

 下载:
下载:
-
换流站的阀厅内设备是换流站的核心设备,其运行状态对整个直流输电系统的正常运行起到关键影响。特高压换流站中,阀厅设备更是翻倍,系统投运后,运维工作量巨大,但目前设备运维主要通过人工巡检的方式开展。该运维方式劳动强度大,并且存在巡检到位率低、及时性无法保证等缺点。此外,人工巡检对设备的早期发热、外观异常等设备隐患缺乏预检手段,很难及时发现并消缺,存在诸多安全隐患。
红外智能监测系统[1,2,3,4,5]可通过对阀塔等重要设备进行红外热像及可见光视频监控,实现自动测温及高温报警功能,具有非接触、不间断、智能化程度高等优点,目前在变电站、发电厂和个别换流站改造中都有一些试点应用[6]。南方电网2017年反措工作中已明确提出在新建直流工程中的阀厅应配置换流阀红外在线监测系统,因此,红外智能监测系统在换流站中的应用将会越来越广泛。在换流站基建类工程中,滇西北直流输电工程东方换流站是南网首次使用红外智能监测系统。
由于阀厅是一个强电磁干扰源,因而这些监测设备应具备抗强电磁干扰,并能长时间持续在封闭环境下稳定运行,不能因电磁干扰而影响检测结果。因此,系统设备必须满足以下两个基本条件:
1)阀厅内红外测温系统的使用不能影响阀厅内主设备的正常运行。
2)阀厅内红外测温系统要具备防护过电压和抗强电磁干扰能力。
-
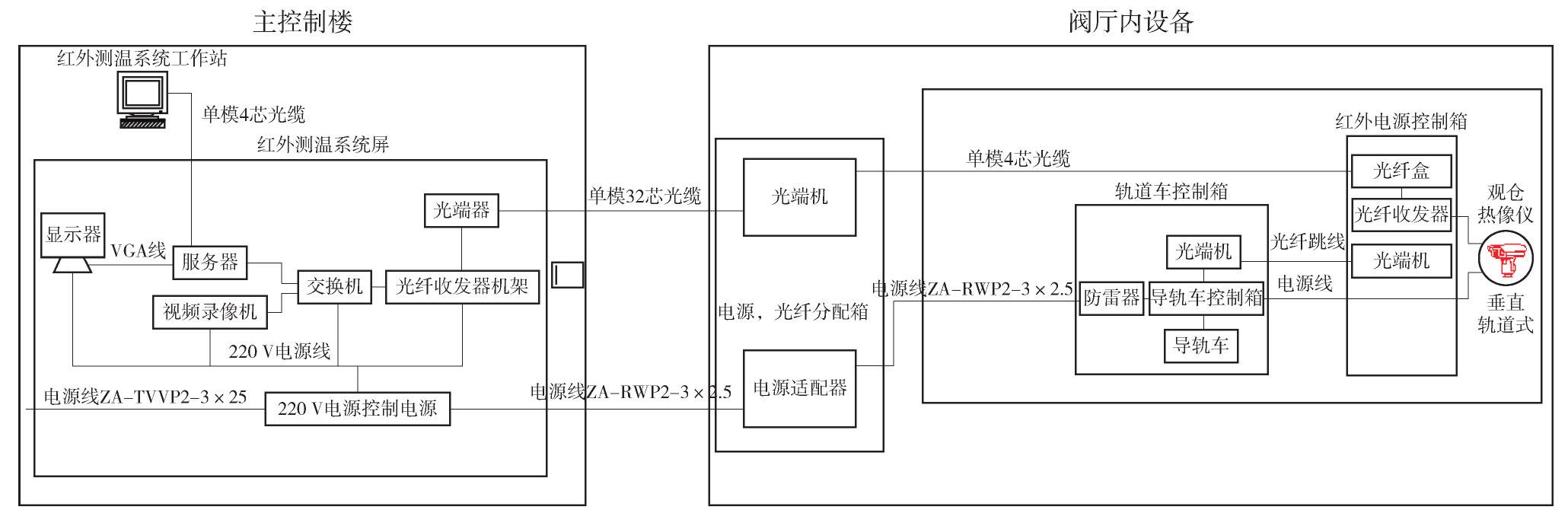
特高压阀厅智能监控系统总体结构如图1所示。

图 1 系统结构图
Figure 1. System structure diagram
红外智能监控系统主要由双光球机、视频光端机、交换机、服务器、工作站以及中间连接线缆组成。
红外测温双光球机部署在阀厅内部,其配置了红外热像仪与高倍变焦可见光摄像机,两者通常安装在同一个云台上,共同监视设备的同一位置。利用可见光摄像可克服红外热像图像对比度低、分辨细节较差的缺点,更准确、及时地判定设备过热点。
为防电磁干扰,数据传输全部采用光纤传输。双光球机采集的数据就地经光电转换后,经光缆传到控制室的光口交换机,服务器、工作站等从该交换机取数据。阀厅内红外测温系统电源电缆采用阻燃屏蔽电缆穿金属管敷设。红外测温外壳、金属管、金属线槽等均要可靠接地。
监测数据通过光纤网络实时传输至监控系统服务器,进行数据分析后,实现阀塔等设备的异常高温实时报警,可“及时发现,提早预知”设备缺陷。
-
1)设备自动识别管理:阀厅内设备可以与换流站的设备台账相对应,从而实现每个设备都有其对应的测温数据,并且运行人员可以设定设备类型,针对不同设备类型采取不同的监视策略。
2)自动预警:提供文字和声音报警功能,在检测到目标设备温度异常时能自动报警,并提供报警位置状况等具体信息。
3)自动巡航:提供多种方式的自动巡检计划和方案,可实现自动开、关机、根据设定每日多次自动巡检、数据分析以及报表输出。
4)报表自动生成:自动记录温度测量值,可对每个设备的温度进行长时间的记录,结合直流输送功率生成温度分析报表或综合报表,展示设备温度变化趋势。
5)红外全景图技术:通过红外热成像仪采集到的红外热像信息,可以生成一幅包含全场景的、清晰度高的红外全景图像。在该图上可以定义设备,生成设备列表。有了这个数据基础,系统可通过红外图像智能识别技术,对自动巡检过程中任意采集的红外热图进行识别,获得该图中所有涉及到的设备的精确位置及工作温度。
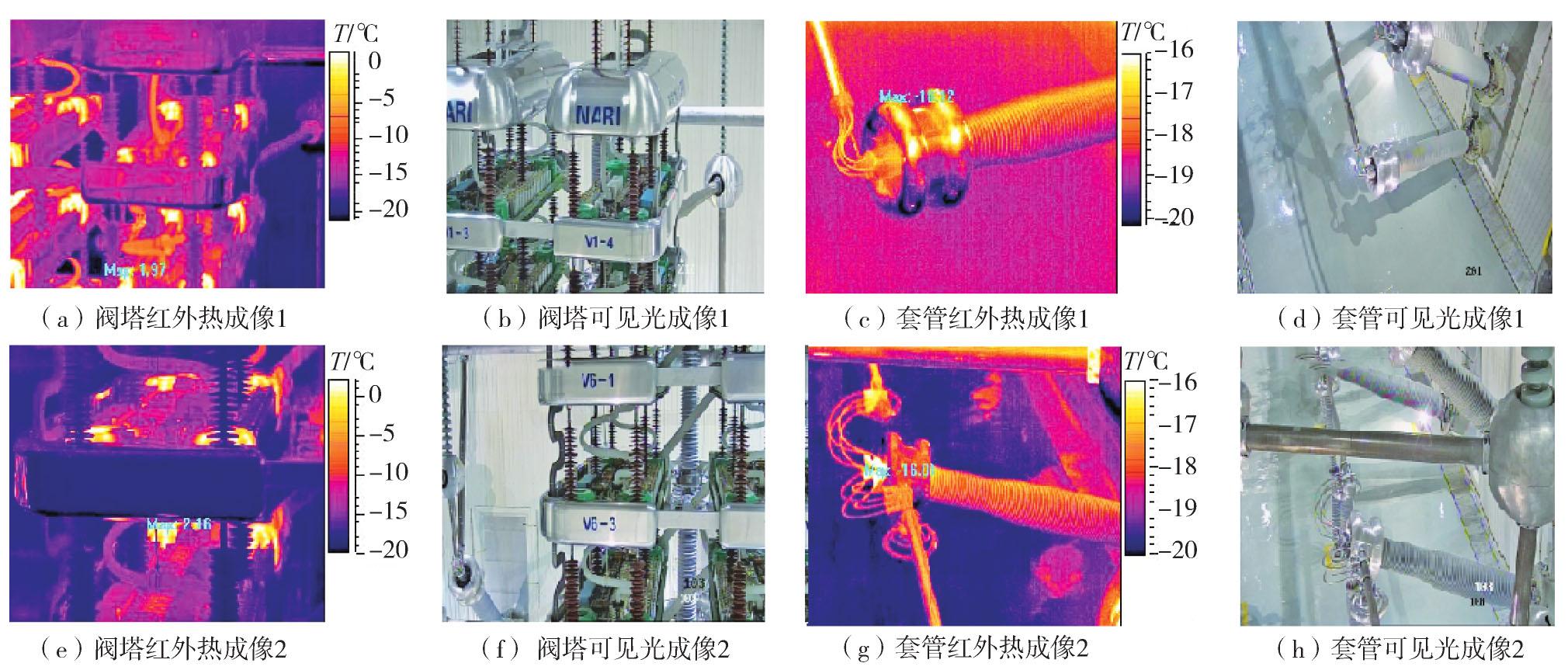
6)界面显示:具有多种灵活的显示方式,既可在一台显示器上同时显示不少于8路的红外热成像图和可见光图(如图2所示),也可在两台显示器上分别显示实时监控画面和温度数据分析。

图 2 红外热成像图和可见光图示例
Figure 2. Example of infrared thermography and visible light diagram
-
红外测温双光球机需要根据被监测设备的特点布置,根据阀厅的大小、是否有遮挡物及空间分辨率等因素校核是否满足要求,主要包括以下几个步骤:
1)型式选择:阀厅的主要设备阀塔是分层结构式,如采用固定式探头容易有监测死角,或者需要数量非常多的探头,如采用水平滑轨需要轨道长,容易出现卡死,为此建议采用垂直轨道式探头。垂直轨道的长度和阀塔的高度保持一致,保证巡航路径可以覆盖每一层阀塔。
2)测点布置:阀厅一般采用单层结构,阀塔采用二重阀或四重阀。二重阀每个阀厅有六个阀塔,四重阀每个阀厅有三个阀塔。建议在每2个阀塔的中间设置垂直轨道探头,兼顾两边阀塔的监测。考虑到阀厅的一边侧墙都布置有换流变的穿墙套管,套管数量多,探头容易被遮挡,而在相对的另一边侧墙不会布置穿墙套管或只有到直流场的穿墙套管,套管数量少,易于躲避,因而建议轨道安装在换流变相对的另一边侧墙,也便于对换流变进线接头位置进行监测。布置好探头后需要进行效核,看是否有遮挡和死区,根据阀厅的实际情况,在有遮挡的地方增加探头。为了使监测更清晰直观,也可以配置更多地探头。
3)校核
a)带电距离校核:带电距离的校核包括两个方面,一个是球机到阀塔等设备的距离,该距离需要考虑导轨加球机的外廓向外突出的尺寸,尤其针对紧凑型阀厅,空间距离狭小,在采购红外测温系统时需限定整体向外突出的尺寸。另一个是当球机靠近直流侧穿墙套管时,需要保证其带电距离满足要求。可以考虑利用高度差和水平偏移设置垂直轨道。
b)遮挡校核:布置完测点后要进行碰撞和遮挡校核,如有遮挡需要调整位置避让,实在不能避让的情况下,需要增加滑动轨道的数量。
c)精度校核:探头布置好后,校核所选择的镜头、布置的位置是否适合阀厅的尺寸,是否能够实现对重要设备的全面监测。
一般而言,检测到4个像素可以达到一般测温,如果需要准确测量温度,需要检测到9个像素。
-
在±800 kV东方换流站,实现了特高压阀厅智能监控系统在南方电网基建工程中首次应用设计。
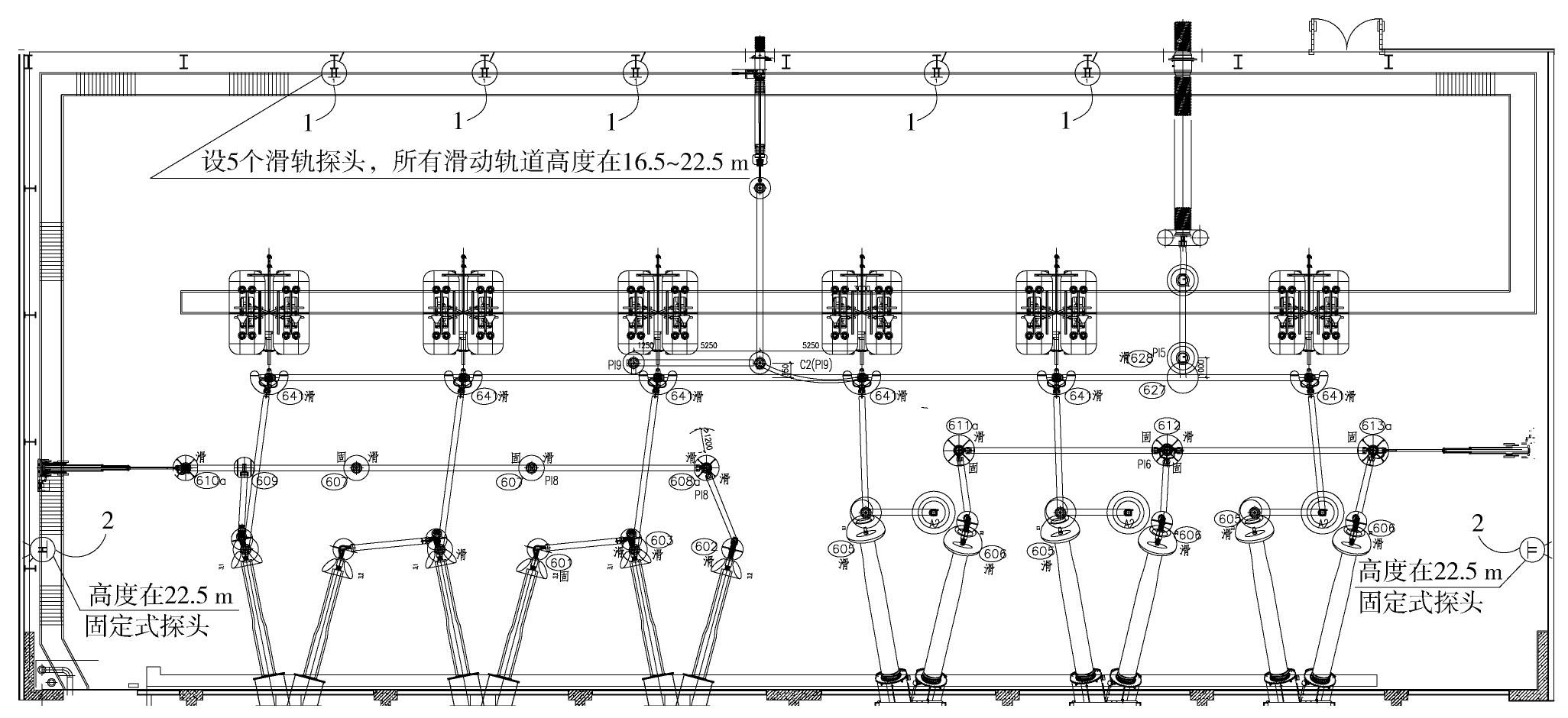
东方换流站低端阀厅的尺寸:长×宽(60.5 m×21.3 m);高端阀厅的尺寸:长×宽(77.8 m×32.6 m)。阀厅采用单层结构,阀塔悬吊于阀厅顶部,按二重阀布置,每个阀厅有6个阀塔,根据这个设备的特点,在阀塔侧墙两组阀塔中间采用垂直滑轨式探头,通过轨道移动探头保证对每层阀塔的监视,在阀塔两端各设一个固定探头弥补垂直滑轨监控的不足。高端阀厅测点布置图如图3所示。固定探头安装于22.5 m高,主要用于监测换流变接头处的发热,可以兼顾阀塔。

图 3 高端阀厅测点布置图
Figure 3. Layout of the high valve hall measurement
靠近套管的滑动轨道需要进行相应的带电距离和是否有遮挡的校核,高端阀厅直流场套管位置较低,约11 m位置,阀塔高度为14~20 m,滑轨布置在16.5~22.5 m,水平距离离开套管4.9 m,利用高度差和水平偏移设置垂直轨道,既可以满足带电距离的要求,又可以实现对阀塔整体监视。低端阀厅套管位置在阀塔中部,无法避开,采用增加一个垂直轨道探头的方案,在套管的左右两侧离开一定距离各设置一个滑动轨道探头。
-
空间分辨率是指遥感影像上能够识别的两个相邻地物的最小距离。对于扫描影像,通常用瞬时视场角(IFOV)的大小来表示(毫弧度mrad),即像元,是扫描影像中能够分辨的最小面积[9]。其计算公式如下:
((1)) 式中:α表示镜头视场角,单位为rad;η表示热像仪的分辨率。
观测目标要保证其在探测器上的投影至少填充满一个像素点,其观测距离L为:
((2)) 式中:d表示待观测目标的直径。
当采用640×480热像仪,18×13.5度镜头时,对于5 cm大小的目标:
((3)) ((4)) 如果实现一般测温,可测温距离通常为观测距离的一半,约为51 m,而要实现精确测温,则可测温距离通常为可观测距离的1/3,约为34 m。
从理论计算可知:如采用640×480热像仪及18×13.5度镜头,从34 m处,即可以对直径为5 cm左右大小的目标物体(如晶闸管)实现精确测量温度,并对超温目标报警、抓拍。
东方站低端阀厅的宽度21.3 m,高端阀厅的宽度32.6 m,从以上计算可以看出不管是高端阀厅还是低端阀厅,在阀厅一边侧墙安装探头,探头的监测范围可以包括整个阀厅宽度。在阀厅两端装设的补充探头,监测范围也基本可以覆盖整个阀厅的长度。能够实现对整个阀厅全方位,无死角监视。
-
阀厅内装设红外智能监测系统,可以对阀厅内重要设备进行实时红外热像及可见光视频监控,实现自动测温功能及高温报警功能。通过监测设备的温度分布情况并进行温度趋势分析,有利于维护部门实时监控阀塔等阀厅内设备的状态,提早发现设备缺陷。为确保对阀厅内设备的全面监控,需根据阀厅内设备的特点和布置方式,合理选择探头型式、参数和布置位置。本文对特高压换流站阀厅开展红外智能监测系统设计,通过对换流站阀厅内设备特点分析,确定红外测温系统探头型式,布置位置,并对初步布置的探头位置进行带电距离校核、遮挡校核和探测精度校核。根据校核结果调整探头位置和数量,可以确保阀厅内设备全方位监测。为今后的类似工程提供有益借鉴。
特高压阀厅红外智能监控系统设计及应用
DOI: 10.16516/j.gedi.issn2095-8676.2019.01.018
CSTR: 32391.14.j.gedi.issn2095-8676.2019.01.018
作者简介:

Design and Application of an Intelligent Monitoring System in HVDC Valve Hall
-
摘要:
[目的] 目前换流站阀厅内设备维护常用人工巡检方式,为了解决该方式存在的劳动强度大、巡检不到位等问题,可在阀厅内装设红外智能监控系统。为了保证系统安装后能够对阀厅内设备全面监视,且不会对现有设备造成影响,文章在换流站现有的红外智能监测系统应用基础上,提出了红外热像仪的一种布置设计原则。 [方法] 通过对换流站阀厅内设备特点分析,确定红外测温系统探头型式,布置位置,并对初步布置的探头位置进行带电距离校核、遮挡校核和探测精度校核,确定最终方案。 [结果] 以东方换流站为例进行了应用设计和校核计算,根据校核结果调整探头位置和数量。所提原则能够实现换流站阀厅的全方位,无死角监视。 [结论] 算例结果对今后的类似工程具有较好的借鉴意义。 Abstract:[Introduction] To overcome some shortcoming such as labor-intensity and inefficient-inspection in manual inspection, which is commonly adopted in the maintenance of the equipment in a HVDC valve hall, a intelligent monitoring system could be established. For omni-direction supervising as well as no effection on the equipment, layout-principles of infrared thermal imagers are proposed in this paper, based on current application of the infrared intelligent monitoring system in convertor stations. [Method] With analysis of the characteristics of the equipment in valve hall, the type and location of the camera probes was determinated. Then, a final scheme was shaped after the check of electrical distance, block and percision. [Result] An example of the infrared intelligent monitoring system is designed and checked in Dongfang convertor station, and some adjustment in the location and number of the camera probes is made. It is illustrated that an omni-directional monitoring system could be built. [Conclusion] This work provide some guidance for similar projects. -
Key words:
- HVDC /
- convertor station /
- valve hall /
- infrared thermometer
-
[1] 胡冬良,丁敬,黄继荣,等. 智能巡检机器人在变电运维工作中的改进及应用 [J]. 浙江电力,2017,36(8): 29-34. HU D L, DING J, HUANG J R,et al. Improvement and application of intelligent inspection robot in substation operation and maintenance [J]. Zhejiang Electric Power,2017,36(8): 29-34. [2] 钱金菊,王柯,王锐,等. 变电站智能机器人巡检任务规划 [J]. 广东电力,2017,30(2): 111+143-149. QIAN J J, WANG K, WANG R,et al. Inspection mission planning for substation intelligent robot [J]. Guangdong Electric Power,2017,30(2): 111+143-149. [3] 周立辉,张永生,孙勇,等. 智能变电站巡检机器人研制及应用 [J]. 电力系统自动化,2011,35(19): 85-88+96. ZHOU L H, ZHANG Y S, SUN Y,et al. Development and application of equipment inspection robot for smart substations [J]. Automation of Electric Power Systems,2011,35(19): 85-88+96. [4] 彭冠炎,穆峰磊,官澜,等. ±1 100 kV换流站户内直流场智能巡检系统设计 [J]. 南方能源建设,2017,4(4): 118-123. PENG G Y, MU F L, GUAN L,et al. Intelligence inspection system design of DC indoor switch yard in ±1 100 kV converter substation [J]. Southern Energy Construction,2017,4(4): 118-123. [5] 任双赞,张默涵,詹世强,等. 带电检测技术在电网设备运行维护中的应用 [J]. 南方能源建设,2015,2(2): 140-145. REN S Z, ZHANG M H, ZHAN S Q,et al. Application of live detection technology on the operation and maintenance of power grid electrical equipments [J]. Southern Energy Construction,2015,2(2): 140-145. [6] 李国尧,刘盛,徐峰,等. 柔性直流换流站阀厅设备温度监测 [J]. 电力建设,2013,34(6): 92-94. LI G Y, LIU S, XU F,et al. Temperature monitoring of valve hall equipment in flexible DC converter station [J]. Electric Power Construction,2013,34(6): 92-94. [7] 张喜平. 变电站远程图像监控系统建设经验 [J]. 电力系统自动化,2005,29(16): 97-99. ZHANG X P. Constructing experience for substation remote image monitoring and control system [J]. Automation of Electric Power Systems,2005,29(16): 97-99. [8] 徐丽华,张龙. 变电站电力设备红外智能巡检、诊断与高效预警系统的应用研究 [J]. 四川电力技术,2016,39(5): 5-8+18. XU L H, ZHANG L. Application research on infrared intelligent inspection,diagnosis and efficient early warning system for electrical equipment in substation [J]. Sichuan Electric Power Technology,2016,39(5): 5-8+18. [9] 彭望琭. 遥感概论 [M]. 北京:高等教育出版社,2002. PENG W L. Telemetry generality [M]. Bejing: Higher Education Press,2002. -

图(3)
计量
- 文章访问数: 891
- HTML全文浏览量: 214
- PDF下载量: 38
- 被引次数: 0




