


-
电网运维是电网安全运营的一项重点工作,电网运维管理部门通过进行定期的输电线路巡检工作,可以及时发现线路通道中的安全隐患和缺陷,并及时进行排查,以降低事故或意外发生的概率。我国传统的电力巡检方式主要为人工巡检,但由于其工作量大、条件艰苦,且巡检效率低,在电网运维电力巡检市场中的占有率逐渐下降[1]。目前,随着科技的发展,机载技术日趋成熟,逐渐在电力巡检中取得成效并得到广泛应用。由于传统人工巡检依靠人眼观察安全隐患,无法对输电线路和线路走廊地物之间进行精确的空间距离测量,激光雷达(LiDAR)作为一种激光探测和测距系统,弥补了电力巡检中对于获取空间几何结构信息的需求[2]。
LiDAR具有空间定位、量测精度高、巡检效率高的优势,通过LiDAR及地面控制测量技术可以获取地理空间三维信息,同时结合机载平台的优势,机载LiDAR系统在电力巡检中逐渐成为主流巡检方式之一,其应用遍及输电线路走廊地物的安全距离检测[3]、线路通道三维重建[4]等诸多方面。应用机载LiDAR技术可以高效率、高精度、安全快速地实现电网线路通道巡视工作,主要包括树障检测工作、地物危险点的检测、线路交叉跨越情况统计分析。同时,高精度的激光点云可以支撑通道内的电网资产的三维建模工作。
本文以机载激光应用到肇庆供电局架空输电线路巡检工作为例,阐述其在电网运维应用中的所使用关键技术,并对机载LiDAR在电力巡检中的优势和应用前景进行了分析和展望。
-
机载LiDAR系统集成了激光测距设备、GNSS设备和IMU惯导设备等,以飞行平台为载体,通过对地面进行扫描,记录目标的姿态、位置和反射强度等信息,获取地表三维信息的技术[5]。激光扫描器向地面发射激光,激光遇到障碍物便会进行信号反射,传感器通过记录反射能量时间,就可记录激光至地面或者物体表面的距离D,如式(1):
((1)) 式中:c为光速;T为发射时间和接收时间之差。
本次项目实施所采用飞行平台是S-76型号直升机,所使用的激光扫描设备是RIEGL扫描鹰HS-1600激光扫描仪系统。
-
由于项目实施规模达上千公里,所以采用了效率更高的直升机为飞行平台进行数据采集。与固翼飞机相比,直升机的稳定性、飞行效率以及续航时间更有优势,可以保持长时间低空匀速飞行,且在空域申请方面,直升机的申请渠道比无人机的申请渠道更为成熟、透明,适用区域更为广阔。同时,采用直升机作为飞行平台,能够保持相对较高的有效飞行速度以尽量减少飞行时间,提高飞行效率,并能够保证采集到的点云密度满足数据应用需求。本次研究采用的飞行平台S-76型号直升机的参数如表1所示。
表 1 S-76技术参数
Table 1.
Technical parameters of S-76 参数 指标 机身长度/m 13.22 机身宽度/m 2.13 机身高度/m 4.52 主旋翼长度/m 13.41 自重/kg 2 540 最大起飞重量/kg 4 670 最大飞行时间/h 4 最快飞行速度/(km·h-1) 287 -
扫描鹰HS-1600是一款高精度测绘级LiDAR系统,可高精度、快速获取带有精确地理坐标的高密度、高质量点云数据。HS-1600的扫描距离可达1 350 m,扫描速度可达82万点/s,扫描视角达330°,可轻松获取峡谷山体等侧面点云数据。产品技术参数如表2所示。
表 2 HS-1600技术参数
Table 2.
Technical parameters of HS-1600 参数 指标 视场角/(°) 最大330,可自行调节 脉冲发射频率/kHz 最大820,可自行调节 测距精度/mm 15 mm(@150 m) 最大测距范围/m 1 350 回波探测 无穷次回波 扫描带宽/m 476.8 俯仰/侧滚角精度/(°) 0.015 旋偏精度/(°) 0.035 高程定位精度/m 0.1 -
项目执行位于肇庆市内,线路总长度为1 000 km。为了保证LiDAR数据获取的相对精度,采用航空面状扫描飞行的方式进行数据采集。由于本次研究围绕电力巡检,数据获取不需要考虑影像的采集,因而在没有影像重叠度要求的限制下,相对航高及飞行速度的限制条件减少,在以确保获取的LiDAR点云密度满足后期数据应用的前提下,本次研究设计的飞行方案为:飞行高度离地面100 m,飞行速度为90 km/h,获取的LiDAR数据点云密度平均为65点/m2,如表3所示。
表 3 输电线路航飞技术参数表
Table 3.
Flight technical parameter table for transmission line 参数 指标 相对航高/m 100 飞行速度/(km·h-1) 90 Lidar数据点密度/(点·m-2) 65 航线总长度/km 1 000 -
应用地面控制测量技术,布设9个地面控制点,并与直升机开展同步观测。根据设计的飞行方案,实施航飞过程,应用机载LiDAR技术,对指定宽度内的目标开展激光扫描、地物测绘、植被调查和通道调查测绘,采集地理参考资料。
机载LiDAR系统采集的线路通道点云含有多类目标,包括电力线路的杆塔、架空线路、连接的变电站等输电设施,以及位于电网通道走廊环境的植被、建筑物、道路、水系等目标地物。
-
通过数据预处理得到原始LiDAR点云数据后,输电线路扫描数据分析之前,需要对原始LiDAR点云数据进行分类,分类之后的数据才能进行安全距离检测及不同工况模拟等应用。
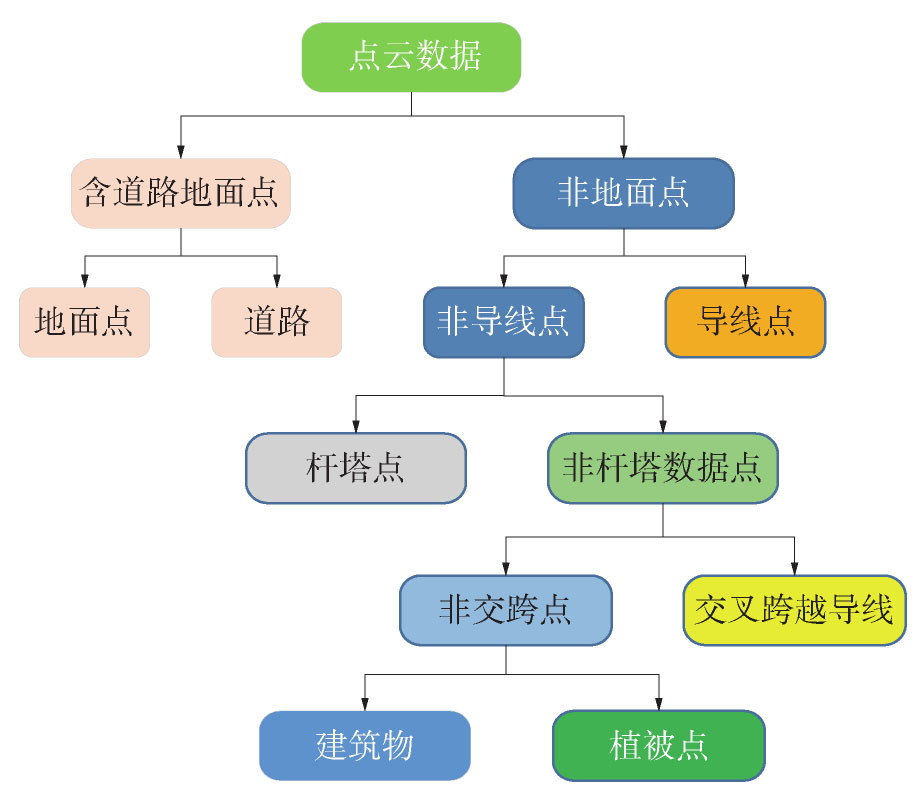
本文首先依据已知的线路位置与走向对机载LiDAR系统采集的点云数据进行裁剪,获得线路走廊区域点云。再从原始点云数据中分离出地面点、导线点、杆塔点、植被点、建筑物点等地物点,为进一步的数据分析与应用做准备。
通过点云分类软件中自动化提取算法模块,采用数据并行处理方式,可快速完成区段数据的类别提取。同时数据分类对后续的数据分析的准确性具有明显关联性,因此要求自动化分类准确度需要达到较高的分类精度。分类策略通过测试采用二分法逐类提取实现,采用二分法不仅能有效减少数据量,同时对软件运行稳定性、数据处理效率等都有较大优势。点云分类的整体流程如图1所示。

图 1 点云自动分类作业流程图
Figure 1. Workflow of point cloud automatic classification
本文通过采用不规则三角网渐进加密技术、基于导线形态的自动追踪技术、杆塔几何形态迭代查询技术等实现对地面、导线、铁塔、植被、通道内建筑物、交叉跨越导线、交叉跨越道路等主要类型数据的高精度提取。最后在分类结果中可能存在误判点云数据,通过人工交互编辑手段对这类数据纠正。
-
人工巡检作为电力巡检的一种传统方式,不仅劳动强度大,在作业时存在一定的危险,且难以在处于深沟峡谷等复杂地形环境的线路中开展。同时,由于人工巡检方式主要为使用手持测距仪或人工经验判读,在巡视过程中存在盲区,很有可能遗漏安全隐患,误差率也因人而异。利用机载LiDAR系统采集和处理输电线路走廊数据,可以对线路走廊情况进行彻底排查,突破复杂地形对巡线的局限,提高电力巡检的效率,且因LiDAR设备的空间定位精度高,电力线、植被、建筑物等地物的位置可以被精确探测,还可量测导线的对地距离、导线间距、导线与植被间距离,以及进行交叉跨越检测分析、树木倒伏分析等,可获知当前工况下通道隐患危险点位置,以便运维人员及时开展整改与维修工作。此外,利用安装在杆塔上的温度、风速等监控设备,记录不同工况条件,通过电气计算模型,可以将瞬时工况下的导线模拟到特定工况下导线弧垂的变化情况,以便对线路进行有效的运维和管理[6]。
进行LiDAR数据分析与应用前,首先要对导线进行拟合,导线弧垂拟合采用悬链线方程,在导线所在平面以导线最低点为原点建立x、y坐标系,则导线的斜抛物线方程为式(2):
((2)) 式中:φ为高差角,即同一档距两悬挂点连线与水平面的夹角;g为比载;σ0为水平应力。
-
据研究统计,在南方五省80%以上的电力事故是由植被生长引起的,当植被与架空线路的净空距离(空间直线距离)小于安全阈值,在特定天气条件下,容易引致电力线放电,造成电网运行安全事故,造成巨大的经济损失[7,8]。为保证输电线路的安全运营,输电线路运营期间,需对电缆与其它物体间的距离进行量测计算,并参考电缆铺设的技术要求和行业规范,对量测结果进行分析,并结合环境因素,做出评价与预警。例如对树木的生长高度进行预测,以制定树木砍伐计划,从而避免因树木生长过高而导致与输电线路的碰触危险[9]。
利用机载LiDAR系统采集的点云数据进行缺陷分析,可以识别导线下方及周边的位于通道走廊内的植被是否超过安全高度,分析结果含有绝对地理坐标,便于运维人员对超限植被进行清理,保证输电线路安全。降低事故发生率,减少经济损失。
-
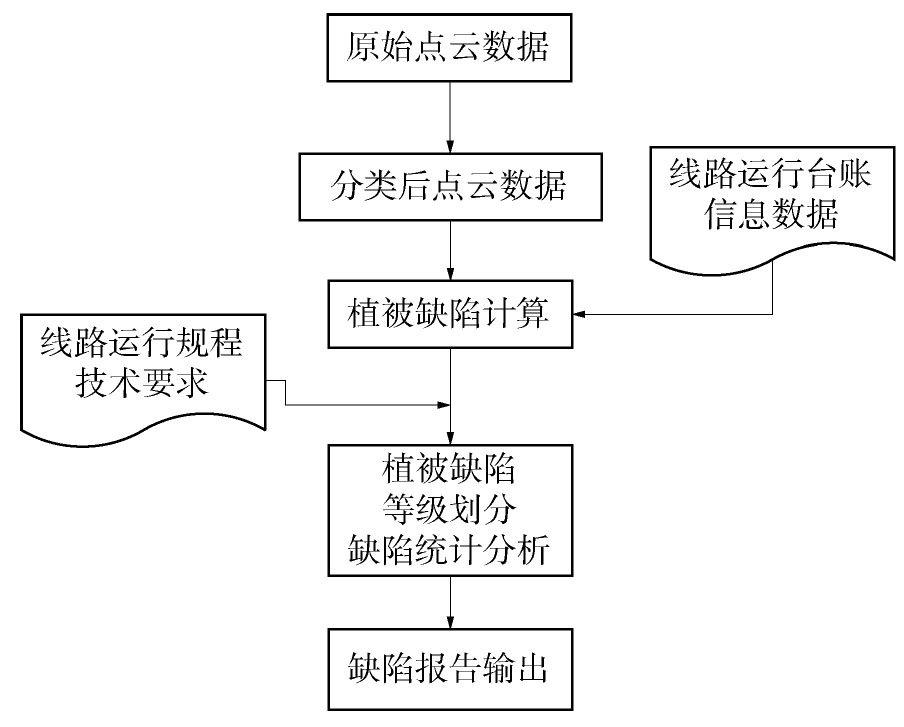
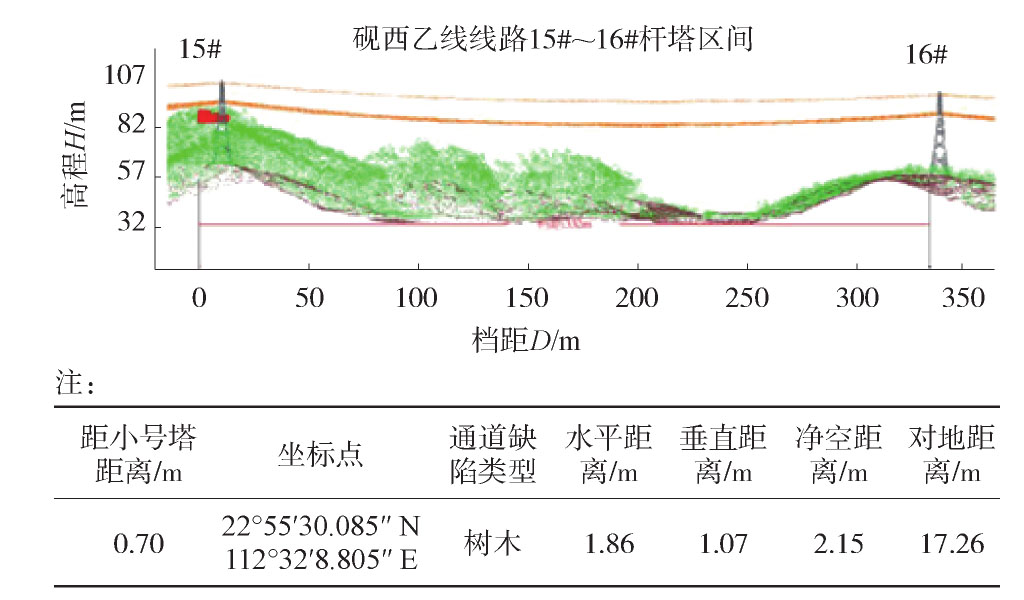
实时工况缺陷分析流程如图2所示,通过载入线路走廊的植被点云、杆塔点云,导地线点云,线路走廊建筑物点云、道路点云等数据,利用KDTREE算法过滤掉不符合最大规程范围的非导线点云数据,获取符合条件的点云,对这些缺陷点进行净空距离计算,找出符合规程的缺陷点。再其次按照危险等级对所有缺陷点进行聚类分析,取出最符合规程条件的特征点,最后对分析出来的缺陷点合成报告,如图3所示。

图 2 实时工况缺陷分析流程图
Figure 2. Flow chart of defect analysis under scanning working condition

图 3 实时工况缺陷分析报告
Figure 3. Inspection report for scanning working condition
-
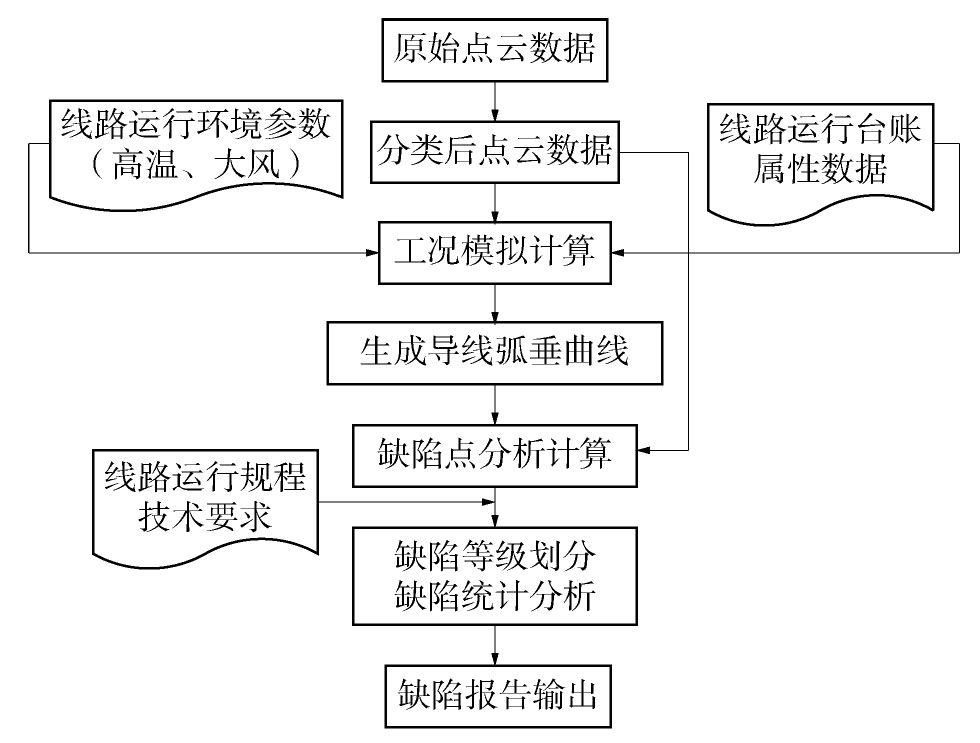
实现不同工况(高温、大风)下弧垂变化情况分析,从而发现潜在的安全距离超限地物。不同工况缺陷分析流程图如图4所示。

图 4 不同工况缺陷分析流程图
Figure 4. Flow chart of defect analysis under different working conditions
进行不同工况模拟分析,首先需要计算导线的自重比载,再通过电流、导线型号、风速、温度、导线分裂数、线路运行时间、电压等级、最大风速、最大电流值等参数信息进行模拟分析,如式(3):
((3)) 式中:g1为导线的自重比载;m0为每公里导线的质量;S为导线截面积。
-
由于温度越高,导线弧垂变化越大,与地面间距离越近,因此需要开展高温模拟分析工作,以获知在不同温度条件下线路走廊的隐患点情况。
电力导线所受温度、荷载及相应的水平应力σ0和弧垂f会随着气象条件变化而变化。水平应力的变化规律可用式(4)所示的导线状态方程来描述。
((4)) 式中:gm为初始气象条件下的比载;gn为待求气象条件下的比载;tm为初始气象条件下的温度;tn为待求气象条件下的温度;σm为在温度tm和比载gm时的应力;σn为在温度tn和比载gn时的应力;α为线温度线膨胀系数;E为导线的弹性系数;φ为导线悬挂点高差角;l为档距。
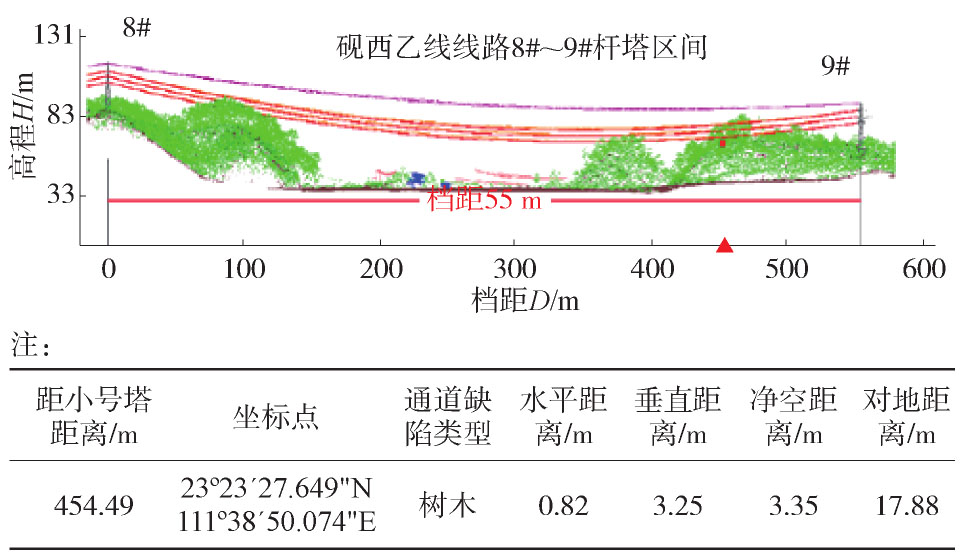
利用分析软件,通过设置导线设计最大温度,进行高温模拟分析,得到的缺陷报告如图5所示。

图 5 高温工况缺陷分析报告
Figure 5. Inspection report for high temperature working condition
-
导线受风力影响发生风偏,如舞动、弧垂等,常常会造成线路跳闸、导线电弧烧伤、断股、断线等严重后果,且风偏的发生常伴有大风和雷雨现象,以致运维人员难以判断及查找故障所在。
无冰时作用在导线上每平方毫米的风压荷载称为无冰时风压比载,可按式(5)计算。
((5)) 式中:g4为无冰时风压比载;C为风载体系数;v为设计风速;d为导线直径;S为导线截面积;a为风速不均匀系数。
无冰有风时,作用在导线垂直方向的比载为g1,作用在导线水平方向的比载为g4,按向量合成可得综合比载为g6,可按式(6)计算得到。
((6)) 利用分析软件,通过模拟大风环境下风偏情况,根据风向、最大风速,用上述风偏模型对线路进行风偏模拟计算。通过大风模拟分析后得到的缺陷报告如图6所示。

图 6 大风工况缺陷分析报告
Figure 6. Inspection report for high wind working condition
-
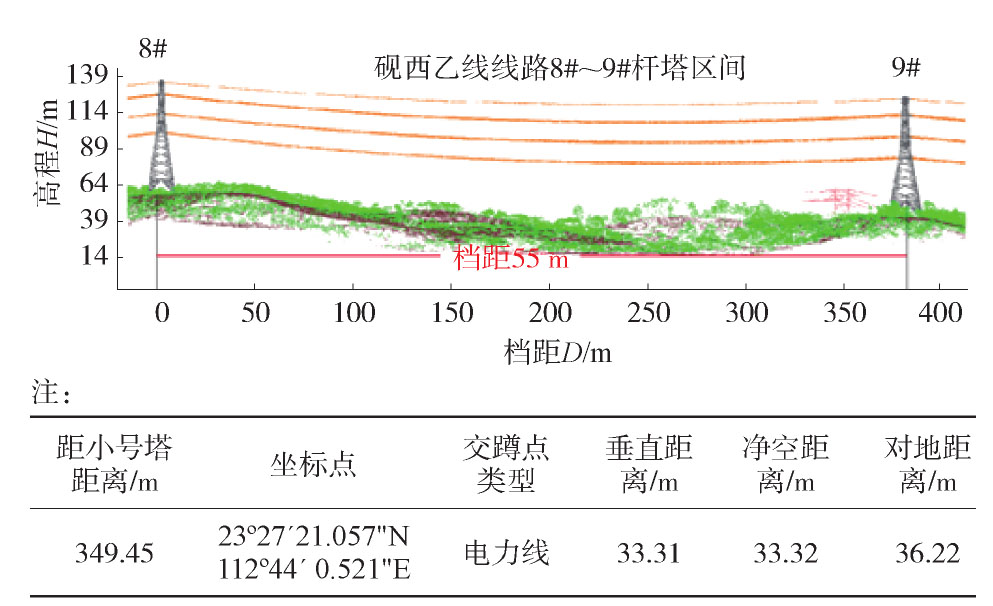
交叉跨越检测属于资产管理统计,原理是将电力线投影到平面后检测其是否与其他地物之间存在交叉跨越。根据地物类型的不同,交跨类型主要分为电力线、公路、植被、建筑物、水系等。本文基于分类后的点云,开展交叉跨越分析,提取交叉跨越点以及该点到电力线的垂直距离、净空距离和对地距离,形成交跨分析报告,如图7所示。并对报告进行整理,形成规范统一的专题报告。

图 7 交叉跨越检测分析报告
Figure 7. Cross-over inspection analysis report
-
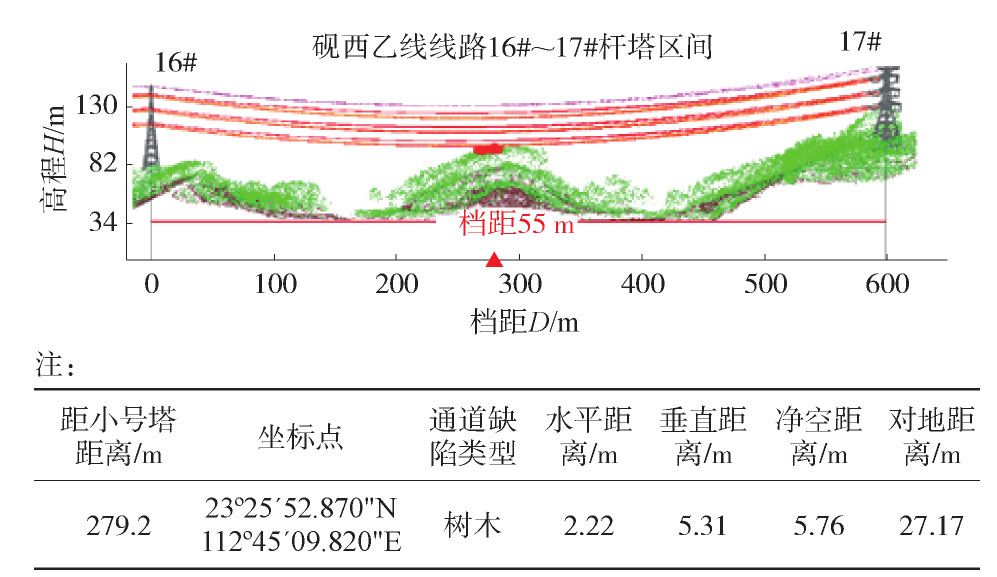
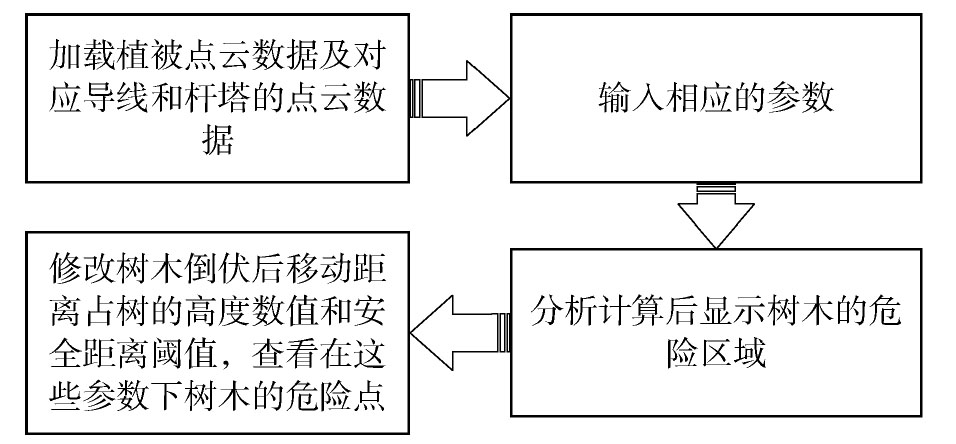
树木倒伏有可能砸断、砸伤架空电线及杆塔,倒伏过程中有可能因为离导线太近而诱导导线放电,因此,研究导线附近树木的倒伏,对维护线路安全稳定具有重要的意义。本文通过机载LiDAR系统获取点云数据,在参考相关线路运行的规程后,使用分析软件,通过设置树木倒伏后移动距离占树的高度及安全距离的阈值,获得树木倒伏危险点的信息,树木倒伏分析报告如图8所示,分析流程如图9所示。

图 8 树木倒伏检测分析报告
Figure 8. Falling tree inspection analysis report

图 9 树木倒伏危险分析作业流程图
Figure 9. Workflow of falling tree hazard analysis
-
本文成功验证机载LiDAR系统在电力巡检中的应用,精确获取电网通道中的危险点信息,包括瞬时工况下的危险点、多工况下的危险点、交叉跨越危险点以及树木倒伏危险点空间信息。其分析结果得到前线班组人员的一致认可,辅助其开展树木修剪,危险点治理等工作,有效地达到电网安全巡检预期目标。
结合工程实践可知,与传统的电力巡检方法相比,采用机载LiDAR系统进行输电线路巡检具有如下优势:(1)数据精度高。高精度的激光点云数据,有利于更加准确便捷地判读地形地物、测量并获取空间信息,从而使数据的分析结果更精确、应用更多元化;(2)数据处理自动化程度高;(3)可获取信息丰富。借助激光点云数据,在数据分析应用过程中可便捷地向运维人员提供诸如建筑高度、植被高度、杆塔高度、地物与导线间距离等信息;(4)作业成本相对传统人工巡检方式较低。
机载LiDAR系统在实际电网运维工作中可以满足多元化的应用需求,可以预见,机载LiDAR系统在电网数字化应用中将更加高效和常态化。下一步需要研究的问题,将围绕激光点云数据处理中关键技术的提升与优化,从而减少数据处理中大量的人工操作,提高机载LiDAR系统在电力巡检中的应用效率,以满足现阶段数字电网高效管理的需求。再者,在点云数据应用方面,下一步可以陆续开展基于高精度激光点云数据的三维建模、以及输电线路资产管理系统建设等工作,进一步推动与深化机载激光LiDAR在电网运维领域中的应用。
基于机载激光LiDAR的电网巡检应用研究
DOI: 10.16516/j.gedi.issn2095-8676.2018.03.022
CSTR: 32391.14.j.gedi.issn2095-8676.2018.03.022
作者简介:


Research and Application of Power Grid Inspection Based on Airborne LiDAR System
-
摘要:
[目的] 对于架空输电线路的巡检运维,利用机载激光LiDAR技术比传统巡检方式完成更高效率、高精度、低成本。 [方法] 以肇庆供电局架空输电线路巡检运维为项目背景,以直升机机载激光LiDAR技术在电网巡检工程中的应用为研究对象,研究并提出本次数据获取和数据处理所用的关键技术,探讨了机载LiDAR系统在电力巡检中的数据应用模式,并结合实践经验进行归纳总结与展望。 [结果] 成功验证了机载LiDAR系统在电力巡检中的应用,精确获取电网通道中的危险点信息,包括瞬时工况下的危险点、多工况下的危险点、交叉跨越危险点以及树木倒伏危险点空间信息。 [结论] 其分析结果可以辅助危险点治理等工作,有效地达到电网安全巡检预期目标。 Abstract:[Introduction] With regard to the inspection and operations of the transmission overhead line, taking advantage of airborne LiDAR can attain higher efficiency, higher accuracy, and lower cost than utilizing traditional inspection mode. [Method] This paper was in the project setting of the Zhaoqing Power Supply Bureau transmission overhead line inspection and operations, moreover, taking the airborne LiDAR technology as the study object. Key techniques of data collection and data processing were analyzed and presented in the research. Data application mode of airborne LiDAR system in power line inspection was discussed. Also, combined with the practical experience, summary and propects were illustrated. [Result] This paper successfully verifies the application of airborne LiDAR system in power grid inspection, and accurately obtains information of defect points in the power grid corridor, including spatial information of defect points of scanning working condition, different working conditions, cross-over, and falling tree. [Conclusion] The analysis results can assist defect point management to effectively achieve expectations of power grid safety inspection. -
图 4 不同工况缺陷分析流程图
Fig. 4 Flow chart of defect analysis under different working conditions
表 1 S-76技术参数
Tab. 1.
Technical parameters of S-76 参数 指标 机身长度/m 13.22 机身宽度/m 2.13 机身高度/m 4.52 主旋翼长度/m 13.41 自重/kg 2 540 最大起飞重量/kg 4 670 最大飞行时间/h 4 最快飞行速度/(km·h-1) 287  下载: 导出CSV
下载: 导出CSV
表 2 HS-1600技术参数
Tab. 2.
Technical parameters of HS-1600 参数 指标 视场角/(°) 最大330,可自行调节 脉冲发射频率/kHz 最大820,可自行调节 测距精度/mm 15 mm(@150 m) 最大测距范围/m 1 350 回波探测 无穷次回波 扫描带宽/m 476.8 俯仰/侧滚角精度/(°) 0.015 旋偏精度/(°) 0.035 高程定位精度/m 0.1
下载: 导出CSV
表 3 输电线路航飞技术参数表
Tab. 3.
Flight technical parameter table for transmission line 参数 指标 相对航高/m 100 飞行速度/(km·h-1) 90 Lidar数据点密度/(点·m-2) 65 航线总长度/km 1 000
下载: 导出CSV
-
[1] 彭向阳,钱金菊,麦晓明,等. 大型无人直升机电力线路全自动巡检技术及应用 [J]. 南方电网技术,2016,10(2): 24-31+76. PENG X Y, QIAN J J, MAI X M,et al.Automatic power line inspection technology of large unmanned helicopter and its application [J]. Southern Power System Technology,2016,10(2): 24-31+76. [2] 陈利明,张巍,于虹,等. 无人机载LiDAR系统在电力线巡检中的应用 [J]. 测绘通报,2017(增刊1): 176-178. CHEN L M, ZHANG W, YU H,et al.Application of UAV-based LiDAR system for power line surveys [J]. Bulletin of Surveying,2017(S1): 176-178. [3] 陈驰,彭向阳,宋爽,等. 大型无人机电力巡检LiDAR点云安全距离诊断方法 [J]. 电网技术,2017,41(8): 2723-2730. CHEN C, PENG X Y, SONG S,et al.Safety distance diagnosis of large scale transmission line corridor inspection based on lidar point cloud collected with UAV [J]. Power System Technology,2017,41(8): 2723-2730. [4] 林祥国,张继贤. 架空输电线路机载激光雷达点云电力线三维重建 [J]. 测绘学报,2016,45(3): 347-353. LIN X G, ZHANG J X. 3D power line reconstruction from airborne lidar point cloud of overhead electric power transmission corridors [J]. Acta Geodaetica et Cartographica Sinica,2016,45(3): 347-353. [5] 尹磊,鲁贵文. 机载激光雷达在电力线路设计中的应用 [J]. 科技创新导报,2013(17): 65-66. YIN L, LU G W. Application of airborne lidar in power line design [J]. Science and Technology Innovation Herald,2013(17): 65-66. [6] 李庭坚,张建刚,徐云鹏,等. 机载LiDAR在数字电网中的适用性分析 [J]. 测绘地理信息,2018,43(1): 86-88. LI T J, ZHANG J G, XU Y P,et al.Analysis of airborne lidar applicability in digital power grid [J]. Journal of Geomatics,2018,43(1): 86-88. [7] 李庭坚,张建刚,张钊. 电力巡检轻小型激光雷达系统的特点及若干注意事项 [J]. 测绘通报,2018(5): 108-111. LI T J, ZHANG J G, ZHANG Z. Characteristics and application guideline of light-weight lidar system [J]. Bulletin of Surveying,2018(5): 108-111. [8] 易琳,秦晓科,王刚,等. 基于改进蚁群算法的电力巡检路径规划[J]. 广东电力,2018,31(3): 115-120. [9] 蓝增荣,胡庆武,隆华平. 基于机载LiDAR的数字电网巡线应用研究 [J]. 大众科技,2013,15(1): 57-59+54. LAN Z R, HU Q W, LONG H P. Research on digital power line inspection based on airborne lidar [J]. Popular Science & Technology,2013,15(1): 57-59+54. -

计量
- 文章访问数: 863
- HTML全文浏览量: 230
- PDF下载量: 43
- 被引次数: 0






