

-
统一潮流控制器(Unified Power Flow Controller,UPFC)是迄今为止最为灵活、功能最全的FACTS装置,同时具备STATCOM和SSSC的特点,具有独立控制有功功率、无功功率及电压的功能。UPFC可以根据系统需求,选择其不同功能的组合作为控制目标[1]。由于UPFC内部各控制器一般基于各自的控制目标单独制定控制策略,故可能导致UPFC的多个控制通道间产生负的交互影响,这种交互作用会影响到控制器的工作性能,甚至破坏电力系统的稳定性[2,3]。目前,国内外关于UPFC的研究主要为以下两方面:(1)UPFC的数学模型及其在电力系统中的应用;(2)UPFC各控制器间的交互影响分析及协调控制研究[4,5,6]。但UPFC包括串联补偿、并联补偿两部分,各部分又拥有多种不同的控制模式,在电网不同运行工况下,如何对这些控制模式进行精准的选择,灵活有效的运用,仍是有待研究的问题。
以全球定位系统(GPS)技术为基础的同步相量测量单元(Phase Measurement Unit,PMU)是广域测量系统(Wide Area Measurement System,WAMS)中很重要的一部分,其提供的高精度时钟能对电网运行数据实现实时同步采样。应用PMU可在线实时测量母线电压相量和发电机功角等电气量[7],在电网的实时监测、控制方面具有很大的应用前景,同时PMU的出现给电力系统的测量、实时监控、保护以及稳定分析和控制方面提供了一种新思路。
目前,FACTS装置大多基于本地信息进行控制,有一定的局限性,并且各控制器的控制目标是多元的。这样,当电网中存在多个相同或不同的FACTS装置时,可能存在对系统稳定不利的影响。而UPFC中包含多个拥有不同控制模式的控制器,同样这些控制器间会出现对系统稳定性不利的影响。本文即借助WAMS实时测量系统全局信息的功能,对不同运行工况下UPFC各控制器的控制模式选择方案进行探讨。
-
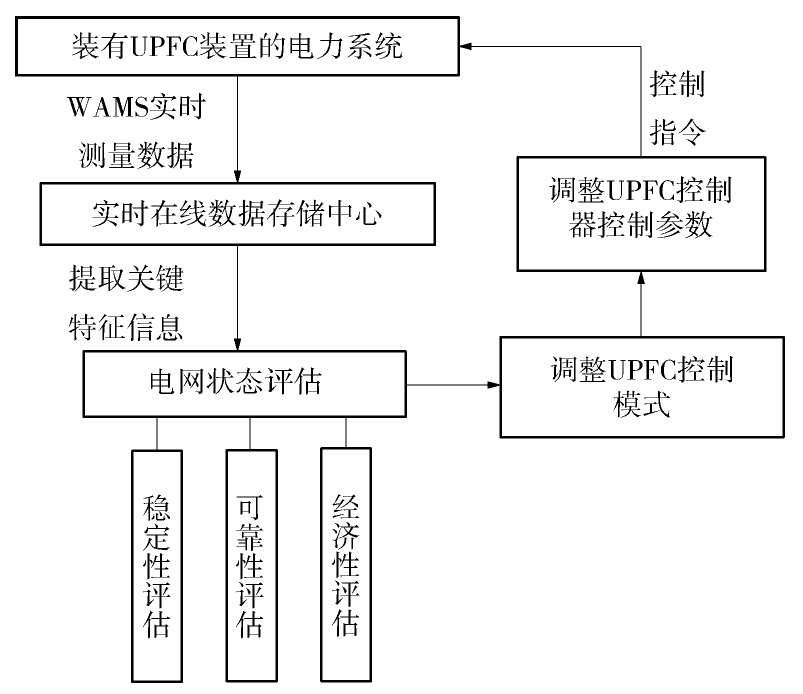
随着广域测量系统的快速发展和逐渐成熟,借助WAMS实时测量全局信息的功能,使得实现多FACTS装置之间的协调配合成为可能[8]。基于WAMS的UPFC装置的协调控制体系如图1所示。

图 1 基于WAMS的协调控制体系
Figure 1. Coordinate control system based on WAMS
将WAMS应用到装有UPFC装置的电力系统中,根据广域测量系统采集数据,对当前电网的运行状态进行分析评估。评估内容主要分为三方面:经济性评估、可靠性评估和稳定性评估。经济性评估主要是考虑电网网损的问题;稳定性评估主要分析电网目前的稳定状况、识别造成不稳定的因素。一般而言,在满足稳定性的情况下考虑可靠性,当稳定性、可靠两者都满足的情况下再考虑将经济性作为控制目标。换言之,保证电网的稳定性是首要的控制目标。
从系统稳定性的角度考虑,主要为保证电压和功角两个因素稳定,根据不同运行工况,又需要从静态、暂态角度分别对电压、功角的稳定性进行考虑,为提高系统电能质量,接下来仅从静态、暂态电压不稳两种运行工况下,对UPFC控制器控制模式进行选取。
-
目前,关于电力系统静态、暂态电压稳定的研究有很多。其中暂态电压稳定主要解决的问题是,系统在受到大扰动以后,快速准确地判断其能否保持暂态电压稳定,如不能保持,则启动为避免电压失稳所应采取的措施,静态电压稳定同理。即电力系统稳定性判别是研究提高系统稳定性方法的前提和基础。
如果全网所有的母线都配置了PMU,则整个电网系统节点电压的幅值和相角就是可观测的,不需进行任何的迭代运算,极大的提高了测量信息的实时性和准确性。本文从众多较成熟的电压稳定性判定方法中选取较为简便、快捷的作为含UPFC电力系统的失稳判据。
-
电力系统静态稳定是指电力系统受到系统中负荷小量变化、风吹摆动引起架空输电线的线间距离变化等小扰动后,不发生自发振荡或非周期性失步,自动恢复到初始运行状态的能力。暂态稳定是指电力系统在某个运行情况下突然受到短路故障、突然断开线路等大干扰后,能否经过暂态过程达到新的稳定运行状态或者恢复到原来的状态。当电压发生持续下降且不可控制,即为电压失稳。
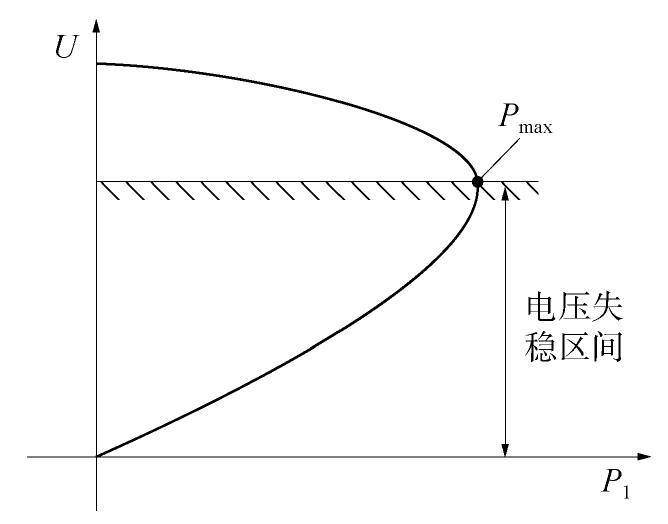
在研究电压失稳问题时,采用和P1-V曲线来描述当系统运行点越过PP1-V曲线上的Pmax点时,系统进入电压失稳状态,如图2所示。电压失稳最终将导致电压崩溃,大量失去负荷。

图 2 P1-V特性曲线
Figure 2. Characteristic curve
-
文献[9]根据线路潮流的电压方程,计算比较输电线路两侧的电压水平,提出的静态电压稳定指标线性度优越,且与PV节点及PQ节点相连时,线路电压指标均可较好地指示电压稳定情况。
静态电压稳定指标如式(1)所示:
((1)) 式中:j为与节点i相连的母线节点;Uj为j端母线电压;Si=Pi+jQi为节点i侧的功率;Z=r+jx为i、j间输电线路阻抗。Isvij的值越接近于1,系统越稳定。
若i为UPFC接入电网所在点电压,借助WAMS可获得式(1)中所需电气量的实时测量信息,实时快速在线分析节点i电压的稳定情况。
-
对暂态稳定控制系统而言,在检测出系统的失稳状态后,必须进一步明确系统的主导失稳模式,才能确保暂态控制措施的有效性。系统失稳状态的检测,则主要依赖于失稳判据。在系统仅出现电压失稳时,UPFC一般安装在由输电通道连接的送受端系统的送端侧。UPFC接入点电压失稳,用电压波动来作为稳定判据[10],表达式如下。
((2)) ((3)) ((4)) 式中:δ=δi-δj;
当电压失稳时,输电断面功率的改变量ΔP主要是由与母线电压幅值相关的分量ΔPv引起。当0.5<S≤1时,系统电压失稳为主导失稳模式。将广域测量系统的实测信息与电压失稳模式识别指标结合,即可在线实时快速判定系统电压失稳模式。
对电网运行状态进行实时判断和评估,是对UPFC进行协调控制的条件和前提。准确判断出电网运行状态,针对电网不同的运行工况,切换UPFC各控制器的控制模式,是对含UPFC的电网进行协调控制的关键。
-
UPFC中串联侧控制器的主要作用为调节系统潮流,并联侧控制器的主要作用为维持节点电压稳定,但UPFC内串、并联侧控制器间存在影响系统稳定的负交互影响,此负交互影响严重时会危及系统稳定性。因此,在静态电压失稳情况下,仅采用并联补偿维持UPFC接入点母线节点电压稳定。
UPFC并联补偿分为恒电压控制和恒无功控制两部分,并联侧变流器通过控制UPFC产生的电压与系统电压的相角差δ,对电压进行调节[11]。
恒电压控制,PI控制器的控制算法
((5)) 恒无功控制,PI控制器的控制算法
((6)) 式中:Δδ1、Δδ2为δ的调节量;S为拉普拉斯算子;KI、KP为PI控制器的比例积分参数;ΔV为UPFC串联侧母线节点电压实际值与参考值的差值;ΔQ为无功实际值与参考值的差值。
从表达式的角度,式(5)、式(6)很难对UPFC并联侧恒电压、恒无功两种控制模式的控制效果进行比较,因此本文后面从时域仿真的角度进一步对其进行分析。
-
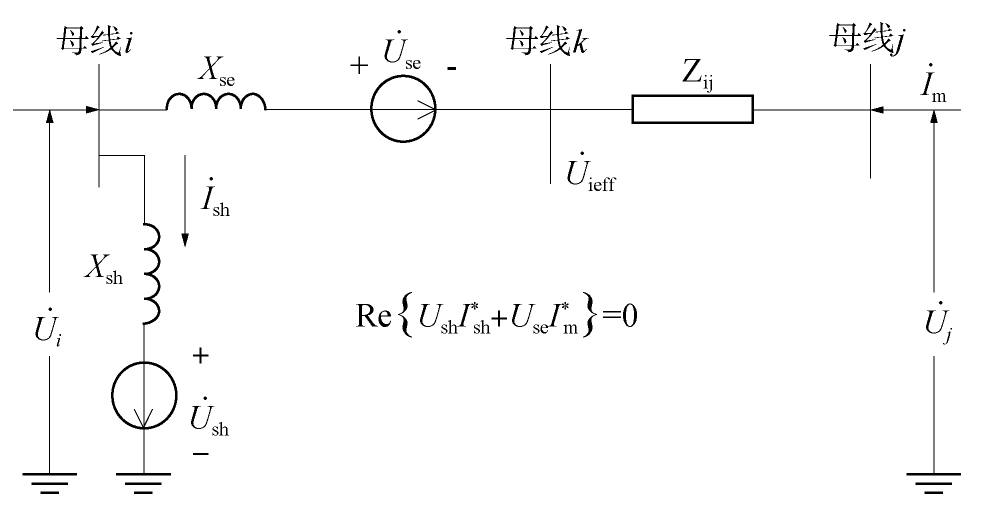
UPFC基于电压源的等效电路如图3所示,串联部分等效为电压源

图 3 UPFC基于电压源的等效电路
Figure 3. Equivalent circuit of UPFC based on voltage source
UPFC串联侧变流器等效为一电压源,并联侧变流器等效为一电流源。为方便计算,将电压源
((7)) ((8)) ((9)) UPFC注入无功功率:
((10)) UPFC安装线路的送、受端无功功率:
((11)) ((12)) UPFC作用下,输电线路无功功率关系:
((13)) 引入UPFC串并联补偿后,UPFC接入点母线电压为:
((14)) 式中:r、γ、Iq三个变量调整
因此,系统暂态电压失稳时,UPFC装置的最佳控制模式为串联侧变流器采用直接电压注入模式。
-
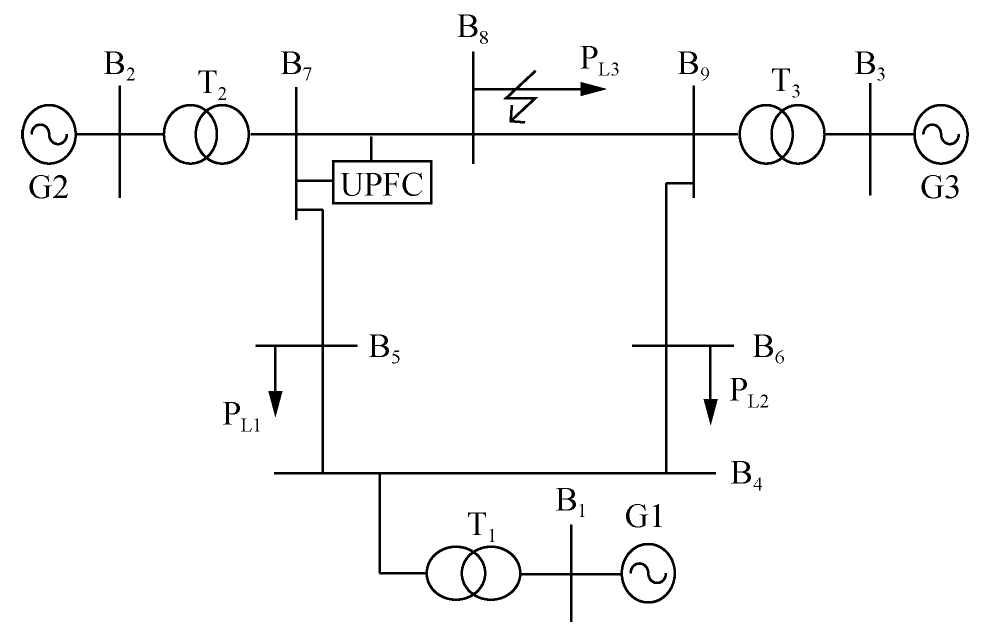
本文以图4所示IEEE的标准3机9节点系统[13]为例,在PSCAD/EMTDC中进行仿真,UPFC装置安装在母线节点7,8之间,发电机G2的功角以及母线B7的电压。

图 4 IEEE3机9节点系统图
Figure 4. IEEE 9 power system diagram
-
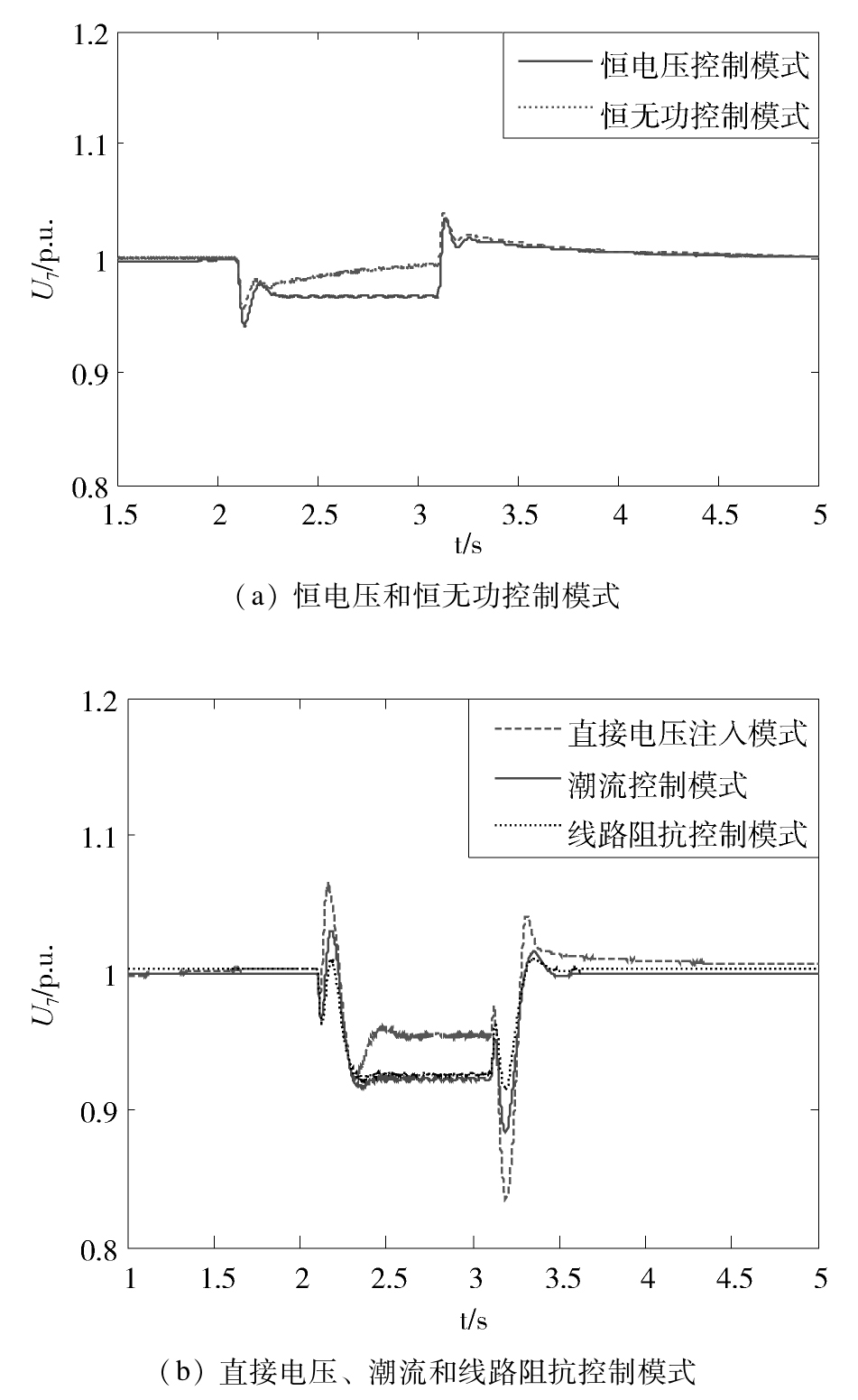
设2 s时,母线8处发生短路故障,3s时故障切除,UPFC串、并联侧不同控制模式对母线电压的影响如图5所示。图5(a)中UPFC并联侧分别采用恒电压、恒无功控制模式时,短路发生前,两种控制模式均可维持母线电压保持稳定,且都可使电压达到1 p.u.。当2 s发生短路时,应用恒电压控制模式时的母线电压骤降到0.94 p.u.,应用恒无功控制模式时的母线电压骤降到0.96 p.u.,随后两者均进行衰减,最终分别稳定在0.99 p.u.和0.97 p.u.。故障切除时,两者分别骤升到1.025 p.u.和1.02 p.u.,随后衰减振荡至稳定,虽然此时采用恒无功控制模式时母线电压骤升幅度略大于采用恒电压控制模式,但前者的最大电压波动值远小于后者。因此可看出,稳态时恒电压与恒无功控制模式维持母线电压的能力基本相同。然而出现故障时,并联侧变流器在恒无功控制模式下体现出了优势,母线节点电压降低幅度、故障发生及切除时电压波动幅度均小于恒电压控制模式。

图 5 UPFC不同控制模式对母线电压的影响
Figure 5. The effect of different control mode on bus voltage
图5(b)中串联侧控制器在直接电压注入模式、潮流控制模式及线路阻抗控制模式,短路发生前,三者可分别维持电压稳定为0.99 p.u.,0.98 p.u.和0.99 p.u.。当2 s发生短路时,三者分别骤升到1.07 p.u.,1.05 p.u.,1.03 p.u.,但三者进行衰减后的稳定值,采用直接电压控制模式可达到0.96 p.u.,而采用潮流控制模式及线路阻抗控制模式只能分别达到0.91 p.u.及0.915 p.u.。因此可看出,稳态时三者维持母线电压的能力基本相同,但均不如并联侧控制效果好。出现故障瞬间,虽然串联侧采用直接电压控制模式骤降幅度较大,但其稳定后维持电压的能力均好于另两种控制模式。
-
电压失稳工况下,UPFC协调控制方案如表1所示。因静态失稳情况下,并联侧控制器可很好的维持系统电压稳定,且考虑UPFC内多个控制器运行时,控制器间会存在负交互降低控制效果的情况,因此,静态失稳情况下,只选择将UPFC并联侧控制器投入运行,且选择恒电压或恒无功控制模式均可。暂态失稳情况下,单独投入串、并联侧控制器均无法达到理想效果,因此选择两者同时投入运行,其中并联侧采用恒无功控制模式,串联侧采用直接电压注入模式。
表 1 不同运行工况下,UPFC协调控制方案
Table 1.
The coordinated control program of UPFC under different operating conditions 运行状态 并联侧控制模式 串联侧控制模式 静态 电压失稳 恒电压/恒无功控制模式 — 暂态 电压失稳 恒无功控制模式 直接电压注入模式 -
在不同运行工况下,UPFC不同运行模式对系统稳定性的效果不同,为弱化UPFC控制模式间的负交互,需针对不同运行工况,选择不同的控制模式。综合考虑UPFC接入电网后系统电压静态稳定性、暂态稳定性的要求,本章提出借助WAMS实现UPFC装置提高系统稳定性的协调控制方案。系统静态电压不稳时,UPFC宜采用并联补偿,且并联侧控制器选择恒电压控制及恒无功控制任一种控制模式均可;系统暂态电压失稳时,UPFC装置的最佳控制模式为串联侧变流器采用直接电压注入模式,并联侧变流器采用恒无功控制模式。本文仅针对系统电压不稳情况下,UPFC各控制器的控制模式进行了探讨,系统功角不稳工况下,UPFC的系统控制方案仍有待继续研究。同时,为提高对工程的指导作用,WAMS中PMU单元采集信息的时滞性对系统失稳判别、UPFC控制模式切换的影响,及UPFC如无法根据运行工况进行切换时的后备措施仍需进一步进行深入研究。
基于广域测量系统的UPFC协调控制方案探讨
DOI: 10.16516/j.gedi.issn2095-8676.2017.03.011
CSTR: 32391.14.j.gedi.issn2095-8676.2017.03.011
Coordinated Control Program of UPFC Based on WAMS
-
摘要:
考虑UPFC串、并联侧包含多种控制模式,为使其在含UPFC的电力系统中达到理想控制效果,本文提出UPFC串、并联侧根据不同运行工况选择控制模式的协调方案。论文以电压稳定为控制目标,借助WAMS实时测量全局信息的功能,在静态失稳、暂态失稳工况下,选择静态失稳、暂态失稳的判别方法作为UPFC控制模式的切换条件,并对UPFC的控制模式进行分析并制定协调控制方案。利用PSCAD/EMTDC时域仿真,验证了协调控制方案的有效性,可实现不同运行工况下UPFC各控制器间的相互协调。 Abstract:In the electric power system with UPFC, depending on the operating conditions to select appropriate control model is the key to online real-time monitoring system.The control objective of the paper is voltage stability. In the conditions of static instability and transient instability, the effect of multiple control mode with UPFC is studied. Select the determining method of voltage instability as the the switching condition of control mode. Then, coordinated control program of UPFC is selected and developed.The program can achieve flexible switching of UPFC control model, make sure the coordination between controllers, reduce the negative interaction, and better meet the requirements of security, stability and flexible running. -
Key words:
- UPFC /
- voltage stability /
- WAMS /
- coordinated control
-
表 1 不同运行工况下,UPFC协调控制方案
Tab. 1.
The coordinated control program of UPFC under different operating conditions 运行状态 并联侧控制模式 串联侧控制模式 静态 电压失稳 恒电压/恒无功控制模式 — 暂态 电压失稳 恒无功控制模式 直接电压注入模式  下载: 导出CSV
下载: 导出CSV
-
[1] 程汉湘,聂一雄. 柔性交流输电系统 [M]. 北京:机械工业出版社,2013:187-256. [2] 曹一家,陶佳,王光增,等. FACTS控制器间交互影响及协调控制研究进展 [J]. 电力系统及其自动化学报,2008,20(1):1-8. CAO Y J, TAO J, WANG G Z,et al. Research progress on interaction and coordinated control among FACTS controllers [J]. Proceedings of the CSU-EPSA,2008,20(1):1-8. [3] ZOU Z Y, JIANG Q Y, CAO Y J,et al. Normal form analysis of the interactions among multiple SVC controllers in power systems [J]. IEEE Proceedings-Generation,Transmission and Distribution,2005,152(4):469-474. [4] WANG H F, JAZAERI M, JOHNS A T. Investigation into the dynamic interactions of multiple multi-functional unified power flow controllers [J]. IEEE Power Engineering Letters,2000,20(7):45-48. [5] 邹振宇. 多灵活交流输电控制器间交互影响分析及其协调控制 [D].杭州:浙江大学,2006. [6] 杜文娟,秦川,王海风,等. UPFC控制的协调设计—变参数开环解耦控制方法 [J]. 电力系统自动化,2008,32(8):19-23. DU W J, QIN C, WANG H F,et al. Coordinated design of UPFC—a variable-parameter open-loop decoupling method [J]. Automation of Electric Power Systems,2008,32(8):19-23. [7] 鞠平,代飞,金宇清,等. 电力系统广域测量技术 [M]. 北京:机械工业出版社,2008. [8] 陈维,黎灿兵,曹一家,等. 基于WAMS的多FACTS装置协调控制系统的框架设计 [C]//中国电机工程学会.中国电机工程学会第十二届青年学术会议论文集.杭州:中国电机工程学会,2012. [9] 巩伟峥,房鑫炎. 基于广域测量系统的电压稳定指标 [J]. 电网技术,2011,35(4):71-75. GONG W Z, FANG X Y.A on-line voltage stability index based on wide area measurement system [J]. Power System Technology,2011,35(4):71-75. [10] 吴为,汤涌,孙华东,等. 电力系统暂态功角失稳与暂态电压失稳的主导性识别 [J]. 中国电机工程学报,2014,34(31):5610-5617. WU W, TANG Y, SUN H D,et al. The recognition of principal mode between rotor angel instability and transient voltage instability[J]. Proceedings of the CSEE,2014,34(31):5610-5617. [11] 项英桐,刘天琪,李兴源. STATCOM基本控制与附加控制的比较研究 [J]. 华东电力,2011,39(9):1462-1466. XIANG Y T, LIU T Q, LI X Y. Comparative study between basic control and supplementary control of STATCOM [J]. East China Electric Power,2011,39(9):1462-1466. [12] KUMKRATUG P, HAQUE M H. Versatile model a simple power of a unified power flow controller in system [J]. IEE Proc-Gener Transm. Distrib. 2003,150(2):155-161. [13] 万波,张焰. 一种新的UPFC潮流计算模型 [J]. 电力自动化设备,2003,23(12):25-27. WAN B, ZHANG Y. A new UPFC model for power flow analysis [J]. Electric Power Automation Equipment,2003,23(12):25-27. -

图(5) / 表 (1)
计量
- 文章访问数: 354
- HTML全文浏览量: 152
- PDF下载量: 28
- 被引次数: 0














