

-
随着无人机技术的发展和广泛的应用普及,无人机在电网领域的应用已从电网前期勘察设计延伸到电网的运行维护。其应用领域、技术手段、关联延伸都有巨大的发展。无人机技术应用于电网巡检作业已经从探索阶段进入了快速的成长的阶段。传统的运检模式存在以下特点:(1)信息获取方式传统、来源单一;(2)设备状态感知仍以停电检修、离线实验为主;(3)在线监测、带电检修、机器人、无人机等先进手段的数据利用率不高。在此条件下,以“大云物移”现代信息技术为支撑的智能运检理念应运而生。无人机辅助电网巡检是基于智能装备的立体巡检体系的重要组成部分。基于无人机辅助电网巡检作业的应用现状与可能存在的发展方向,本文从通道巡视、树障巡视、杆塔精细化巡视、巡视数据管理与应用、异物清除五个方面进行阐述。
-
根据《架空输电线路运行规程》[1]规定,通道巡视是对线路通道、周边环境、沿线交跨、施工作业等进行检查。线路通道巡视对象包括:建(构)筑物、树木、施工作业、采动影响区、火灾、交叉跨越、防洪、排水、基础保护设施、道路桥梁、污染源、自然灾害等[2]。通道巡视可采用可见光视频拍摄或影像拍摄的方式采集走廊环境的地理信息数据。对于离散型分布的通道隐患,可采用分布式的多旋翼无人机巡视作业。对于集中性、连续性分布的通道隐患,可采用飞行速度高、作业时间长的固定翼无人机巡视作业。采用多选翼无人机巡视时,多选翼无人机与线路、杆塔的最小安全距离应大于2 m。采用固定翼无人机巡视时,固定翼无人机与线路、杆塔的最小安全距离应不小于100 m,离塔顶高度不得超过300 m。为提高作业效率,应保证线路杆塔坐标的准确性。如需生产线路走廊正射影像或快拼影像,对于影像纹理较差的区域,可采用单相机沿线往返飞行或组合倾斜相机单向飞行的方式。通道巡视可发现的隐患如表1所示。
表 1 通道巡视可发现的线路隐患
Table 1.
Hidden trouble of transmission line found by channel inspection 隐患分类 漂浮物隐患 危险施工隐患 火灾隐患 碰撞隐患 滑坡隐患 隐患明细 有危及线路安全的漂浮物 线路下方或附近有危及线路安全的施工作业 线路附近有烟火现象 在杆塔内(不含杆塔与杆塔之间)或杆塔与拉线之间修建车道 塔基保护区之外,水土流失 线路附近有人放风筝 采石(开矿) 有易燃、易爆物堆积 污染源 藤蔓类植物攀附杆塔等 目前,通道巡视被定义为在宏观上巡视线路走廊环境。无人机在作业时多采用自动飞行的方式,采用影像拍摄作业时自动拍摄的影像繁多、数据量大,采用视频拍摄作业时受限于图传的有效距离,无法在地面全程实时浏览视频数据。为提高巡视作业的实效性,在飞机返回地面后需要对视频或影像数据进行快速浏览分析,并大致确定一些紧急隐患(如火灾隐患)的地理位置。为实现该巡视要求,需要研究对影像或视频进行快速位置关联并自动生成报告的技术,以此实现重点部位隐患的快速再确认与详细排查等工作。
-
所谓树障隐患是指由于线路保护范围内的树木造成危及架空电力线路安全运行的情况,统称为树障隐患。树障事故指的是因树障问题造成的线路二级以上的电力事故事件[3]。利用无人机获取可见光影像进行树障测量是近几年新兴的技术。相比传统的树障测量方法,无人机可见光树障测量具有灵活、简单、可视性强等特点。随着激光雷达的技术发展,无人机已经可以搭载轻小型化的激光雷达设备进行树障巡视,虽然无人机激光雷达在测量精度上有优势,但其成本昂贵、操作复杂,需要专业团队才能完成。相比来说,无人机可见光树障巡视更加简单便携,安全可靠,在树障防控量测方面存在巨大优势。可见光与激光雷达在树障巡视方面的对比如表2所示。
表 2 可见光树障测量与机载激光雷达对比
Table 2.
Comparison of visible light and airborne laser 指标 无人机摄影测量 机载激光扫描 技术水平 技术研究成熟,自动化程度高数据产品成果丰富 技术新颖,相对不是十分成熟数据量庞大,自动化程度高 成本控制 成本较低 成本较高 操作实施 操作简易 操作复杂 人员是水平要求低 人员水平要求高 效率 高 低 测量精度 亚米级 公分级 根据《架空输电线路运行规程》[1]中的相关规定,导线在最大弧垂、最大风偏时与树木之间的安全距离如表3所示。
表 3 导线在最大弧垂、最大风偏时与树木之间的安全距离
Table 3.
The safety distance between trees and most arc sag, most wind deviation 线路电压/kV 66~110 220 330 500 750 最大弧垂时垂直距离/m 4.00 4.50 5.50 7.00 8.50 最大风偏时净空距离/m 3.50 4.00 5.00 7.00 8.50 根据上述安全距离衍生出了树障隐患等级,按隐患的严重程度分为紧急、重大、一般三个等级。目前尚无统一的行业标准对上述分类等级进行统一规定。假设不同电压等级下树木与导线之间安全距离(如表3所示)为D,国家电网公司在已有作业文件中规定树木与导线之间距离界于D和0.9D之间的定义为一般,距离界于0.9D和0.8D之间的定义为重大,距离位于0.8D以内的定义为紧急。而南方电网公司在已有作业文件中规定树木与导线之间距离位于D以内的定义为紧急,距离界于D和D+3之间的定义为重大,距离位于D+3和D+9以内的定义为一般。
当前的基于可见光树障量测的原理是基于摄影测量的共线方程,通过同名点的像方坐标和物方坐标解算近似悬链线方程的参数,进而拟合整条导线的空间位置。这种拟合算法精度取决于影像的空三解算精度及后续的同名点量测精度。由于导线弧垂受温度的影像变化较大,在当前的模拟计算公式中增加温度系数则会反衍多种温度条件下的导线空间位置,为线路运维工作提供更全面的参考依据。
-
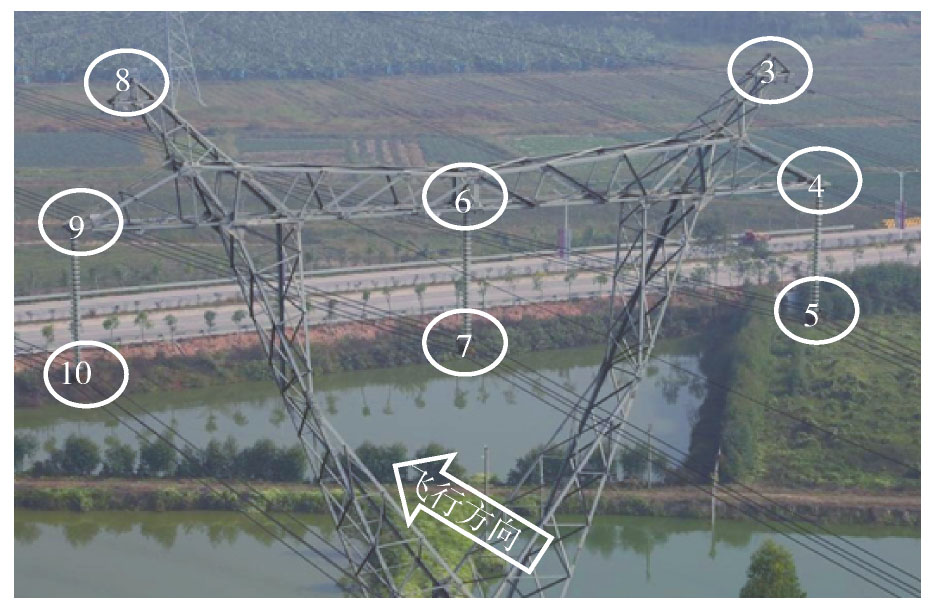
无人机精细化巡视是指对杆塔、塔基、导线、地线、接地装置、绝缘子及附属设置采集高分辨影像(可将光、红外)进行缺陷隐患分析的巡视手段[4]。精细化巡视在数据采集的方式上最大的特点是需要悬停、近距离拍摄。目前进行精细化巡视多采用多旋翼无人机进行,巡视时由人工手动控制飞机,同时通过实时图传判断拍摄的距离与时间。采用的传感器多为可变焦相机和红外、紫外设备。数据采集完后,需要对数据进行整理分析,目前基本是依靠人工判读分析缺陷隐患信息,并最终形成报告。不同塔形对拍摄位置有不同要求,以单回直线塔为例,拍摄要求如表4所示,拍摄部位如图1所示[5]:

图 1 单回直线塔可见光数据采集要求
Figure 1. Requirements of single-loop straight towe with visible light image
表 4 单回直线塔拍摄要求
Table 4.
Requirements of single-loop straight towe 拍摄顺序 拍摄对象 拍摄数量 备注 1 杆塔整体全景照片 1张 / 2 杆塔塔头 1张 / 3 右地线线夹 1张 含防振锤 4 右相绝缘子上连接处 1张 / 5 右相绝缘子下连接处 1张 含线夹、防振锤 6 中相绝缘子上连接处 1张 / 7 中相绝缘子下连接处 1张 含线夹、防振锤 8 左地线线夹 1张 含防振锤 9 左相绝缘子上连接处 1张 / 10 左相绝缘子下连接处 1张 含线夹、防振锤 11 杆塔塔基 1张 / 12 架空线路标牌(大号侧往小号侧巡时) 1张 杆塔号 为实现智能化巡检的目的,目前已有很多关于输电线路巡视路径优化的方法。李铭钧[6]等提出了基于查分纵横交错算法(DEDSO)同时兼顾杆塔风险概率的输电线路巡视路径优化方法。杨国田[7]等提出了一种改进的RRT*FN路径规划算法。程开文[8]等将巡视路径等效为不会到起点的标准旅行商问题(TSP)来解决。李力[9]引入一种基于模糊控制的超声波避障方法,建立无人机避障的模糊规则,实现巡视路径优化。上述方法多是考虑在电塔外部进行相对远距离拍摄的优化算法,且都以模拟实验来验证,考虑到现在精细化巡视的超近距离(米级)、复杂的杆塔设备及环境条件,尚无有效优化路径自动巡视方法。针对上述情况,我院提出基于学习模式和自动巡检模式共同完成精细化巡检作业的方法。该方法是基于具备RTK厘米级定位精度的多旋翼无人机,通过无人机智能控制终端在学习模式下记录飞行的轨迹和传感器执行的动作,记录的信息将会在自动巡检模式中作为飞行依据。在自动巡检模式中可以按照学习模式记录下来的信息进行自动化的巡视。该巡视方法可以有效解决复杂杆塔近距离精细化巡视的问题。但该方法也需要解决复杂环境下自动巡视无人机控制、强电磁环境的电力巡视高精度定位、航飞作业断点续飞等技术难题,以提高自动精细化巡视的安全性和效率。
-
无人机技术在电网巡视作业中的广泛应用提高了巡视作业的效率,提高了巡视质量。但无人机采集的数据具有高分辨率、高时效性、数据量大、重复周期短等特点,这就要求在获取数据后能够对数据进行及时、快速的分析与高效的管理。
-
近些年来随着计算机图像处理技术的不断发展,对于巡视影像智能化分析的要求越来越高。张洪才[10]将存在锈迹的彩色图像转化为灰度图像,提出超红色法对锈迹图像进行灰度化,并应用多张锈迹灰度图像进行最小二乘拟合确定锈迹缺陷的分割闭值范围,实现输电线路锈蚀缺陷自动识别。韩冰等[11]提出了一种融合多源信息的电力杆塔检测框架模型,自动检测杆塔的精确位置,判断杆塔的异常状态。张凤羽[12]基于OpenCV图形学、图像处理方法,提出针对异常巡检图中绝缘子掉串、输电线分叉和悬挂脏物提出了较好的识别方法。总之,图像处理技术的应用还主要集中于图像的稳定性及质量改善。而巡视的核心问题是状态监测与故障诊断[13]。该核心问题的智能化研究基本都是以目标提取与识别为基础,通过模式识别的方法进行故障诊断。该类方法可发现的缺陷隐患包括绝缘子污秽、爆裂、倾斜,中、大型塔材缺失、异物悬挂等。但智能化图像分析对原始影像的质量和精度要求高,且数据要适用于特定的算法,当前的研究也只能自动检测出某些缺陷隐患。
针对海量的原始数据,在当前的技术条件下,真正能够实现满足电网正常运维需求的影像处理与分析还应基于综合辅助型的人工智能分析系统。相关的辅助功能应包括以下几个方面:
1)建立缺陷数据库,并设计一套灵活、扩展性强的编码规范。实现图片、数据、缺陷库等输电线路精细化巡检图片及过程成果文件的编码标准化。
2)通过空间和时间特效将无人机原始照片进行时空聚类预处理,实现杆塔、回路、三相等三级照片分类,建立缺陷照片的线状拓扑管理。
3)提供可视化方式,辅助人工进行快速缺陷判别与分类;结合台帐、地理信息对设备缺陷进行分析,指导检修作业;自动生成图文并茂的缺陷报告,完成缺陷报告生成与管理。
-
针对巡视数据的特点,基于地理信息系统的综合管理系统成为智能化数据管理的首选。基于地理信息系统的综合管理系统能够支持无人机获取的海量原始数据,并能够将数据与实际空间位置相关联,支持多源、多时期的数据对比分析与集成应用,支持查询分析、三维可视化,实现巡视数据的科学管理。
基于智能立体巡检体系的要求,无人机巡检管理具有如下发展前景及方向:
1)建立基于大数据融合的数据中心。建立大数据分析中心,分析视频、激光点云、倾斜摄影、高清图片等海量数据,建立典型设备缺陷库和典型缺陷专家知识库,智能分析线路通道环境实时状况。
2)建立健全移动巡检作业闭环管理流程和技术支撑平台。建立无人机“巡检规划、巡检执行、故障检修、结果反馈”的全过程闭环管理流程,必应具备巡检数据只能化处理与辅助分析功能的统一平台为支撑,精益立体巡检体系管理。
-
由于输电线路分布点多面广,所处环境复杂恶劣,输电线路经常会发生异物(如塑料薄膜、建筑围网、警示带、气球、风筝、广告幅标、钓鱼线等)缠绕导地线的情况,危害输电线路正常运行。传统的异物清除方法可分为停电处理和带电处理。停电处理是检修人员通过滑梯、走线等设施人工到达异物的悬挂地点进行清除。带电处理多采用绝缘绳、杆、吊篮、软梯、绝缘斗臂车等辅助设施进行异物清除[14]。除此之外,一些其他的方式如输电线爬行烧除机、电动剪刀、机械异物清除器等研究也在进行。然而,上述一些方法存在清除时间长、操作复杂、危险性高等缺点,很难快速、高效、安全地清除异物。为改进异物清除效果,利用无人机搭载喷火装置消除异物的方法得到的快速的发展和应用。通过多旋翼无人机搭载除异物装置,利用图传数据准确控制无人机接近输电线上的异物,通过遥控器控制可燃气体(丁烷)发射,同时然控制产生电火花点燃可燃气体,利用火焰燃烧附着异物,实现异物清除的效果。
通过无人机搭载喷火装置相对于传统的方法提高了效率和安全性,但该方法也受限于天气条件(风、雨)。近几年随着激光技术的迅速发展,利用光纤激光器和CO2激光器的地面激光发射装置也开始应用于异物清除,通过选择合理的功率范围、合适的架设地点,可以实现大部分的异物清除同时又不损伤导线[15]。未来如果该类激光设备能够进一步缩小体积、减轻重量,则可搭载到巡检用的无人机中,实现更加精确、高效、安全的异物清除。
-
无人机辅助电网巡检作业是基于智能装备的立体巡检体系的重要组成部分,是当前巡检技术研究的重要方面。通过无人机辅助电网巡检作业可有效解决传统人工巡线工作量大、效率低、风险高,载人直升机巡线成本高、飞行审批程序复杂、作业环境受限多等问题。随着无人机行业应用技术的发展,无人机辅助电网巡检作业将为电网巡检提供一种安全、高效、全面的巡检模式,以满足电网日常巡检、故障巡视、应急抢险的需要。
无人机辅助电网巡检作业的应用现状与思考
DOI: 10.16516/j.gedi.issn2095-8676.2017.02.021
CSTR: 32391.14.j.gedi.issn2095-8676.2017.02.021
Application Status and Reflections of Electrical Network Inspection Aided by Unmanned Aerial Vehicle
-
摘要:
阐述了无人机辅助电网巡检作业的应用现状及未来的发展空间。根据已有的技术研究及实践应用,通过通道巡视、树障巡视、杆塔精细化巡视、巡视数据管理与应用、异物清除五个方面进行了分析与展望。研究表明:无人机辅助电网巡检作业技术已经从探索阶段进入了快速的成长的阶段,具有广阔的应用前景。 Abstract:The present development situation and future trends of electrical network inspection by unmanned aerial vehicle has been described in this paper. Analysis and prospect of electrical network inspection by unmanned aerial vehicle was made from channel inspection, tree obstacle inspection, fine inspection, management and application of inspection data and foreign body removal according to the existing technology research and practical application. The technology has entered a rapid growth stage from the exploration stage. Electrical network inspection by unmanned aerial vehicle enjoys promising application prospects. -
图 1 单回直线塔可见光数据采集要求
Fig. 1 Requirements of single-loop straight towe with visible light image
表 1 通道巡视可发现的线路隐患
Tab. 1.
Hidden trouble of transmission line found by channel inspection 隐患分类 漂浮物隐患 危险施工隐患 火灾隐患 碰撞隐患 滑坡隐患 隐患明细 有危及线路安全的漂浮物 线路下方或附近有危及线路安全的施工作业 线路附近有烟火现象 在杆塔内(不含杆塔与杆塔之间)或杆塔与拉线之间修建车道 塔基保护区之外,水土流失 线路附近有人放风筝 采石(开矿) 有易燃、易爆物堆积 污染源 藤蔓类植物攀附杆塔等  下载: 导出CSV
下载: 导出CSV
表 2 可见光树障测量与机载激光雷达对比
Tab. 2.
Comparison of visible light and airborne laser 指标 无人机摄影测量 机载激光扫描 技术水平 技术研究成熟,自动化程度高数据产品成果丰富 技术新颖,相对不是十分成熟数据量庞大,自动化程度高 成本控制 成本较低 成本较高 操作实施 操作简易 操作复杂 人员是水平要求低 人员水平要求高 效率 高 低 测量精度 亚米级 公分级
下载: 导出CSV
表 3 导线在最大弧垂、最大风偏时与树木之间的安全距离
Tab. 3.
The safety distance between trees and most arc sag, most wind deviation 线路电压/kV 66~110 220 330 500 750 最大弧垂时垂直距离/m 4.00 4.50 5.50 7.00 8.50 最大风偏时净空距离/m 3.50 4.00 5.00 7.00 8.50
下载: 导出CSV
表 4 单回直线塔拍摄要求
Tab. 4.
Requirements of single-loop straight towe 拍摄顺序 拍摄对象 拍摄数量 备注 1 杆塔整体全景照片 1张 / 2 杆塔塔头 1张 / 3 右地线线夹 1张 含防振锤 4 右相绝缘子上连接处 1张 / 5 右相绝缘子下连接处 1张 含线夹、防振锤 6 中相绝缘子上连接处 1张 / 7 中相绝缘子下连接处 1张 含线夹、防振锤 8 左地线线夹 1张 含防振锤 9 左相绝缘子上连接处 1张 / 10 左相绝缘子下连接处 1张 含线夹、防振锤 11 杆塔塔基 1张 / 12 架空线路标牌(大号侧往小号侧巡时) 1张 杆塔号
下载: 导出CSV
-
[1] 国家能源局. 架空输电线路运行规程:DL/T 74—2010 [S]. 北京:中国电力出版社,2010. National Energy Administration. Operating code for overhead transmission line: DL/T74—2010 [S]. Beijing:China Electric Power Press,2010. [2] 邓元婧,汪从敏,夏开全. 架空输电线路通道环境的巡视技术与应用 [J]. 浙江电力,2014(8): 28-31. DENG Y J, WANG C M, XIA K Q. Inspection technology for channel environment of overhead transmission line and its application [J]. Zhejiang Electric Power,2014(8): 28-31. [3] 刘世林. 浅谈防止高压输电线路树障事故的对策 [J]. 中国高新技术企业,2015(36): 135-136. LIU S L. Discussion on Countermeasures of preventing high voltage transmission line fault [J]. China High Tech Enterprise,2015(36): 135-136. [4] 杨喆,邓超怡. 无人机在特高压输电线路巡检中的应用研究 [J]. 南方能源建设,2016,3(增刊1): 135-138. YANG Z, DENG C Y. Research and application of UHV transmission line inspection based on unmanned aerial vehicle [J]. Southern Energy Construction,2016,3(Supp.1): 135-138. [5] 南方电网有限公司. 架空输电线路机巡作业标准(试点) [R]. 广州:南方电网有限公司,2016:6-10. China Southern Power Grid Co., Ltd. Overhead transmission line patrol operation standard(pilot) [R]. Guangzhou: China Southern Power Grid Co., Ltd., 2016:6-10. [6] 李铭钧,甘团杰,赖奎. 考虑杆塔风险概率的输电线路巡检路径优化方法 [J]. 电网与清洁能源,2016,32(10): 61-67. LI M J, GAN T J, LAI Q. Power Transmission line inspection planning optimization considering risk probabilities of steel towers [J]. Power System and Clean Energy,2016,32(10): 61-67. [7] 杨国田,苏荣强,吴华,等. 基于四旋翼无人机的杆塔巡检路径规划的研究与优化 [J]. 华中科技大学学报(自然科学版),2015,43(增刊1): 324-327. YANG G T, SU R Q, WU H,et al. Power tower inspection patch planning of flying robot [J]. J. Huazhong Univ. of Sci. &Tech. (Natural Science Edition),2015,43(Supp. 1): 324-327. [8] 程开文,代晓光,凡福华. 飞行机器人的电力杆塔巡检路径规划 [J]. 电子技术与软件工程,2016(13): 144-144. CHENG K W, DAI X G, FAN F H. Path planning for power tower inspection of flying robot [J]. Electronic technology and software engineering,2016(13): 144-144. [9] 李力. 无人机输电线路巡线技术及其应用研究 [D]. 长沙:长沙理工大学,2012. LI L. Research on the technology and application of power line inspection with unmanned aerial vehicles [D]. Changsha: Changsha University of Science & Technology,2012. [10] 张洪才. 直升机巡检输电线路锈蚀缺陷识别方法研究 [D]. 辽宁:大连海事大学,2009. ZHANG H C. The method research on rusty defect identification of inspecting transmission line by helicopter [D]. Liaoning: Dalian Maritime University,2009. [11] 韩冰,尚方. 面向无人机输电线路巡检的电力杆塔检测框架模型 [J]. 浙江电力,2016,35(4): 6-11. HAN B, SHANG F. A frame model of power pylon detection for UAV-based power transmission line inspection [J]. ZHEJIANG ELECTRIC POWER,2016,35(4): 6-11. [12] 张凤羽. 基于计算机视觉的输电线路异常巡检图的识别和研究 [D]. 吉林:吉林大学,2015. ZHANG F Y. Recognition and research of anomaly map of transmission line inspection based on computer vision [D]. Jilin:Jilin University,2015. [13] 仝卫国,苑津莎,李宝树. 图像处理技术在直升机巡检输电线路中的应用综述 [J]. 电网技术,2010,34(12): 204-208. TONG W G, YUAN J S, LI B S. Application of image processing in patrol inspection of overhead transmission line by helicopter [J]. Power System Technology,2010,34(12)204-208. [14] 王昌幼. 输电线路导地线异物处理方法 [J]. 青海电力,2014,33(1): 20-22. WANG C Y. Treatment Method of foreign objects on grounding conductor for transmission line [J]. Qinghai Electric Power,2014,33(1): 20-22. [15] 梁伟,陈杰,刘洋,等. 清除架空线路异物的新型装置及其试验研究 [J]. 电气设备,2015(9): 57-59. LIANG W, CHEN J, LIU Y. Research on laser removal technology of foreign bodies on overhead lines [J]. Electrical Equipment, 2015,(9): 57-59. -

计量
- 文章访问数: 2504
- HTML全文浏览量: 300
- PDF下载量: 103
- 被引次数: 0
