图4所示:
此逻辑的目的是确保在任意时刻(除存在落棒指令或首次提棒),SG线圈和MG线圈机架至少有一个处于夹持状态,以防止落棒事件发生。由逻辑图可以看出,一旦机柜控制器逻辑检测到SG和MG机架同时处于释放状态,就会立即触发输出故障,并发送双夹持指令到动力机架。对机架夹持状态的检测是通过对控制器输出到动力机架(SG/MG)全电流指令(FC)和零电流指令(ZC)的回读(re-read)来实现的。逻辑对于SG或MG机架处于夹持与释放状态的判断准则是:当全电流回读指令出现并保持一段时间(对于SG机架,此时间为79 ms;对于MG机架,此时间为73 ms)后,逻辑即认为机架处于夹持状态;当零电流回读指令出现后,逻辑就立即认为机架处于释放状态。机柜出现输出故障,说明在故障时刻,逻辑判断SG和MG机架同时处于释放状态。
查看现场RGL系统报警视图,故障发生在控制器软件循环的 270 ms处。而故障时刻R棒正在执行插棒指令,插棒指令时序如图5所示:
从图5可以看出,在267 ms处,SG机架正好从全电流指令变成零电流指令,即逻辑中SG机架从夹持变成释放状态,而输出故障几乎在同一时刻(270 ms)触发,说明在270 ms时刻控制器认为 MG机架仍处于释放状态,但是在正常情况下,在 259 ms(186 ms+73 ms)时刻控制器就应当认为 MG机架处于夹持状态。所以控制器在270 ms未正确判断MG机架处于夹持状态是导致该故障发生的最直接原因。
4.3 建议措施
可以看出系统软件缺陷是造成RGL系统双夹持故障的重要因素,造成系统软件缺陷的原因包括:(1)设计缺陷,未能针对可能的软件缺陷问题设置相应的监测与预警手段;(2)系统参数设置,参数设置应该准确说明参数调整作用以及会出现的问题;(3)系统中存在隐藏的功能缺陷。
实际工程中需要从以下两个方面给予关注:
1) MG机架的全电流指令回路或全电流回读信号回路接触是否不良。
2) RGL系统动力机柜控制器软件或参数问题。
5. 结论
本文简述了双夹持故障原理,并从其设计原理的角度,结合某CPR1000核电机组RGL系统双夹持故障案例的回溯,分析指出由于时刻控制器软件误判MG机架状态,从而输出错误信号导致了该双夹持故障触发。为防范由于系统软件缺陷对RGL系统造成不良影响,提出两点建议措施,并可为同类双夹持故障提供技术参考,保证RGL系统的安全运行。
李辉牛亚路,李岩,王印.上风向山头对风电机组的安全性影响研究[J].南方能源建设,2021,08(04):43-49. -
![]()
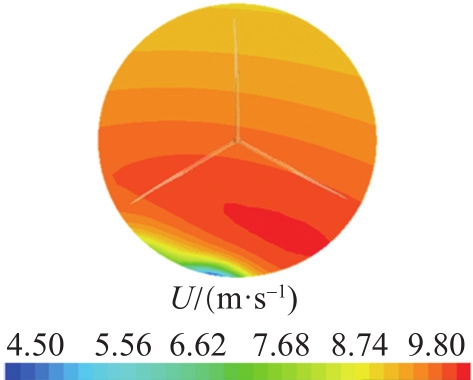
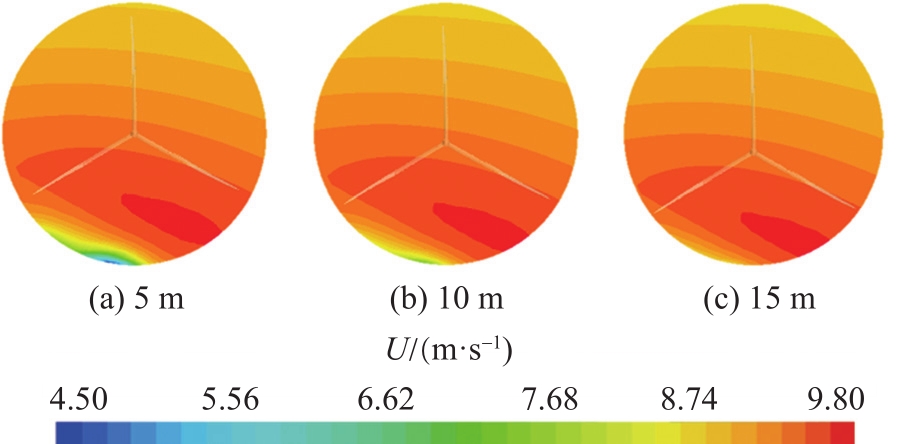
图 8 轮毂高度提升5 m 、10 m、15 m的盘面风速分布云图
Figure 8. Wind speed distribution of wind turbine rotor disk when the hub height is elevated 5 m, 10 m and 15 m
![]()
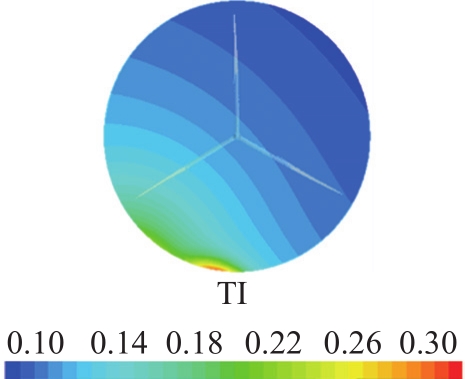
图 9 轮毂高度提升5 m、10 m、15 m的盘面湍流强度分布云图
Figure 9. Turbulence intensity distribution of wind turbine rotor disk when the hub height is elevated 5 m, 10 m and 15 m
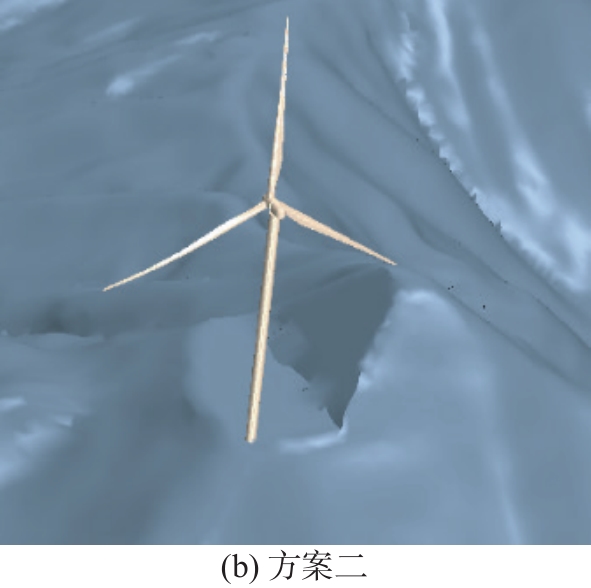
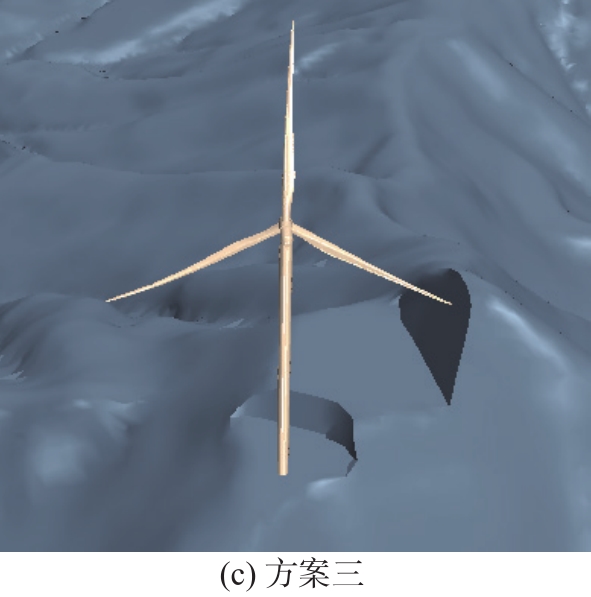
![]()
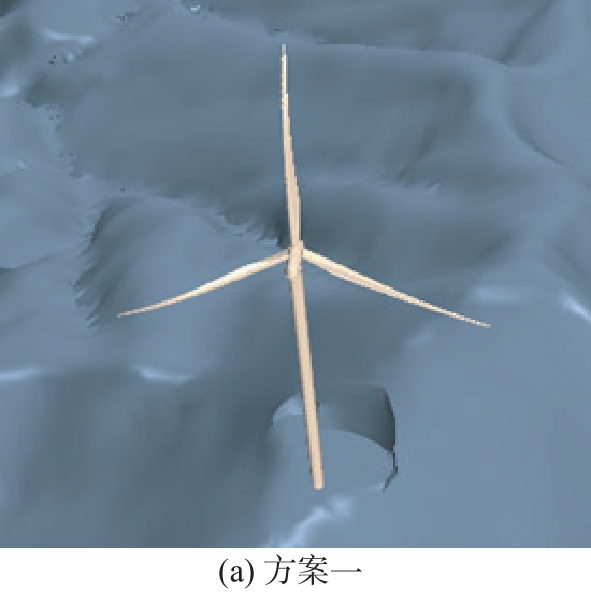
图 11 三种基础平台施工方案的盘面风速分布云图
Figure 11. Disk wind speed distribution of three wind turbine foundation platform construction schemes
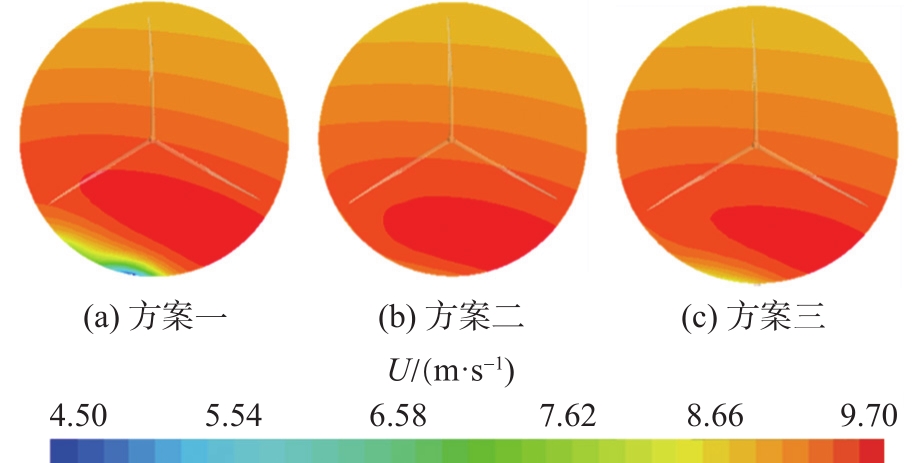
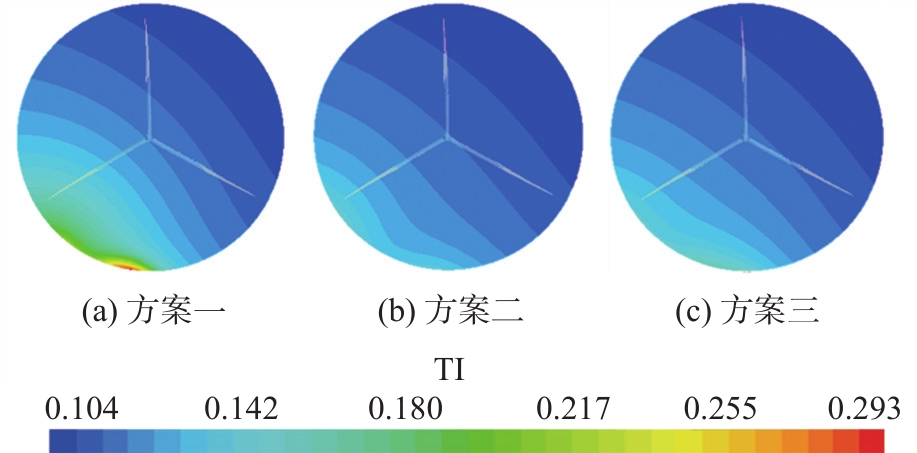
![]()
图 12 三种基础平台施工方案的盘面湍流强度分布云图
Figure 12. Disk turbulence intensity distribution of three wind turbine foundation platforms construction schemes
表 1 机型参数表
Table 1
Model parameter table 项目 参数 机组直径/m 145 塔筒高度/m 90 切入风速/(m·s-1) 2.5 切出风速/(m·s-1) 20 额定风速/(m·s-1) 8.9 最大风速/(m·s-1) 37.5 安全等级 ⅢA  下载: 导出CSV
下载: 导出CSV
表 2 叶轮盘面的速度统计
Table 2
Speed statistics of wind turbine rotor disk 方案 盘面最大风切变指数 盘面最大湍流强度 轮毂高度处风速/(m·s-1) 95 m轮毂高度 1.61 0.29 9.39 100 m轮毂高度 1.13 0.21 9.34 105 m轮毂高度 0.65 0.19 9.29 110 m轮毂高度 0.15 0.17 9.25
下载: 导出CSV
-
[1] 葛文澎, 吴迪, 苗得胜, 等. 基于CFD的复杂地形风电机组机位微地形风资源数值模拟研究 [J]. 南方能源建设, 2020, 7(1): 59-64. GEW P, WUD, MIAOD S, et al. Numerical study on wind resource around the turbine site for real complex terrain based on CFD method [J]. Southern Energy Construction, 2020, 7(1): 59-64.
[2] 左薇, 李惠民, 芮晓明, 等. 风电场典型复杂地形的数值模拟研究 [J]. 太阳能学报, 2018, 39(11): 3202-3208. ZUOW, LIH M, RUIX M, et al. Numerical simulation of typical complex terrain of wind farm [J]. Acta Energiae Solaris Sinica, 2018, 39(11): 3202-3208.
[3] ABDID S, BITSUAMLAKG T. Wind flow simulations on idealized and real complex terrain using various turbulence models [J]. Advances in Engineering Software, 2014, 75(9): 30-41.
[4] UCHIDAT, OHYAY. Numerical simulation of atmospheric flow over complex terrain [J]. Journal of Wind Engineering & Industrial Aerodynamics, 1999, 81(1): 283-293.
[5] DHUNNYA Z, LOLLCHUNDM R, RUGHOOPUTHS D. Wind energy evaluation for a highly complex terrain using computational fluid dynamics(CFD) [J]. Renewable Energy, 2017, 101(2): 1-9.
[6] LEEM, LEES H, HURN, et al. A numerical simulation of flow field in a wind farm on complex terrain [J]. Wind and Structures, 2010, 13(4): 375-383.
[7] 沈晶, 赖旭. 峡谷地形条件下风电场风况数值模拟研究 [J]. 水电能源科学, 2011, 29(8): 167-171. SHENJ, LAIX. Numerical simulation of wind flow of wind farm under valley terrain environment [J]. Water Resources and Power, 2011, 29(8): 167-171.
[8] BLOCKENB, HOUTA V D, DEKKERJ, et al. CFD simulation of wind flow over natural complex terrain: case study with validation by field measurements for Ria de Ferrol, Galicia, Spain [J]. Journal of Wind Engineering & Industrial Aerodynamics, 2015, 147(12): 43-57.
[9] 刘飞虹, 吴迪, 苗得胜, 等. 发电量预测误差受地图精度的影响分析 [J]. 南方能源建设, 2019, 6(1): 41-46. LIUF H, WUD, MIAOD S, et al. Analysis of effects of map precision on forecast error of energy production [J]. Southern Energy Construction, 2019, 6(1): 41-46.
[10] AVILAAM, FOLCHAA, HOUZEAUXAG, et al. A parallel CFD model for wind farm [J]. Procedia Computer Science, 2013, 18(5): 2157-2166.
[11] 吴联活, 张明金, 李永乐, 等. 复杂山区地形桥址区风特性的数值模拟 [J]. 西南交通大学学报, 2019, 54(5): 915-922. WUL H, ZHANGM J, LIY L, et al. Numerical simulation of wind characteristics of bridge site in complex mountainous terrain [J]. Journal of Southwest Jiaotong University, 2019, 54(5): 915-922.
[12] 曹文俊. 粗糙度长度综述 [J]. 气象, 1991(4): 45+47+37. CAOW J. A survey of roughness length [J]. Meteorological, 1991(4): 45-47+37.
[13] 叶原君. 基于RANS模型的平衡大气边界层数值模拟 [D]. 合肥: 合肥工业大学, 2018. YEY J. Numerical simulation of equilibrium atmosperic boundary layer based on RANS model [D]. Hefei: Hefei University of Technology, 2018.
[14] 张嘉荣, 程雪玲. 基于CFD降尺度的复杂地形风场数值模拟研究 [J]. 高原气象, 2020, 39(1): 172-184. ZHANGJ R, CHENGX L. Numerical simulation of wind field over complex terrain based on CFD downscaling [J]. Plateau Meteorology, 2020, 39(1): 172-184.
[15] 全国风力机械标准化技术委员会. 风力发电机组设计要求: GB/T 18451. 1—2012 [S]. 北京: 中国标准出版社, 2012. National Technical Committee of Wind Turbine Standardization. Design requirements of wind turbine: GB/T 18451. 1-2012 [S]. Beijing: China Standards Press, 2012.
-
期刊类型引用(1)
1. 唐圣学,马晨阳,勾泽. 基于时频特征融合与GWO-ELM的棒控电源早期故障状态辨识方法. 仪器仪表学报. 2023(01): 121-130 .  百度学术
百度学术
其他类型引用(0)








计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 1
