


-
随着我国经济的高速发展,我国特高压输电线路的建设已经取得飞速发展。输电线路分布点多、面广,如何及时获取遥感和摄影影像数据成为电网工程建设的一项重要工作。由于国家对空域的管制较紧,飞行前复杂的审批程序以及天气影响等诸多问题,采用载人飞机进行航空摄影测量一般周期较长。随着科技的不断发展,无人机航摄系统以其经济、便捷、高时效、高分辨率等显著特点,已广泛应用于电网工程建设,在突发灾害应急数据获取及小范围快速成图方面显示出了独特的优势。无人机不仅可以进行经典的数字航空摄影测量工作,还可进行倾斜摄影、空中360°全景摄影等。
大量试验及工程实践已经表明无人机测绘地形图的精度可以满足1:2 000地形图的要求,当测绘1:500、1:1 000大比例尺地形图时,其地面分辨率可以达到规范标准,但是高程精度及高精度可量测的正射影像图(1:500比例尺)无法满足规范要求[1,2]。
2016年,大疆精灵系列微型多旋翼无人机以其价廉物美、灵巧便携和安全稳定等特点得到用户的喜爱,其搭载传感器有效像素仅约1 200万,而低空数字航空摄影规范[4]要求“无人机所搭载传感器有效像素应不小于2 000万”,如何评估其航摄成果质量及提高其航摄工效是亟待解决的关键问题。
本文采用“智巡者”无人机低空遥感系统,结合Pix4D软件进行航线设计、地面监控、空三解析、影像镶嵌、精度分析,对滇西北至广东特高压直流输变电工程及500 kV甲湖湾电厂出线工程改线项目,重点进行了低空航摄测绘大比例尺地形图的高程精度测试分析。
-
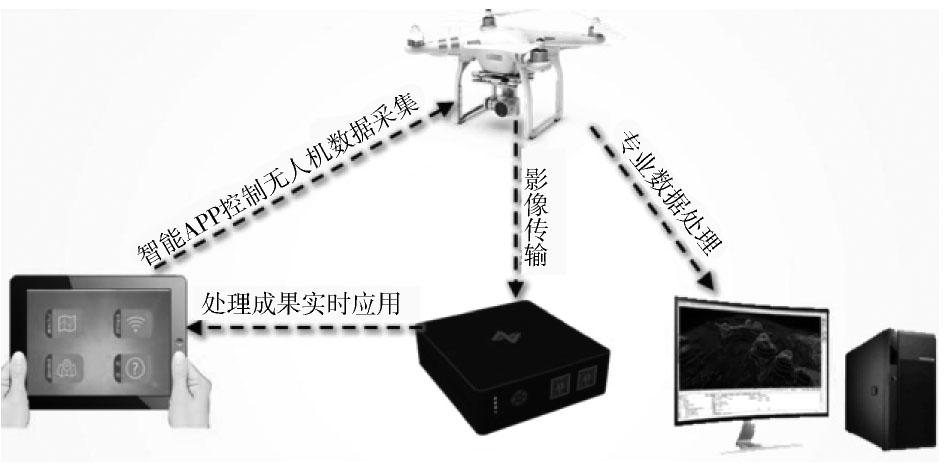
“智巡者”是由成熟的多旋翼无人机平台和软件系统构成的一套无人机低空遥感系统,其中航摄平台系统采用大疆全系列无人机(见图1),本项目采用精灵4无人机,巡航时间为23 min,巡航速度为10~15 m/s,抗风能力4级,最大飞行高度1 000 m,航摄传感器为DJ-FC300X非量测相机,等效焦距为3.61 mm,分辨率4 000像素×3 000像素。软件系统自主研发,主要由基于Android的飞行控制软件、数据处理盒子及基于Android数据应用软件等三部分构成。

图 1 “智巡者”无人机低空遥感系统
Figure 1. Esmart UAV low-altitude remote sensing system
-
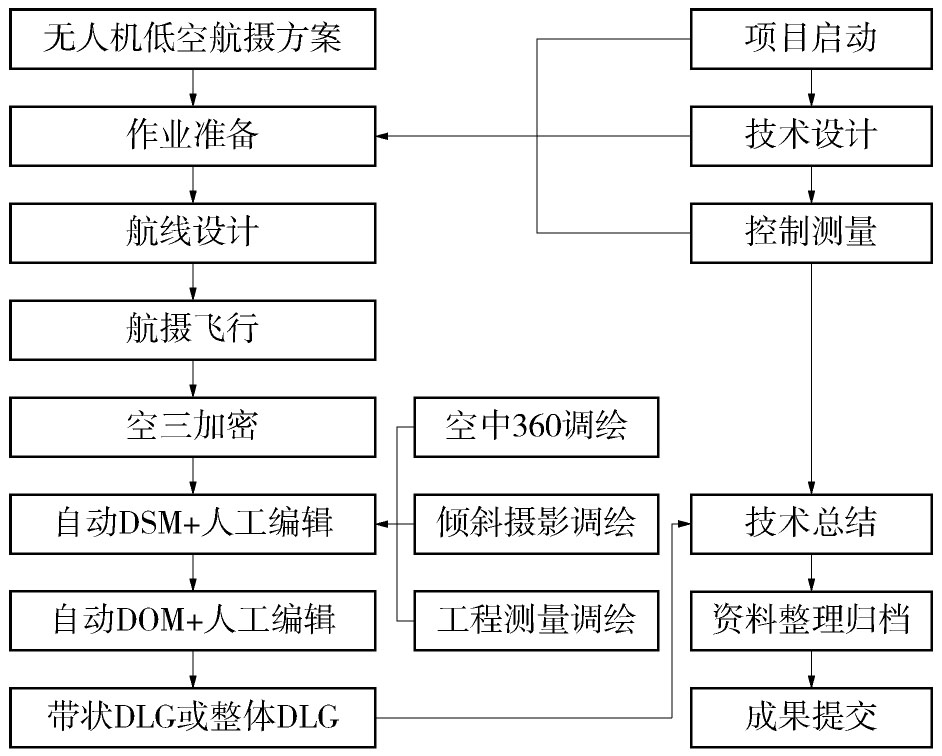
微型多旋翼无人机航摄测图的主要工作流程如图2所示。

图 2 无人机影像获取与处理流程
Figure 2. UAV image acquisition and processing process
-
测区位于博罗,宽约1.7 km,长约4 km。测区地貌既有平地,又有丘陵、山地等,植被以桉树、松杂、果园为主。
-
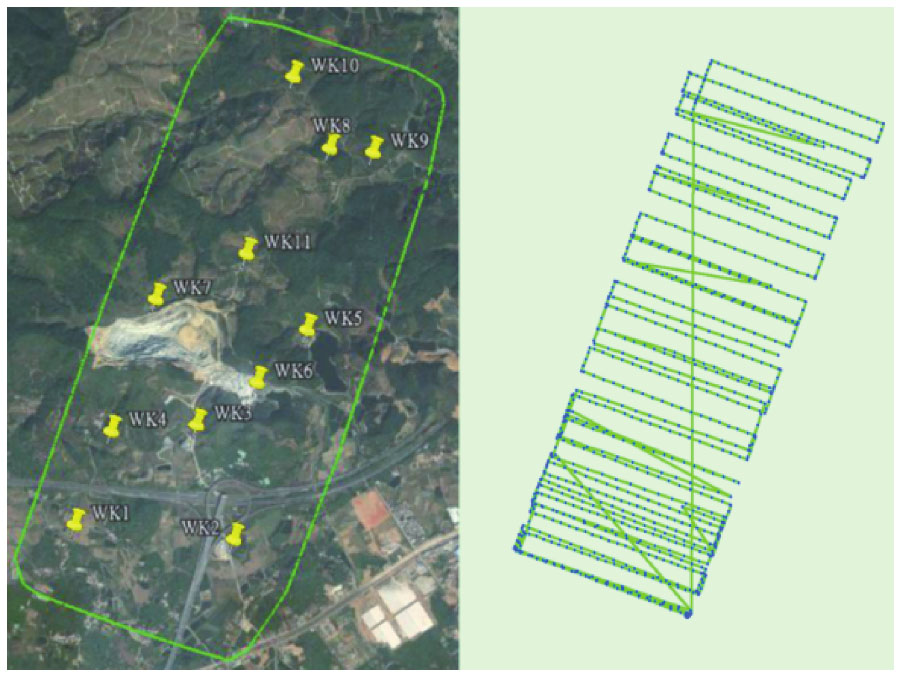
本测试按照无人机航摄测图工作流程,使用“智巡者”无人机低空遥感系统结合Google地图进行了技术设计、像控点布设、航线设计和航摄飞行,如图3所示。采用GDCORS获取了11个像控点1 980西安坐标,平面及高程精度为±2 cm。

图 3 像控点布设及航迹图
Figure 3. Ground control point & aerophoto grammetry trace
航飞实施具体情况如下:
航摄比例尺为1:2 000,航向重叠度为80%,旁向重叠度60%,地面分辨率为0.12~0.18 m,航高为250~350 m,实施航飞8个架次共采集了988张有效照片,航飞面积达6.8 km2。
-
本测试采用Pix4D软件进行数据预处理、自动空三加密、自动生成DSM、自动生成DOM。由于无人机飞行高度较低,高层地物同名点视差较大,所携带的航摄系统为小焦距非量测型相机,按照相机中心投影的成像原理,影像边缘投影误差较大,经过软件自动处理生成的DSM和DOM,由于DSM精度不足,对于地面高层建筑物无法进行真正射纠正,自动生成的DOM往往会出现接缝和建筑物边缘扭曲的现象,所以,需要对正射影像的镶嵌线进行人工编辑。
-
1)区域网空三中误差为0.15像素。
2)相机自检校误差正常。
3)像控点量测精度。依据数字航空摄影测量控制测量规范[6]1:500、1:1 000、1:2 000像控点平面中平地、丘陵误差为0.06 m、0.12 m、0.24 m,山地误差为0.08 m、0.16 m、0.32 m,高程中误差不超过基本等高距的1/10,根据表1可知本项目像控点平面残差为0.070 153 m,高程残差为0.009 247 m,满足规范[6]要求。
表 1 像控点精度统计表
Table 1.
Statistics of image control point precision GCP名称 XY/Z精度/mm X误差/m Y误差/m Z误差/m 投影误差/像素 验证/标记 WK3(3D) 0.020/0.020 0.026 0.041 0.001 0.547 31/31 WK4(3D) 0.020/0.020 0.062 -0.044 -0.010 0.613 55/55 WK5(3D) 0.020/0.020 -0.033 0.023 -0.002 0.438 56/56 WK6(3D) 0.020/0.020 -0.068 -0.019 0.021 0.577 26/26 WK7(3D) 0.020/0.020 0.023 -0.020 -0.010 0.567 32/32 WK8(3D) 0.020/0.020 0.135 0.033 0.012 0.754 42/42 WK9(3D) 0.020/0.020 -0.122 0.024 0.006 0.752 47/47 WK10(3D) 0.020/0.020 0.002 -0.003 0.001 0.555 38/38 WK11(3D) 0.020/0.020 0.022 -0.035 0.009 1.138 37/37 WK12(3D) 0.020/0.020 -0.036 -0.013 0.001 0.706 45/45 WK2(3D) 0.020/0.020 -0.019 0.006 -0.002 0.396 72/72 Mean / -0.000 838 -0.000 681 0.002 305 / / Sigma / 0.064 771 0.026 928 0.008 955 / / RMS Error / 0.064 776 0.026 936 0.009 247 / / -
基于500 kV甲湖湾电厂出线工程改线项目工测数据,对无人机航测成果和滇西北至广东特高压直流输变电工程激光雷达DEM成果(2014年底)进行质量评估,对每个工测数据基于无人机DSM与激光DEM分别内插得到高程,对比统计结果见表2。
表 2 基于工测数据高程比对统计表
Table 2.
Statistics of elevation contrast based on engineering survey data 分布范围 工测高程-无人机航测高程 工测高程-激光高程 高差/m 高程点/个 比例/% 高差/m 高程点/个 比例/% 空旷、裸露地表 0~1 157 35.04 0~1 407 90.85 10 m范围内有稀疏、低矮植被的裸露地表等 1~2 99 22.10 1~2 24 5.36 低于5 m的稀疏、低矮植被及低矮居民地区域 2~5 144 32.14 2~5 12 2.68 高大植被及建构筑物 5~18 48 10.71 5~11 5 1.12 / 合计 448 100 合计 448 100 根据表2统计结果进行分析发现:
1)由于激光点可穿透稀疏植被至地面,导致激光雷达DEM成果高程精度远优于无人机DSM成果高程精度。
2)工测和无人机的高程差值与植被厚度密切相关。
-
激光雷达DEM成果经过大量工程工测数据验证,满足机载激光雷达数据处理技术规范[7]要求,可作为无人机航测高程精度评估标准。
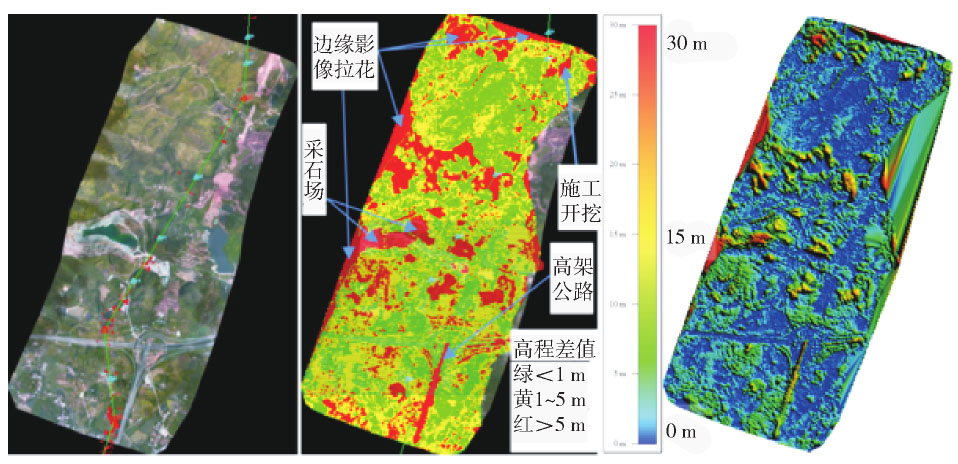
在整个测区内按间隔10 m生成格网点,共57 672个点。对每个格网点基于无人机DSM与激光DEM分别内插得到高程,对比统计结果见表3和图4。

图 4 工测数据(图左)、激光DEM与无人机DSM高程比对(图中&图右)
Figure 4. Engineering surveying data (left image) and Lidar DEM & UAV DSM elevation check(middle image & right image)
表 3 基于激光DEM点云数据高程比对统计表
Table 3.
Statistics of elevation contrast based on lidar DEM data 分布范围 高差/m 高程点/个 比例/% 中误差/m 空旷、裸露地表 0~1 20 310 35.22 高差0~1m:0.53 10 m范围内有稀疏、低矮植被的裸露地表和水面等 1~2 9 775 16.95 高差0~2m:0.95 低于5 m的稀疏、低矮植被及低矮居民地区域 2~5 14 654 25.41 高差0~5m:2.08 高大植被及建构筑物、开挖场地、山地密林测区边缘 5~25 11 716 20.31 高差0~25m:5.48 山地密林测区边缘、开挖场地(采石场、在建高速) 25~158 1 217 2.11 高差0~158m:10.57 / 合计 57 672 100 / 剔除采石场开挖、高速公路开挖、高架高速等人工建构筑物、山地边缘区域等因素影响,高程差值与植被厚度密切相关。
依据低空数字航空摄影测量内业规范[5]数字线划图(B类)精度要求,1:500、1:1 000、1:2 000山地高程注记点精度要求中误差分别为0.7 m、1.2 m和2.5 m。根据表1统计结果进行分析发现:
1)结合DOM影像分析,山地密林测区边缘及影像拉花处,无人机航测高程数据易出现异常,该部分数据应剔除。
2)测区范围内有高大植被及建构筑物时,应对该区域进行调绘、现场工测或立体量测等方式,进行DEM精细编辑,当该区域DEM编辑后的高程中误差小于2.5 m,可确保满足1:2 000数字线划图(B类)的高程精度要求。
3)测区范围内有低于5 m的稀疏、低矮植被及低矮居民地区域时,宜对该区域进行调绘及进行DEM编辑,当该区域DEM编辑后的高程中误差小于1.2 m,可确保满足1:1 000数字线划图(B类)的高程精度要求。
4)测区范围内植被稀疏、低矮时,宜对该区域进行调绘及进行DEM编辑,当该区域DEM编辑后的高程中误差小于0.7 m,可确保满足1:500数字线划图(B类)的高程精度要求。
-
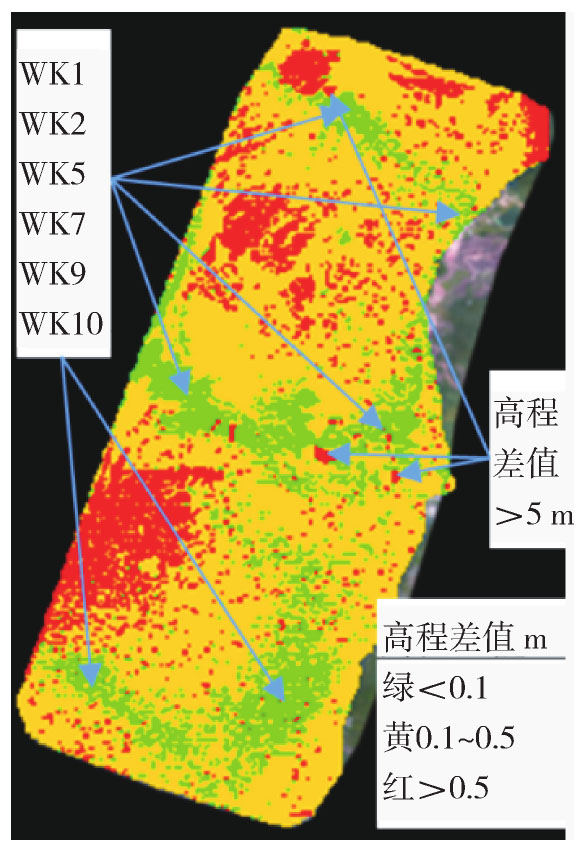
无人机航测像幅小,相片数量大,依照现行规范,需要布设大量的野外控制点。为提高无人机航测工效,研究稀少像控点的布设方法是一条重要途径。基于本次航测数据,特将像控点删减为6个点,然后重新自动计算获得DSM_6。按照上述方法,对像控点为11个点自动计算获得DSM_11进行比较,共计高程点57 665个,对比统计结果见图5和表4。

图 5 DSM_6与DSM_11高程比对
Figure 5. DSM_6 & DSM_11 elevation check
表 4 基于稀少像控点布设方法高程质量评估统计表
Table 4.
Statistics of elevation quality evaluation based on exiguity control points design method 分布范围 高差/m 高程点/个 比例/% 中误差/m 像控点周围及像控点间带状区域裸露地表。 0~0.1 18 221 31.60 / / 0.1~0.5 34 668 60.12 / / 0,5~1 3 805 6.60 / DSM_6与DSM_11零点差异,内插计算高程点出现差异;密林厚度变化越大,内插高程差异越大。 1~2 741 1.29 高差0~2 m:0.31 / 2-17 230 0.40 高差0~17 m:0.44 / 合计 57 665 100% / 根据表4统计结果分析发现:
1)像控点周围及像控点间带状区域裸露地表DSM_6与DSM_11高程差值很小。
2)由于DSM_6与DSM_11零点不一致,导致内插计算格网点高程出现高程差值,高程差值与植被厚度变化大小密切相关,高程差值2 m以上的高程点基本位于密林区域,高程差值5 m以上的高程点基本位于桉树林区域。
3)删减控制点前后,测区DSM高程差值中误差为0.44 m,如果忽略测区植被覆盖区域影响,则测区DSM高程差值中误差为0.31 m,远小于规范[5]1:2 000数字线划图(B类)的高程精度要求1/3,根据误差传播理论,删减控制点前后对测区DSM高程质量的影响可忽略不计。
-
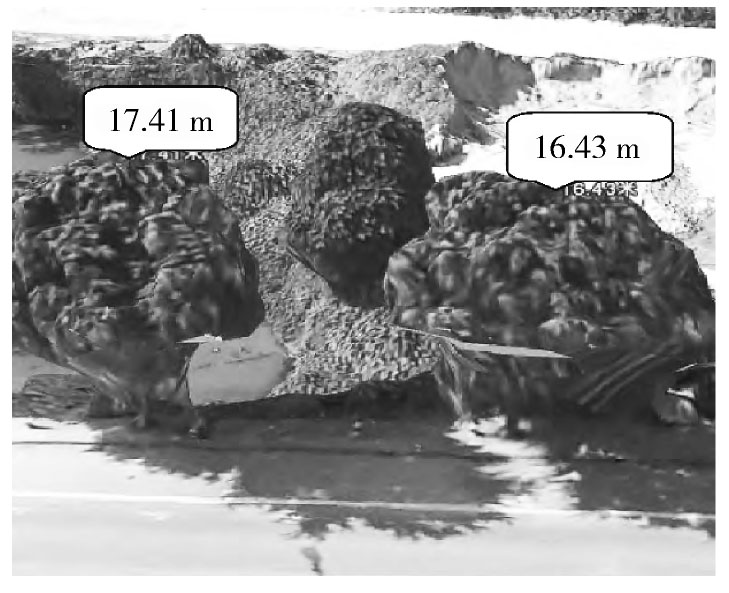
倾斜摄影技术能够从不同角度对地面系统的物体进行全方位拍摄,通过配套软件可直接利用成果影像进行高度、长度、面积、体积、角度、坡度等属性的量测[2]。空中360全景摄影技术把传感器环球形拍摄的一组或多组照片拼接成一个全景图像,能为用户提供超大视角浏览的球形全景图。它具有数据获取简单、建模速度快、真实感强、交互性能好等优点。
基于倾斜摄影技术和空中360全景摄影,对沿线带状区域植被及建构筑物进行快速调绘,采用自动生成的数字表面数据(DSM),对植被覆盖区域及建构筑物进行局部人工编辑,得到带状DEM数据。

图 6 树高量测
Figure 6. Tree height measurement

图 7 房屋高度量测
Figure 7. Height measurement of building
-
采用DSM数据,套合立体模型数据,对植被覆盖区域及建构筑物进行人工编辑,使点位切准地面,得到DEM数据。
-
采用立体像对量测的方式,对局部DOM变形较大区域的建构筑物进行人工编辑,使点位切准建构筑物地面特征点,得到DLG数据。
-
多旋翼无人机续航时间短,相同距离无人机耗电量垂直起降一般约为水平位移的3倍,因此,起降点宜优先考虑测区附近且易于到达的高点,其次考虑每架次摄区的角点附近,以减少非航摄作业期间的电量损耗。
-
在测区四周拐点或边缘均匀布设像控点,点间距离不大于1.5 km,每平方公里不少于1个点,最少4个点;像控点采用实地选点或实地造靶标方式,确保影像清晰,易于判刺和立体量测,精度满足规范[6]要求;同时,加大像片重叠度设计,航向宜不小于80%,旁向宜不小于60%,提高立体模型的联结强度。
-
由于载人飞机航测审批等原因一般周期较长,为便于设计人员进行线路路径优化,尽量避免补飞,载人飞机航测带宽通常规定为2.3~3 km,通过大量的工程实践证明,该规定对载人飞机航测是适宜的。而无人机航测方便快捷,当局部需要补飞时,无人机可及时响应。结合工程实践,航测带宽可适当下调为1.5~2.0 km,在保障设计人员进行线路路径优化时,提高航测工效。
通过上述措施,可确保每架微型多旋翼无人机线路航测工效达到7~10 km/d。当采用机群作业方式时,可进一步提高航测工效。
-
通过工程实践,微型多旋翼无人机航摄成果质量可满足1:2 000地形图测绘的要求,在植被稀疏、低矮的丘陵地区及山地可满足1:1 000测图要求和1:5 000/1:500线路平断面图测量的精度要求,完全可以满足输电线路优化选线以及平断面图数据采集的要求;同时,采用稀少像控点布设方法可大幅提高微型多旋翼无人机工效;采用倾斜摄影和空中360技术对测区局部高大植被进行快速调绘+实地工测的方法,经局部DSM编辑后,可有效提高无人机DSM质量,有利于无人机技术在特高压输电线路勘测中的推广应用。
Application Research on UHV Transmission Line Survey Based on Unmanned Aerial Vehicle
-
摘要:
随着无人机技术的发展,采用无人机进行线路勘测将成为一种趋势。但微型多旋翼无人机搭载传感器有效像素仅约1 200万时,如何评估其航摄成果质量及提高其工效是亟待解决的问题。针对上述问题,基于特高压线路输电线路工程机载激光DEM数据和工测数据,对微型多旋翼无人机线路勘测数据的质量进行了评估,对其作业方法进行了改进。实践证明文章所提出的作业方法能为特高压输电线路勘测提供便携、可靠及高效的数据采集方式。 Abstract:With the development of UAV technique, it has become a trend to use it for transmission survey. However, it is important how to evaluate the survey quality and efficiency of UAV with 12 million pixel sensor. According the above problems, compared with the lidar data and engineering surveying data of a practical project of UHV transmission line, the quality of UAV data has been evaluated and the work method of UAV has been improved. Practice has proved that the improving method can offer a convenient, reliable, efficient way to gather data for UHV transmission line survey. -
Key words:
- UAV /
- quality /
- UHV transmission line /
- survey
-
图 4 工测数据(图左)、激光DEM与无人机DSM高程比对(图中&图右)
Fig. 4 Engineering surveying data (left image) and Lidar DEM & UAV DSM elevation check(middle image & right image)
表 1 像控点精度统计表
Tab. 1.
Statistics of image control point precision GCP名称 XY/Z精度/mm X误差/m Y误差/m Z误差/m 投影误差/像素 验证/标记 WK3(3D) 0.020/0.020 0.026 0.041 0.001 0.547 31/31 WK4(3D) 0.020/0.020 0.062 -0.044 -0.010 0.613 55/55 WK5(3D) 0.020/0.020 -0.033 0.023 -0.002 0.438 56/56 WK6(3D) 0.020/0.020 -0.068 -0.019 0.021 0.577 26/26 WK7(3D) 0.020/0.020 0.023 -0.020 -0.010 0.567 32/32 WK8(3D) 0.020/0.020 0.135 0.033 0.012 0.754 42/42 WK9(3D) 0.020/0.020 -0.122 0.024 0.006 0.752 47/47 WK10(3D) 0.020/0.020 0.002 -0.003 0.001 0.555 38/38 WK11(3D) 0.020/0.020 0.022 -0.035 0.009 1.138 37/37 WK12(3D) 0.020/0.020 -0.036 -0.013 0.001 0.706 45/45 WK2(3D) 0.020/0.020 -0.019 0.006 -0.002 0.396 72/72 Mean / -0.000 838 -0.000 681 0.002 305 / / Sigma / 0.064 771 0.026 928 0.008 955 / / RMS Error / 0.064 776 0.026 936 0.009 247 / /  下载: 导出CSV
下载: 导出CSV
表 2 基于工测数据高程比对统计表
Tab. 2.
Statistics of elevation contrast based on engineering survey data 分布范围 工测高程-无人机航测高程 工测高程-激光高程 高差/m 高程点/个 比例/% 高差/m 高程点/个 比例/% 空旷、裸露地表 0~1 157 35.04 0~1 407 90.85 10 m范围内有稀疏、低矮植被的裸露地表等 1~2 99 22.10 1~2 24 5.36 低于5 m的稀疏、低矮植被及低矮居民地区域 2~5 144 32.14 2~5 12 2.68 高大植被及建构筑物 5~18 48 10.71 5~11 5 1.12 / 合计 448 100 合计 448 100
下载: 导出CSV
表 3 基于激光DEM点云数据高程比对统计表
Tab. 3.
Statistics of elevation contrast based on lidar DEM data 分布范围 高差/m 高程点/个 比例/% 中误差/m 空旷、裸露地表 0~1 20 310 35.22 高差0~1m:0.53 10 m范围内有稀疏、低矮植被的裸露地表和水面等 1~2 9 775 16.95 高差0~2m:0.95 低于5 m的稀疏、低矮植被及低矮居民地区域 2~5 14 654 25.41 高差0~5m:2.08 高大植被及建构筑物、开挖场地、山地密林测区边缘 5~25 11 716 20.31 高差0~25m:5.48 山地密林测区边缘、开挖场地(采石场、在建高速) 25~158 1 217 2.11 高差0~158m:10.57 / 合计 57 672 100 /
下载: 导出CSV
表 4 基于稀少像控点布设方法高程质量评估统计表
Tab. 4.
Statistics of elevation quality evaluation based on exiguity control points design method 分布范围 高差/m 高程点/个 比例/% 中误差/m 像控点周围及像控点间带状区域裸露地表。 0~0.1 18 221 31.60 / / 0.1~0.5 34 668 60.12 / / 0,5~1 3 805 6.60 / DSM_6与DSM_11零点差异,内插计算高程点出现差异;密林厚度变化越大,内插高程差异越大。 1~2 741 1.29 高差0~2 m:0.31 / 2-17 230 0.40 高差0~17 m:0.44 / 合计 57 665 100% /
下载: 导出CSV
-
[1] 陈姣. 无人机航摄系统测绘大比例尺地形图应用研究 [D]. 昆明:昆明理工大学,2013. [2] 赵明泽,申兴旺,郭明,彭江帆. 基于低空摄影测量的高精度数字正射影像图生成 [J]. 工程勘察,2016(4):46-50. ZHAO Mingze, SHEN Xingwang, GUO Ming, PENG Jiangfan.The generation of high-precision digital orthophoto maps based on the low altitude photogrammetry [J] .Geotechnical Investigation & Survey, 2016(4) : 46-50. [3] 汤坚,杨骥. 无人机倾斜摄影技术在特高压输电线路路径优化中的应用研究 [J]. 南方能源建设,2015, 2(Supp.1): 203-206. TANG Jian, YANG Ji. Research and application of UHV transmission line optimization based on oblique photography of UAV [J]. Southern Energy Construction, 2015, 2(Supp.1): 203-206. [4] 国家测绘局. 低空数字航空摄影规范:CH/Z 3005—2010 [S]. 北京:测绘出版社,2010. [5] 国家测绘局. 低空数字航空摄影测量内业规范:CH/Z 3003—2010 [S]. 北京:测绘出版社,2010. [6] 国家测绘局. 数字航空摄影测量控制测量规范:CH/Z 3006—2010 [S]. 北京:测绘出版社,2011. [7] 国家测绘局. 机载激光雷达数据处理技术规范:CH/T 8023—2011 [S]. 北京:测绘出版社,2011. -

 点击查看大图
点击查看大图
计量
- 文章访问数: 184
- HTML全文浏览量: 159
- PDF下载量: 19
- 被引次数: 0
