

-
水深超过500 m,深海油气开发普遍采用浮式生产系统,包括浮式平台、定位系统和海洋立管三个组成部分,而浮式平台主要有四种类型:浮式生产储油系统(FPSO),半潜式平台(SEMI),张力腿平台(TLP)和立柱式平台(SPAR)。在风浪流的联合作用下,浮式平台会发生大幅低频慢漂和波频响应的联合运动,为了保持平台的正常作业,需要采用系泊系统对深水浮式平台进行位移控制。在浮式平台的设计过程中,一般先要在频域内对平台进行波浪响应分析,系泊系统的作用一般是忽略不计或只是考虑系泊系统的静恢复力。然后将水动力荷载传递到有限元模型上对结构进行有限元分析。利用水动力分析结果和有限元分析结果,结合规范联合对平台进行设计。同时,由于浮式平台整体系统的非线性及动力学特性,势必要对浮式平台系统进行有效的时域耦合分析,整体耦合响应结果除了用于平台和系泊/立管系统的初步设计外,还可作为系泊缆索或立管的动态边界条件,对其进行详细设计。对于浅水锚缆,常采用悬链线理论模拟其对平台的静力载荷效应,该方法可较好地预报浅水系泊的运动特性。但在深水环境中,系泊系统除了提供控制平台运动的静态恢复力,由于系泊缆索长度随水深增大急剧增加,系泊缆索受到的海流拖曳力、水动力阻尼和惯性力的作用大大增加,通过系泊缆索导缆孔施加到平台上,对平台的偏移和低频运动具有重要影响。同时,浮式平台带动系泊缆索/立管等柔性杆件一起运动,从而诱发大幅动态应力。随着水深的增加,浮式平台与系泊系统之间的动力相互作用越来越大。在这种情况下,为了精确预报平台运动和系泊系统动力响应,必须同时求解浮体运动方程和系泊缆索/立管动力方程,即采用动态耦合的方法来考虑两者之间的相互作用[1]。
本文将对浮式平台系统设计分析的流程,计算分析中的具体问题和研究方法进行简要讨论及阐述,然后结合深水浮式平台系统分析程序和深水结构评估程序,对海洋平台以及系泊缆索和立管的设计分析步骤进行介绍。
-
深水浮式系统作为常年作业于海上油田的海洋工程结构物,在其寿命期内所遭受的载荷除了自重和静水载荷外,还有风载荷、流载荷和波浪载荷,以及地震和海啸等偶然性载荷。在平台结构的设计过程中,首先基于三维势流理论的设计波方法[2-4],对浮式平台进行波浪响应计算,然后将设计波参数下的波浪载荷传递到有限元模型上,采用有限元方法计算结构强度,在获得了平台主体结构的应力水平后,按照规范规定的应力标准进行结构强度校核。
在深水的情况下,由于系泊系统强非线性的影响,一般需要对浮式平台和系泊/立管系统进行整体耦合分析。在定常力作用下,首先计算浮式平台系统的静平衡位置,同时得到系泊系统在静平衡位置处的恢复力刚度,然后以此作为耦合动态分析的起点。基于解耦或全耦合分析方法,得到浮式平台系统的整体运动响应以后,可以对浮式平台、系泊缆索和立管进行初步设计。同时,将浮式平台的运动传递给系泊缆索和立管,并对其进行动态分析,可以结合规范对系泊缆索和立管进行详细设计。
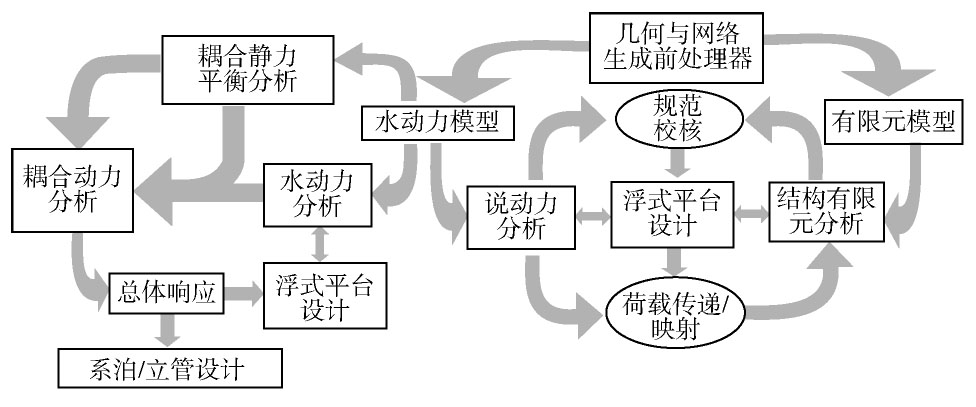
图1为浮式平台系统设计分析的流程图,流程图中包含了两个设计循环过程,一个循环是首先对浮式平台进行水动力分析,然后将水动力荷载传递到结构模型上进行有限元分析,最后根据规范对平台进行强度校核和设计,水动力分析和有限元分析的结果也可作为平台结构设计的依据。另一个循环是首先对浮式平台及其系泊/立管系统进行耦合静平衡分析,然后在静平衡位置对整个系统进行耦合动态分析,得到浮式平台系统的整体响应,最后根据响应结果对平台和系泊缆索/立管进行设计。

图 1 深水浮式平台系统设计分析流程图
Figure 1. The Flow Chart for Design Analysis of Deepwater Floating Platform System
-
在深水浮式平台系统的设计分析中,涉及到浮式平台的水动力分析、设计波分析、结构强度评估分析和平台系统耦合分析。在波浪作用下,浮式系统的动力响应模拟涉及到平台的慢漂运动、平台升沉方向的高频响应和系泊/立管系统的三维动力学分析等具体问题。另外,设计波参数的正确选择和结构强度的正确评估也是结构设计中的重要环节。要解决这些具体问题,必须正确理解和判断浮式平台系统的非线性特性,采用准确可行的研究方法,并建立可靠的数学力学模型。
在实际海洋工程深水浮式系统设计分析过程中,需要特别注意和重点解决如下几个关键问题:
1)水动力分析中的非线性波浪力问题。
2)阻尼力的来源及模拟方法。
3)柔性系统的动力学特性及力学模型。
4)浮式平台系统的时域耦合分析方法。
5)设计波参数的计算。
6)平台主体结构强度评估方法。
针对以上几个关键问题,下面将分别进行论述,并对具体问题的解决方法进行简单介绍。
-
非线性波浪力的模拟计算是水动力分析中的重要内容。浮式平台在波浪中的运动存在各种各样的非线性效应,这些非线性对平台的设计分析有重要影响,一般不可忽略。
1)非线性波浪力主要来自不同频率组成波之间的相互作用,在水动力分析中需要重点考虑二阶波浪力的影响,包括和频力、差频力。差频波浪力的作用周期一般与平台平移运动的固有周期接近,从而引起平台的大幅慢漂运动;而和频波浪力是引起平台“Ringing”和“Springing”效应的主要来源。因为一阶波浪力的周期一般在几十秒以内,所以只有考虑了二阶非线性波浪力的影响,才有可能使平台在波浪频率以外形成低频或高频共振。平台的大幅慢漂运动是设计系泊系统的主要参数,而高频共振则是计算张力腿疲劳的重要组成部分。
2)作用在物体表面的压力分布可以通过非恒定伯努利(Bernoulli)方程来描述,其中包含了非线性的速度势平方项。同时,波浪力是通过对浮式平台瞬时湿表面上的压力积分得到的,而瞬时湿表面随着时间而变化,这样也形成了非线性波浪力。
3)二阶非线性波浪力除了二阶势和二阶运动引起的波浪力,还包括一阶速度势和一阶运动的相互耦合项。在浮式平台的水动力分析中,必须至少考虑波浪本身的二阶非线性波浪力。
考虑以上的非线性特点,必须采用非线性水动力模型[5-10]来求解。根据所采用的数值模拟方法不同,可以分为有限元法、有限体积法、边界元方法和无网格粒子法。按照对问题时间项处理的不同,又可以分为频域方法和时域方法。一般采用三维势流理论来求解,虽然所研究问题的控制方程是线性的,但是瞬时物体表面边界条件和自由水面边界条件都具有非线性,这也是水动力问题求解的难点所在,此外,远方辐射边界条件的恰当处理也非常重要。
完全非线性问题也即严格满足瞬时物体表面条件和自由水面条件的问题,这一问题的数值求解非常困难,并且计算量很大,于是通常引入摄动展开理论和泰勒级数展开方法。在微幅波的假定下,采用泰勒级数展开将原来非线性和位置不确定的自由水面边界条件变换为关于静水面的一阶、二阶和更高阶自由水面边界条件;在浮体小振幅运动的假定下,将原来非线性的瞬时物体表面边界条件变换为关于平均物面的各阶次物面边界条件。如果上述各边界条件只考虑到一阶,就构成了线性理论;如果考虑到二阶,就构成了二阶理论;如果自由水面边界条件考虑到一阶,而物面边界条件在瞬时位置满足,这样就形成了物面非线性理论。
-
阻尼力的来源各种各样,对浮式平台的运动也是至关重要的,需要采用恰当的模拟方法来综合考虑。
1)辐射阻尼来自于物体运动产生的波浪辐射,在低频范围,辐射阻尼一般相对较小,可以忽略。
2)波浪漂移阻尼是由于作用在物体上的波浪漂移力而引起的,与系泊结构物的慢漂移速度成正比。
3)黏性阻尼力是在波浪中运动物体的最主要阻尼力之一。它通常被假定为与速度的平方成正比,并用Morison公式中的拖曳力来近似计算。
4)系泊阻尼[11-13]主要来自作用在系泊缆索上的拖曳力以及系泊缆索与海底之间的摩擦。在深海环境中,系泊阻尼是影响浮式平台系统运动的重要因素。
阻尼力的理论计算相当困难,目前最可靠的方法是模型试验,可以通过模型试验来考察实际的阻尼大小,并在数值计算中进行模拟,工程上一般采用经验公式来计算。上述的1)和2)类阻尼力通常可以采用基于势流理论的边界元方法在频域内进行求解,而3)和4)类阻尼力一般基于Morison方程进行计算,关键在于确定其中的阻尼力系数大小。
-
柔性系统包括系泊系统和立管系统。随着水深的增加,系泊阻尼对浮式平台运动的影响会越来越大。如果忽略了这点,结果会形成过于保守和不经济的平台设计方案。同样,随着水深增加,系泊缆索的质量增加,缆索的质量动力特性(惯性力效应)变得越来越明显,缆索的惯性力对平台的运动以及缆索自身的受力都有重要影响,此时一般不可忽略。因此,在深水环境中,柔性系统的惯性力、拖曳力等动力学效应一般不可忽略,需要建立三维动力学模型对其进行求解。
立管一般可分为顶部预张力立管(TTR)和刚悬链线立管(SCR),它们会随着上部浮式平台进行大幅度的平移及转角运动,几何非线性特点比较明显。这些柔性构件的拉伸、弯曲和扭转相互影响,并与变形量成非线性关系。同时,从三维力学理论的角度来看此问题,三维大变形分析中的大转角过程不能作为矢量来处理,因此与二维分析方法相比在计算上存在一定难度。
随着学者们的研究和开发,逐渐建立了不同的力学计算模型,这些模型有静力方法,也有动力方法,需要根据实际的工程问题来选择合适的求解模型。下面分别介绍一下海洋工程中的一些由简单到完善的柔性构件计算方法[14-17]。
1)线性弹簧法。此方法将系泊缆索或立管作为一个线性弹簧来处理,通过计算得到系泊缆索或立管的线性恢复刚度,并将此刚度应用在频域分析中。然而,在大变形情况下,系泊系统和立管系统都不是线性系统,把它们当作线性弹簧来处理显然是不合理的,而且此方法不能分析柔性构件的细节。
2)悬链线理论。此方法是一种相对简单的经典方法,实施起来也非常方便,很多学者进行过研究。悬链线方法是一种静力法,是在特定条件下对实际问题简化后的近似解。此方法不仅可以计算单一材质缆索,还可以对多段组合缆索进行求解,并可以考虑缆索的弹性变形,但是忽略了系泊缆索/立管的动态力及流体拖曳力的影响。
3)准静力方法。此方法也是一种静力分析方法,但在力学分析上多采用有限元法作为基础。根据有限元法的不同形式,在力学数学方法上会有很大的不同。准静力方法是目前系泊分析中一种很有用的方法,主要用于在初步设计阶段进行前期分析及系泊参数的选择。这种方法在浅水中一般会得到较保守的结果,在深水中由于动态力影响较大,也会造成一定误差。
4)集中质量法。此方法把系泊缆索离散为一系列的集中质量点,这些集中质量点一般称为节点,并采用无质量的弹簧将这些节点进行连接,一般将这种模型称为集中质量—弹簧模型。此模型将作用在系泊缆索上的所有外力凝集于节点上,可以非常方便的处理系泊缆索中含有浮标或重块的情况,在静动力分析上具有一定优势。集中质量法在数值方法上一般采用有限差分法将所有质量点的连续方程和受力平衡方程进行离散,转化为线性代数方程组进行求解。此方法能够考虑惯性力和拖曳力等的影响,可用来求解系泊缆索的动力问题。
5)细长杆有限元模型。此力学模型基于细长杆理论(Rod Theory),采用有限元方法求解系泊缆索/立管的三维大变形问题,是目前海洋工程中运用较多的一种方法。它在一个总体坐标系中描述系泊缆索/立管的动力问题,不需要坐标系的变换,在变形构形中用起始于原点的矢量来描述每个单元的位置,利用高阶形状函数来表达杆件的变形,同时忽略了扭转对变形的影响,这样在一定程度上绕过了大转角变形时的非矢量问题。当更加重视浮式平台的运动响应而非柔性杆件自身的力学性能时,可以只用少量单元就能快速进行浮式平台系统的耦合动态分析。
6)三维杆件力学模型。此模型在理论上更加严谨,一般采用拉格朗日法或Corotational法进行有限元大变形求解,是求解柔性杆件非线性问题的最好方法。该方法要求对变形状态下的系统进行迭代求解,同时需要局部坐标系和整体坐标系之间的坐标变换,计算比较耗时,但在准确性上是被工业界公认的。
-
浮式平台系统的耦合分析[18-21]主要有频域方法和时域方法,频率分析的结果可以在一定程度上非常直观地表现浮式平台在波浪作用下的运动响应,但是频域方法对实际问题进行了一定简化,无法很好地处理一些特殊情况和非线性问题,而时域耦合分析方法在处理这类问题中更加有效。时域分析方法由于考虑了时间项的影响,可以对结构物的响应进行实时求解,在应用上具有更大的自由度,可以很好地处理各种非线性问题。
在时域求解中,又可以分为间接时域耦合分析方法和直接时域耦合分析方法。间接时域耦合方法首先在频域内计算水动力系数,然后基于平方传递函数,采用快速傅里叶变换(FFT)在时域内计算作用在结构上的波浪力。采用有限元法(FEM)或集中质量法在时域内对系泊系统进行动态分析。浮式平台的耦合运动方程如式(1)所示。
((1)) 式中:
直接时域耦合方法[22]直接在时域内求解波浪力,在每一时刻同时求解浮式平台和系泊缆索/立管的运动方程,计算简洁方便,无需过多的人工干预,但计算相对耗时。按照二阶摄动展开的时域方法,可以分别建立一阶、二阶浮式平台的时域耦合运动方程,如式(2)和式(3)所示。
((2)) ((3)) ((4)) 式中:
-
设计波参数的计算方法包括确定性方法和谱分析方法,其中确定性方法是比较常用的计算方法。设计波参数计算的确定性方法通过极限规则波波陡来确定设计波的波幅,其分析步骤如下:
第1步:确定各个典型波浪工况下的浪向和特征周期。
第2步:计算平台在各个典型波浪工况下的特征波浪荷载传递函数,波浪周期范围取为3~25 s,在特征周期附近步长取0.2~0.5 s,在其它区域可取1.0~2.0 s。
第3步:根据公式(5)计算各波浪周期所对应的极限规则波波高H。
((5)) ABS规范推荐的极限规则波波陡S为0.1,而DNV规范规定的极限规则波波陡为:
((6)) 式中:H100为百年一遇的最大极限波高。
第4步:将各个特征波浪荷载传递函数与波浪周期所对应的极限规则波波幅相乘。
第5步:选取第4步计算结果中最大值所对应的周期和波幅作为设计波的周期和波幅,进而可以在特征波浪荷载相频响应中得到该设计波的相位。
通过以上参数确定便可以进一步进行设计波浪荷载计算和结构强度评估。
-
确定了设计波参数后,就可以采用三维势流理论或耦合分析方法计算浮式平台的波浪荷载及运动响应,然后将波浪荷载传递到有限元模型上,采用准静态方法对平台结构进行有限元分析和强度评估[23-26]。
-
各船级社都对平台结构的总体强度分析做了要求。ABS船级社规范规定,当平台结构总体强度评估用于考核平台沉垫、立柱和撑杆等结构的屈服强度时,必须进行有限元分析。在有限元分析模型中,外板、甲板和舱壁等主要承载结构可以采用粗网格的壳单元,但主要结构的连接区域要采用较细网格的壳单元,所有的第二类承载构件可以采用梁单元。水动压力、静水压力及惯性力要施加到整体有限元模型上,并确保结构平衡,将计算得到的沉垫、立柱和撑杆等结构的总应力用于屈服强度校核。
-
为了避免结构模型发生刚体位移,必须在模型中施加一定的位移边界条件。根据实际情况,位移边界条件可以是刚性固定或者弹性固定。通常在结构强度较大且远离结构强度评估的区域选取不在同一条线上的3个节点,对每个节点分别施加位移边界条件:限制节点1的X、Y、Z三个方向位移;限制节点2的Y、Z两个方向位移;限制节点3的Z方向位移。
-
ABS船级社规定了平台结构分析的许用应力标准。许用应力的计算公式为:
((7)) 式中:Fy为材料屈服极限,FS为安全因子。
对于应力分量及由应力分量组合得到的应力,安全因子按照表1选取。对于板壳结构,采用等效应力进行校核,安全因子按照表2选取,等效应力σeqv表达为:
表 1 屈服应力安全因子
Table 1.
Safety Factor of the Yield Stress 工况 静水工况 波浪组合工况 轴向拉伸 1.67 1.25 弯曲剪切 2.50 1.88 表 2 等效应力安全因子
Table 2.
Safety Factor of the Equivalent Stress 工况 静水工况 波浪组合工况 等效应力 1.43 1.11 ((8)) 式中:σx为x方向的平面应力,σy为y方向的平面应力,τxy为平面剪应力。
-
浮式平台的波浪荷载预报一般采用基于三维势流理论的边界元方法。基于该理论的商业软件有美国麻省理工大学开发的WAMIT,挪威船级社开发的SESAM/WADAM,Century Dynamics公司开发的AQWA,以及法国船级社开发的HydroStar。浮式平台系统耦合分析的商业软件相对较少,主要有Texas A & M大学和Offshore Dynamics, Inc.公司联合开发的Harp,挪威船级社的SESAM/DeepC,以及AQWA软件中耦合分析模块。
结构有限元分析软件的开发已经比较成熟,可以选用的商业软件也比较多,如MSC公司的MSC/NASTRAN,ANSYS公司的ANSYS,以及ABAQUS软件等等。各个船级社也相应开发了自己的有限元分析程序,如DNV船级社的SESAM/SESTRA,ABS船级社的OSAP,中国船级社的海虹之彩等。
大连理工大学在深水浮式平台系统的水动力分析和耦合分析方面做了大量的研究工作,开发了水动力分析和耦合分析的程序。美国船级社的软件OSAP在结构评估方面有很强的优势。它们形成了一整套浮式平台系统设计分析的计算系统。下面分别对各个模块进行介绍。
1)水动力学模块。大连理工大学的水动力分析程序均采用基于三维势流理论的高阶边界元方法进行求解,WAFDUT和QTFDUT为频域模型,WATDUT为时域模型。WAFDUT计算线性传递函数和二阶平均漂移力,QTFDUT精确到二阶,可以计算二阶传递函数,求得和频力和差频力。WATDUT在时域内对流场和浮体的运动进行迭代求解,计算精度精确到二阶,可以得到二阶波浪力、运动响应、波面升高以及动水压力等结果。
2)柔性系统结构动力学模块。大连理工大学开发了基于三维结构动力学分析程序MoorDUT和RiserDUT,它们采用基于细长杆理论的有限元方法对系泊缆索和立管进行求解,数值分析的结果可以直接输出到耦合分析程序中对浮式平台系统进行耦合动态分析。
3)耦合分析模块。大连理工大学开发了对浮式平台系统进行全时域非线性耦合动态分析的程序CAPDUT,该程序结合了水动力学程序WATDUT和柔性系统结构动力学模块,按照用户定义的风浪流环境参数进行计算。以往的耦合分析模型大多采用间接时域方法,大连理工大学开发的耦合计算程序为全时域模型,波浪力的计算精确到二阶,具有原创性,有重要的研究意义和应用价值。
4)结构强度评估模块。美国船级社开发的软件OSAP可以根据水动力分析的结果进行设计波计算,并可将水动力荷载自动加载到有限元模型上,实现波浪荷载预报和有限元分析的无缝衔接。根据第三方有限元分析软件的计算结果,OSAP可以对结果进行后处理,并根据ABS规范对结果强度进行校核,为浮式平台的设计提供依据。
-
随着海洋工程向深水发展以及相应水动力学、结构动力学方法的研究深入,海洋工程模拟计算向高精度发展已成为趋势。新技术、新概念的开发应用是当今海洋工程发展的一大特点,将先进的计算手段应用于新的海洋技术有着重要意义。
本文对深水浮式平台系统设计分析的流程,设计分析过程中的具体问题和解决方法进行了介绍。重点论述了水动力分析中的非线性特点、阻尼的来源、柔性系统的求解方法、耦合方法、设计波参数的计算和平台结构强度评估方法。最后对浮式平台系统设计分析中的软件应用进行了介绍。
海洋工程深水浮式系统设计方法研究
DOI: 10.16516/j.gedi.issn2095-8676.2015.01.016
CSTR: 32391.14.j.gedi.issn2095-8676.2015.01.016
Research on Design Methods of Deepwater Floating Systems in Ocean Engineering
-
摘要:
深水浮式系统主要由浮式平台、系泊系统和立管系统组成,浮式平台及其系泊缆索/立管的设计分析是平台系统正常作业和运行安全的重要保障。浮式平台的设计一般通过在频域内对平台进行水动力分析,然后将水动力荷载传递到有限元模型上对结构进行有限元分析。利用水动力分析结果和有限元分析结果,结合规范联合对平台进行设计。同时,由于浮式平台整体系统的非线性及动力学特性,势必要对浮式平台系统进行有效的时域耦合分析计算,整体耦合响应结果除了用于平台和系泊缆索/立管系统的初步设计外,还可作为系泊缆索或立管的动态边界条件,对其进行详细设计。针对这两种设计分析思路,首先对分析流程、分析中遇到的具体问题和研究方法进行简单介绍,然后结合软件应用,对海洋平台以及系泊缆索和立管的设计分析步骤进行总结介绍。 Abstract:Deepwater floating systems are mainly composed of floating hull, mooring system and riser system. The design analysis of floating platform and mooring/riser is very important for normal operation and running safely. For the design of floating platform, the hydrodynamic analysis is usually performed in frequency domain, and then the hydrodynamic loads are transferred to the finite element model to execute structural FE analysis. The design of the platform can be performed by combining the hydrodynamic analysis results and finite element analysis results with national standards. In addition, effective coupled analysis of the floating system in time domain must be executed due to the nonlinearity and dynamic properties. The results of global response can be used for the initial design of platform and mooring/riser system, and also can be used in the detailed design with the results as the dynamic boundary conditions of mooring/riser. According to these two design ideas, this paper gives a brief introduction of analysis flow, special problems and solution methods, and then introduce the steps of analysis of platform and mooring/riser by combining application of software. -
Key words:
- coupled analysis /
- hydrodynamic analysis /
- deepwater floating platform /
- mooring /
- finite element
-
图 1 深水浮式平台系统设计分析流程图
Fig. 1 The Flow Chart for Design Analysis of Deepwater Floating Platform System
表 1 屈服应力安全因子
Tab. 1.
Safety Factor of the Yield Stress 工况 静水工况 波浪组合工况 轴向拉伸 1.67 1.25 弯曲剪切 2.50 1.88  下载: 导出CSV
下载: 导出CSV
-
[1] 杨敏冬. 深水浮式结构与系泊/立管系统的全时域非线性耦合动态分析 [D]. 大连:大连理工大学,2012. YANG Mindong. Full Time-Domain Nonlinear Coupled Dynamic Analysis of Deepwater Floating Structures and Mooring/Riser Systems [D]. Dalian:Dalian University of Technology, 2012. [2] 冯国庆,任慧龙. 船体结构疲劳评估的设计波法[J]. 哈尔滨工程大学学报,2005, 26(4): 430-434. FENG Guoqing, REN Huilong. Design Wave Approach for the Fatigue Assessment of Ship Structures[J]. Journal of Harbin Engineering University, 2005, 26(4): 430-434. [3] 肖桃云,樊佳,梅国辉,等. 基于设计波法的舰船整船有限元强度分析[J]. 舰船科学技术,2010, 32(6): 14-19. XIAO Taoyun, FAN Jia, MEI Guohui, et al. Strength Analysis of Overall Ship FEM Model Based on Design Wave Approach[J]. Ship Science and Technology, 2010, 32(6): 14-19. [4] 冯国庆,孙昊,刘冬平,等. 船舶结构疲劳评估设计波法[J]. 舰船科学技术,2012, 34(5): 41-46. FENG Guoqing, SUN Hao, LIU Dongping, et al. Research on the Design Wave Approach for the Fatigue Assessment of Ship Structures [J]. Ship Science and Technology, 2012, 34(5): 41-46. [5] EATOCK T R, HUNG S M. Second Order Diffraction Forces on a Vertical Cylinder in Regular Waves [J]. Applied Ocean Research, 1987, 9(1): 19-30. [6] KIM M H, YUE D K P. The Complete Second-order Diffraction Solution for an Axisymmetric Body. Part1: Monochromatic Incident Waves [J]. Journal of Fluid Mechanics, 1989(200): 235-264. [7] KIM M H, YUE D K P. The Complete Second-order Ciffraction Solution for an Axisymmetric Body. Part 2: Bichromatic Incident waves and body motions [J]. Journal of Fluid Mechanics, 1990(211): 557-593. [8] ISAACSON M, CHEUNG K F. Time Domain Second-order Wave Diffraction in Three Dimensions [J]. Journal of Waterway, Port, Coastal and Ocean Engineering, 1992, 118(5): 496-516. [9] 柏威. 非线性波浪与任意三维物体的相互作用[D]. 大连:大连理工大学,2001. BAI Wei. Nonlinear Wave Interaction with an Arbitrary 3-D Body [D]. Dalian: Dalian University of Technology, 2001. [10] 徐刚. 不规则波中浮体二阶水动力数值模拟[D]. 哈尔滨:哈尔滨工程大学,2010. XU Gang. Time-domain Simulation of Second-order Hydrodynamic Force on Floating Bodies in Irregular Waves [D]. Harbin: Harbin Engineering University, 2010. [11] WEBSTER W C. Mooring-induced Damping [J]. Ocean Engineering, 22(6): 571-591. [12] YANG Mindong, BIN Teng. Static and Dynamic Analysis of Mooring Lines by Nonlinear Finite Element Method [J]. China Ocean Engineering, 2010, 24(3): 417-430. [13] 乔东生,欧进萍. 深水复合锚泊线动力特性比较分析[J]. 船舶力学,2011, 15(11): 1290-1299. QIAO Dongsheng, OU Jinping. Comparative Analysis on Dynamic Characteristics of Deepwater Hybrid Mooring Line [J]. Journal of Ship Mechanics, 2011, 15(11): 1290-1299. [14] TCHEOU G. Nonlinear Dynamics of Mooring Lines [D]. Boston,USA:MIT,1997. [15] HUANG S. Dynamic Analysis of Three-dimensional Marine Cables [J]. Ocean Engineering, 1994, 21(6): 587-605. [16] KIM Namil, JEON Sangsoo, KIM Moonyoung. Nonlinear Finite Element Analysis of Ocean Cables [J]. China Ocean Engineering, 2004, 18(4): 537-550. [17] GARRETT D L. Dynamic Analysis of Slender Rods [J]. Journal of Energy Resources Technology, Transactions of ASME, 1982(104): 302-307. [18] RAN Z. Coupled Dynamic Analysis of Floating Structures in Waves and Current [D]. College Station,TX,USA:Texas A and M University, 2000. [19] 肖越,王言英. 三维锚泊系统时域计算分析[J]. 船舶力学,2005, 9(5): 8-16. XIAO Yue, WANG Yanying. Time-domain Analysis for 3-D Mooring System [J]. Journal of Ship Mechanics, 2005, 9(5): 8-16. [20] 周素莲,聂武,白勇. 深水半潜式平台系泊系统设计研究[J]. 船舶力学,2010, 14(5): 495-502. ZHOU Sulian, NIE Wu, BAI Yong. Investigation on Mooring System Design of a Deepwater Semi-submersible Platform [J]. Journal of Ship Mechanics, 2010, 14(5): 495-502. [21] TAHAR A, KIM M H. Coupled-dynamic Analysis of Floating Structures with Polyester Mooring Lines [J]. Ocean Engineering, 2008, 35(17-18): 1676-1685. [22] YANG M, TENG B, NING D, et al. Coupled Dynamic Analysis for Wave Interaction with a Truss Spar and Its Mooring Line/Riser System in Time Domain [J]. Ocean Engineering, 2012(39): 72-87. [23] 崔维成,刘涛,祁恩荣,等. 散货船疲劳强度校核的确定性方法[J]. 船舶力学,2000, 4(1): 36-49. CUI Weicheng, LIU Tao, QI Enrong, et al. Deterministic Fatigue Strength Assessment of Bulk Carriers [J]. Journal of Ship Mechanics, 2000, 4(1): 36-49. [24] 祁恩荣,庞建华,吴东伟. 半潜式平台极限强度可靠性研究[J]. 船舶力学,2011, 15(4): 371-376. QI Enrong, PANG Jianhua, WU Dongwei. Ultimate Strength Reliability for Semi-submersible Platforms [J]. Journal of Ship Mechanics, 2011, 15(4): 371-376. [25] ABS Rules for Building and Classing Mobile Offshore Drilling Units [S]. 2008. [26] Recommended Practice DNV-RP-C103 [S]. Column-Stabilised Units,2005. -

图(1) / 表 (2)
计量
- 文章访问数: 3949
- HTML全文浏览量: 295
- PDF下载量: 149
- 被引次数: 0








