2022, 9(2): 77-81.
DOI: 10.16516/j.gedi.issn2095-8676.2022.02.010
目的 为了实现托卡马克在放电过程中对等离子体位形的实时重建,在对相机标定算法分析的基础上,提出一种基于全连接神经网络的可见光边缘重建算法。
方法 该算法的作用是建立像素坐标系和托卡马克坐标系的对应关系进而实现等离子体可见光边缘重建。
结果 在该算法的基础上引入小样本学习,来对全连接神经网络重建算法做进一步改进。
结论 实验结果表明该算法可以精确地对等离子体可见光边缘进行重建,同时也满足系统对实时性的要求。
摘要:
目的 为了实现托卡马克在放电过程中对等离子体位形的实时重建,在对相机标定算法分析的基础上,提出一种基于全连接神经网络的可见光边缘重建算法。
方法 该算法的作用是建立像素坐标系和托卡马克坐标系的对应关系进而实现等离子体可见光边缘重建。
结果 在该算法的基础上引入小样本学习,来对全连接神经网络重建算法做进一步改进。
结论 实验结果表明该算法可以精确地对等离子体可见光边缘进行重建,同时也满足系统对实时性的要求。




2022, 9(2): 95-100.
DOI: 10.16516/j.gedi.issn2095-8676.2022.02.013
目的 作为应对全厂断电事故(SBO)所做的重要设计改进项,二次侧非能动余热排出系统(ASP)基于蒸汽发生器(SG) 的二次侧闭式自然循环,在全部补水丧失的情况下,可以有效导出堆芯余热。
方法 基于全范围模拟机Full Scope Simulator(简称FSS),在模拟机平台引入SBO+SBO柴油机失效+ASG气动泵失效事故工况,通过仿真模拟的方式,验证ASP系统对机组一、二回路的影响。
结果 仿真结果表明:ASP系统投运后,堆芯余热被有效导出,运行4 h后,SG内水位可恢复至8.6 m,SG内压力降至1.2 MPa(a),堆芯出口温度降至约为209 ℃,堆芯饱和温度裕度大于20 ℃,堆芯不存在融毁风险,事故处于可控状态。
结论 ASP系统满足设计工况需求,可实现堆芯余热的长期有效导出。
摘要:
目的 作为应对全厂断电事故(SBO)所做的重要设计改进项,二次侧非能动余热排出系统(ASP)基于蒸汽发生器(SG) 的二次侧闭式自然循环,在全部补水丧失的情况下,可以有效导出堆芯余热。
方法 基于全范围模拟机Full Scope Simulator(简称FSS),在模拟机平台引入SBO+SBO柴油机失效+ASG气动泵失效事故工况,通过仿真模拟的方式,验证ASP系统对机组一、二回路的影响。
结果 仿真结果表明:ASP系统投运后,堆芯余热被有效导出,运行4 h后,SG内水位可恢复至8.6 m,SG内压力降至1.2 MPa(a),堆芯出口温度降至约为209 ℃,堆芯饱和温度裕度大于20 ℃,堆芯不存在融毁风险,事故处于可控状态。
结论 ASP系统满足设计工况需求,可实现堆芯余热的长期有效导出。










2022, 9(2): 101-106.
DOI: 10.16516/j.gedi.issn2095-8676.2022.02.014
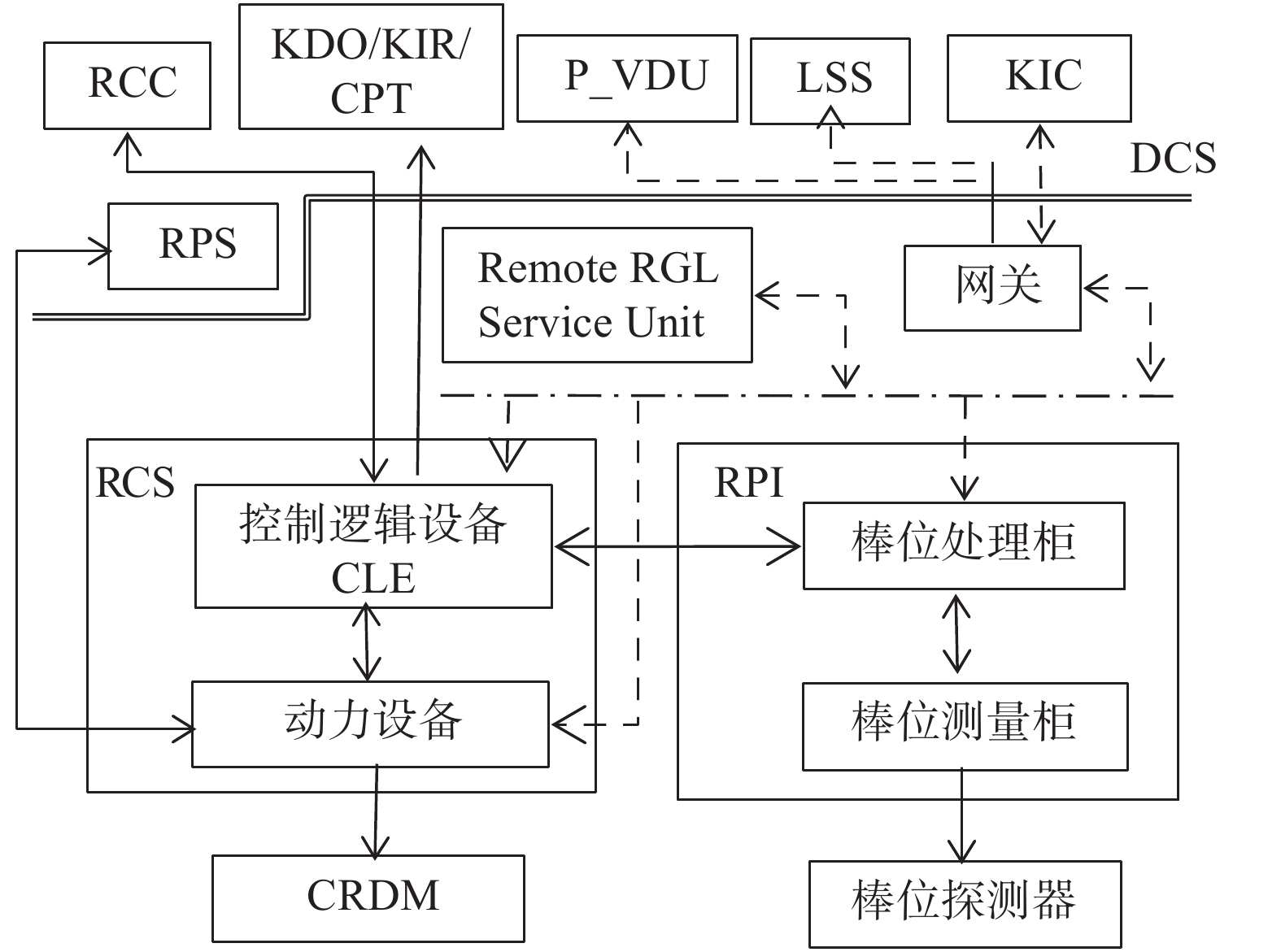
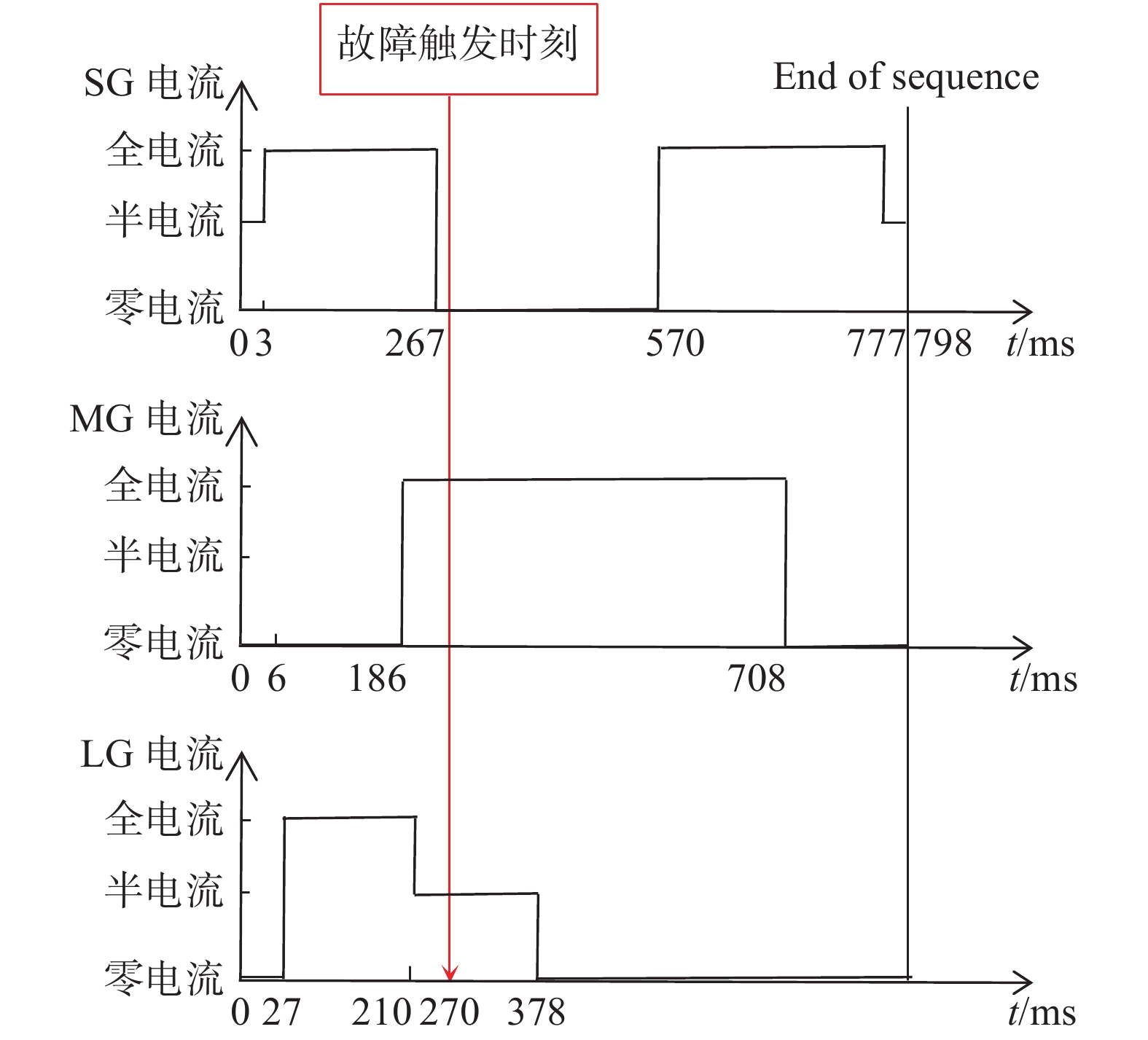
目的 棒位和棒控系统RGL(Rod Position Indication and Rod Control System)是核电机组重要的控制系统之一,其性能好坏直接关系到核电机组的可用性。当该系统出现双夹持故障时会将整个控制棒组闭锁,在机组进行瞬态试验、升降负荷或甩负荷期间控制棒组不能及时动作,可能导致反应堆停堆。
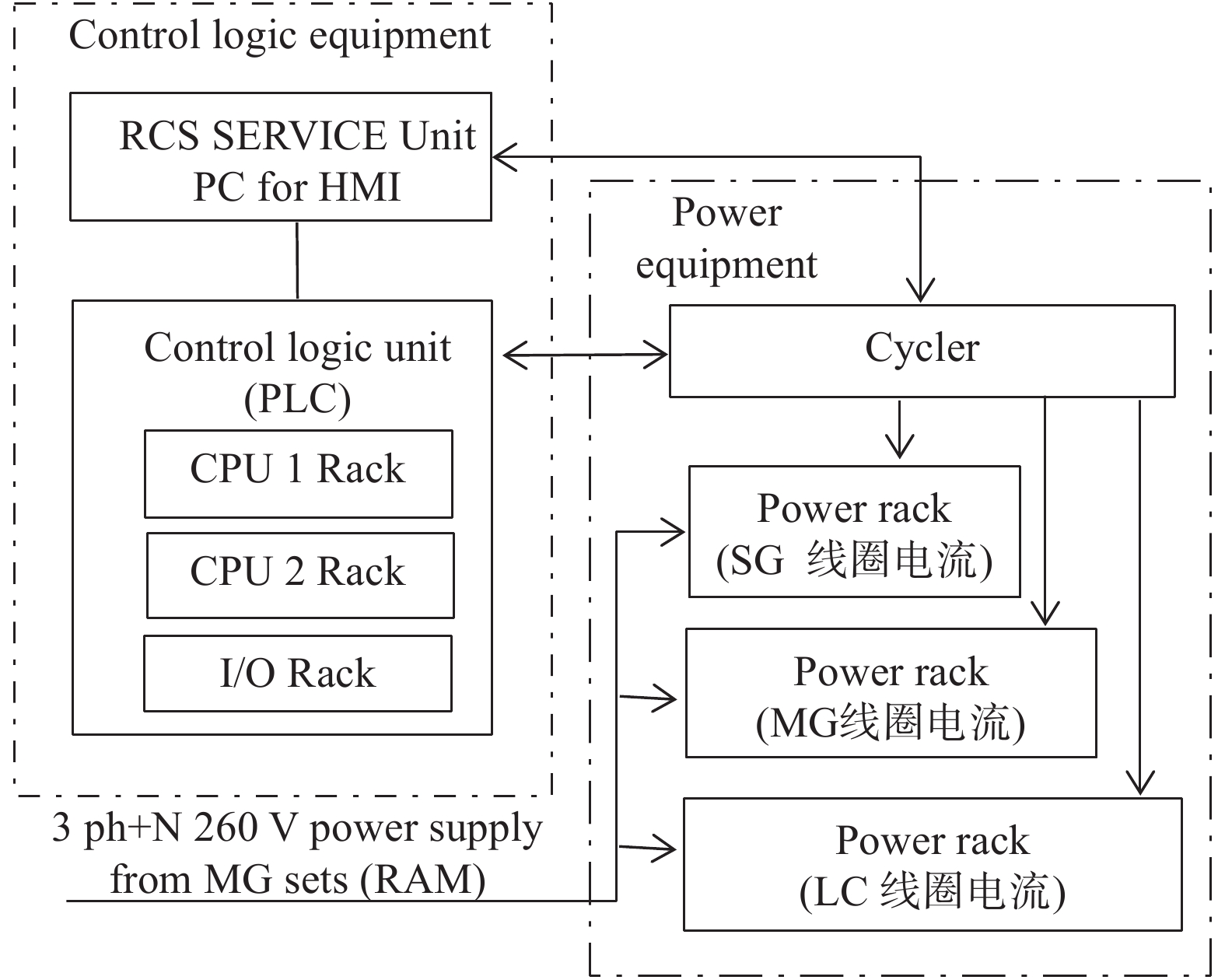
方法 结合某CPR1000核电机组出现的RGL系统双夹持故障经验反馈案例,从设计原理的角度对双夹持故障出现的原因进行了分析研究。
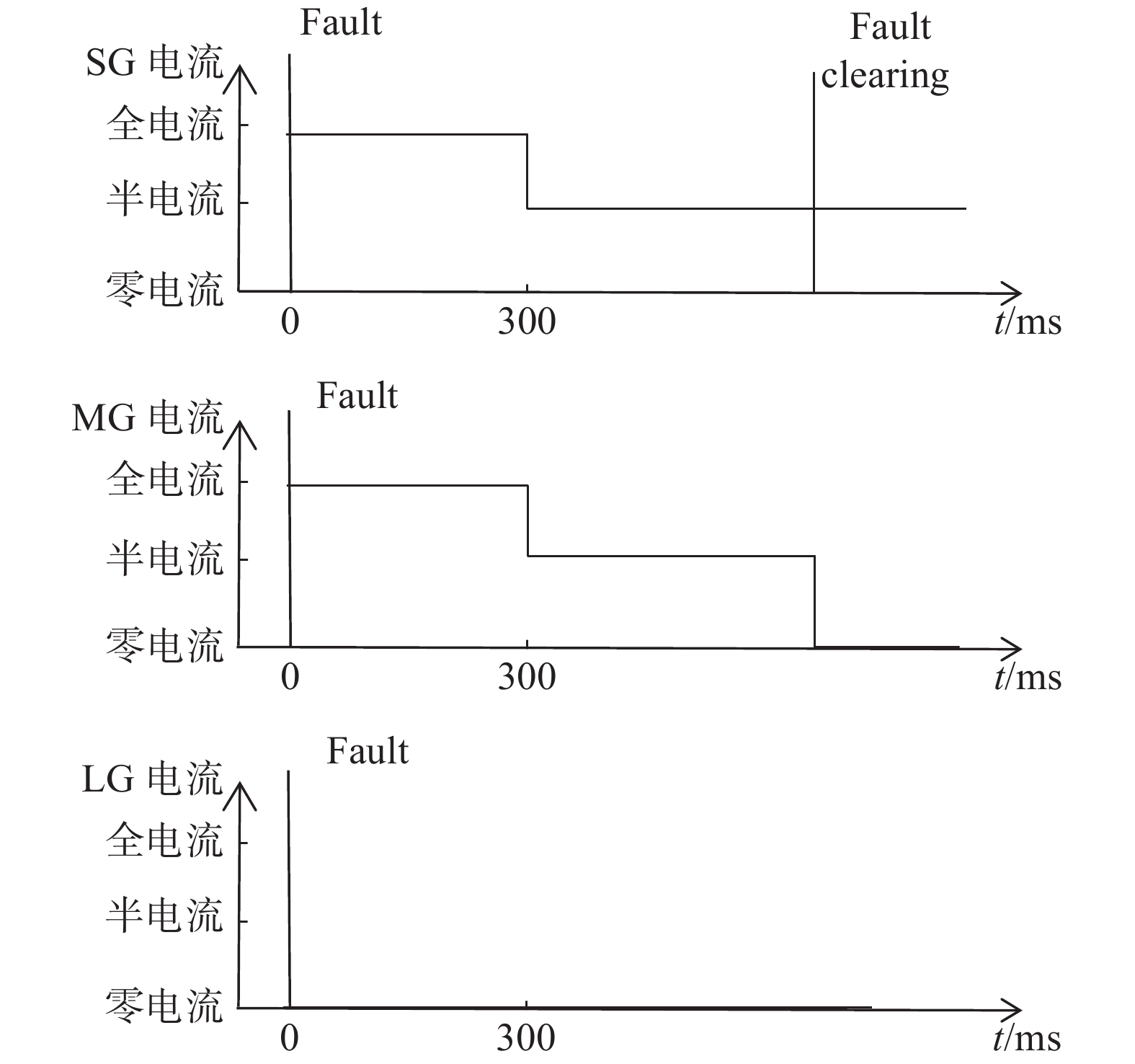
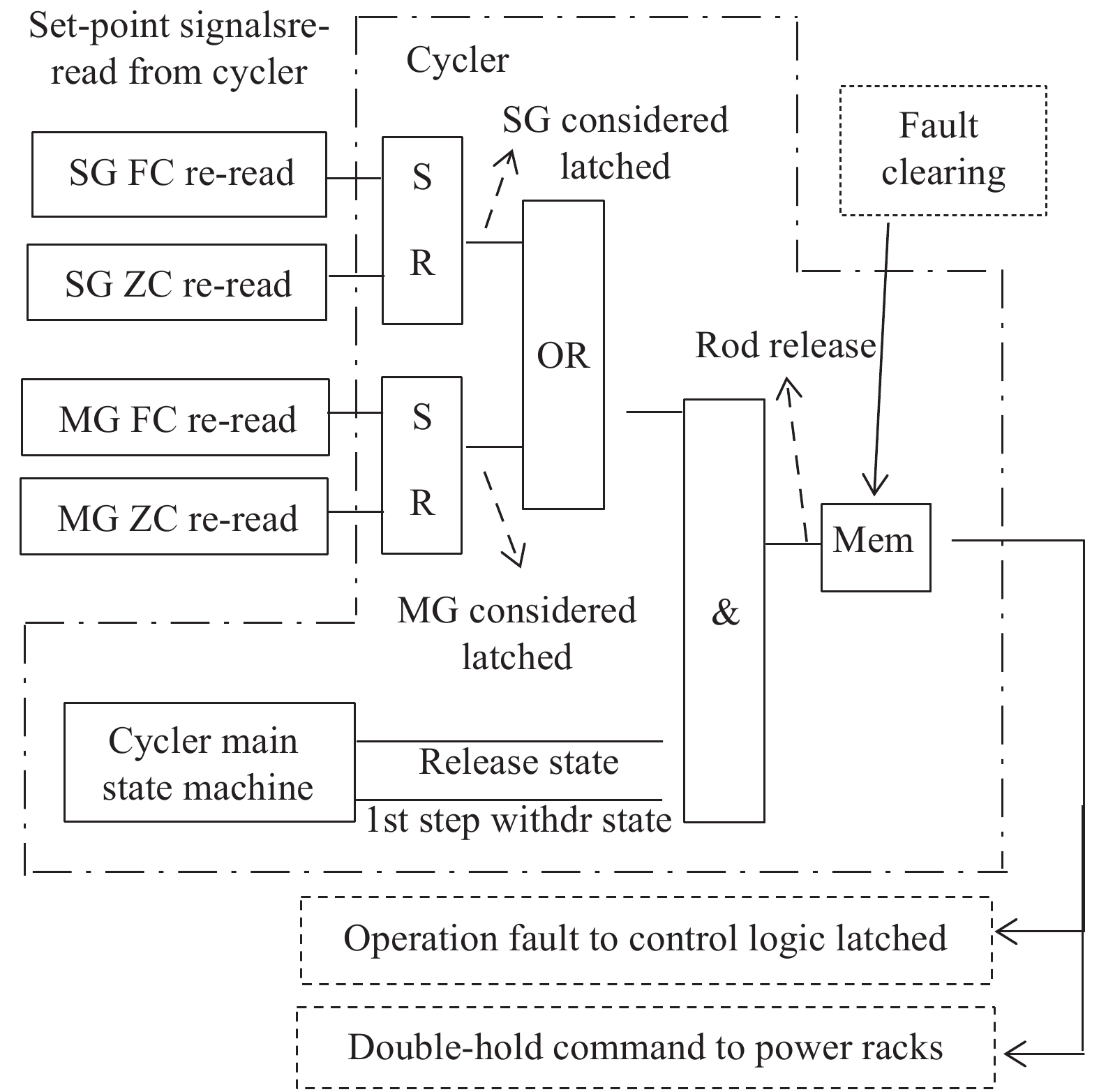
结果 分析结果指出控制器软件中的时刻控制器误判MG机架状态,从而输出错误信号导致了双夹持故障触发。
结论 软件缺陷是造成RGL系统双夹持故障的重要因素。
摘要:
目的 棒位和棒控系统RGL(Rod Position Indication and Rod Control System)是核电机组重要的控制系统之一,其性能好坏直接关系到核电机组的可用性。当该系统出现双夹持故障时会将整个控制棒组闭锁,在机组进行瞬态试验、升降负荷或甩负荷期间控制棒组不能及时动作,可能导致反应堆停堆。
方法 结合某CPR1000核电机组出现的RGL系统双夹持故障经验反馈案例,从设计原理的角度对双夹持故障出现的原因进行了分析研究。
结果 分析结果指出控制器软件中的时刻控制器误判MG机架状态,从而输出错误信号导致了双夹持故障触发。
结论 软件缺陷是造成RGL系统双夹持故障的重要因素。