

 下载:
下载:
-
随着社会经济的发展、海底资源的大力开发,国家在海洋设备、海洋工程上的投入非常大,各种海底线缆工程、管道工程、桥隧工程,以及近岸的港池工程等陆续立项开工,诸多海岛填海造陆和各种联网,以及海洋环境、资源调查和保护等,市场的现状已经成规模,前景也明确广阔。海洋工程无论是前期调查还是后期的运维检测都与陆上作业不同:海洋勘察属于装备依托型业务,需要船舶和ROV(Remote Operated Vehicle,简称水下机器人)等专业设备作为基本的作业平台。然而,目前国内外海洋施工大都采用DP船进行高精度定点作业,但由于DP船造价极其昂贵的缺点,部分海洋施工采用远距离抛锚进行海上定位施工以节约成本,如海床钻机,而实际工作中,海洋抛锚具有其相对局限性,如远距离抛锚影响航道、部分区域无法抛锚、船锚对海底电缆、管道造成安全隐患等[1,2]。
针对海域ROV需要以工作船为工作平台及DP船造价昂贵的特点,本文提出以非动力定位平台与水下机器人相配合的方式进行作业,以造价相对低廉的成本实现DP船的作业效果,该工作方式较适用于海底各种电缆、管线监测保护现状,跟踪路由,探测埋深以及目标体监测等工作。以较低的成本定期检测海缆、管线及其他目标体的的损坏情况,从而降低风险、节约成本、提高经济效益。
-
动力定位(DP)是海洋工程船舶的一种定位方法,先用声呐测定船位,再利用船上的自动控制系统,发出指令,控制安装在船首、船尾的侧向推进器,来固定船位。动力定位系统由位置传感器、风传感器、海流传感器、航向传感器、姿态传感器、等实时采集数据,将这些数据信息瞬时传输给计算机,计算机通过将数据信息与预设的停泊位置资料对照并找出差别,继而向各推进器发出指令调整推力及推向,实行差别修正,直至到达预定位置[3,4]。
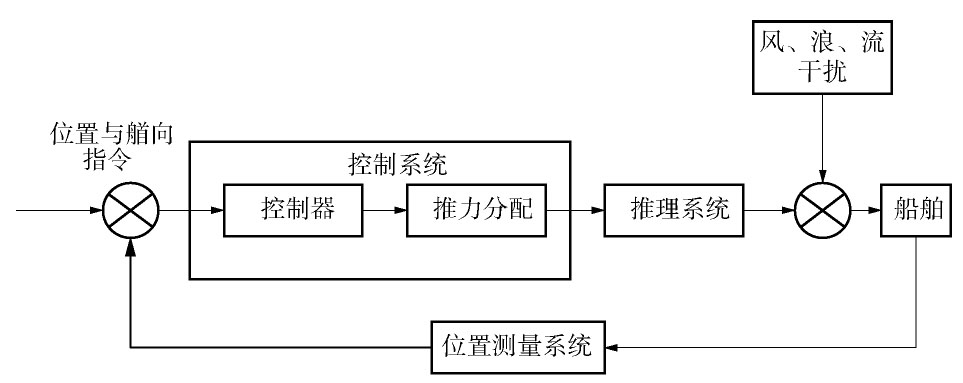
动力定位系统的构成:

图 1 动力定位系统框架图
Figure 1. Dynamic positioning system frame diagram
动力定位系统的主要工作流程如下:
1)计算机处理位置传感器、风传感器、海流传感器、航向传感器、姿态传感器、等实时采集数据信息,计算出船舶实际位置与船首方向。
2)将实际的位置与预设位置资料相比较,生成位置偏差信息。
3)结合风力及力矩计算恢复预设位置所需要的推力和力矩。
5)根据位置偏差信息及推力优化分配步骤,形成指令控制各个推进器得推力转速及方位角。
-
相对动力定位平台,非动力定位平台是通过人工干预手段对船体姿态、位置进行有目的、有效的控制,使船舶按照期望的方式运动或保持,从而保证非动力定位平台和水下机器人完成配合动作,以避免非动力定位平台不受控制而导致非动力定位平台失去对水下机器人的控制,甚至发生脐带缆断裂而丢失水下机器人的风险。
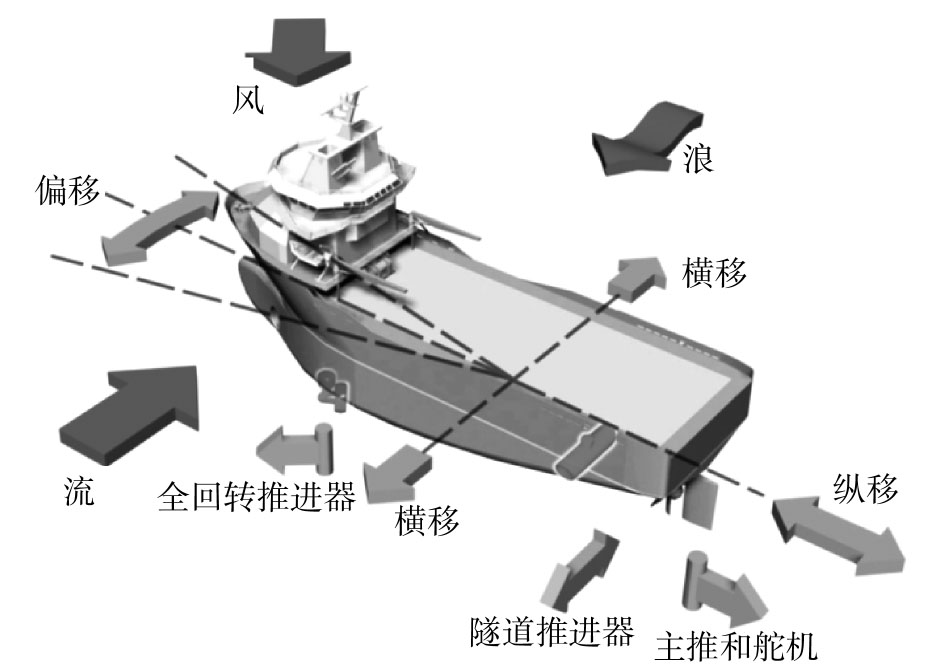
非动力定位平台因为受到各种力的作用而运动,船舶运动姿态是由引起船舶相应的姿态变化的力和力矩而引起的,而引起力和力矩变化的因素主要有:风力、流和波浪。风力主要作用与船水面以上部分,其数值与船的侧投面积有关。同时与船首方向也有关;流主要作用船只水面下部分表面,其影响相对较为简单,将不均匀流产生的流力分成不等的均匀流场,从而可看成船只随着各个不同的均匀流场动力学漂移的叠加[4,5,6,7,8,9]。
波浪主要作用船只水面下部分表面,由水面往下其作用力逐渐变小,其作用力较为复杂,与海流波普有关。

图 2 船体所受基本外力影响
Figure 2. Hull subjected to basic external forces
故如何在各种海洋干扰力影响下使船舶偏离期望位置之后能迅速归位是非动力定位平台设计需要解决的核心问题,从而达到非动力定位平台和水下机器人自适应匹配完成工作的目的。
-
非动力定位平台与ROV自适应匹配过程中,起决定性因素的是非动力定位平台,因此对非动力定位平台进行选型显得尤为重要,需从非动力平台的推进、阻力、横摇、稳性进行选型,通过研究发现。双体船较适合作为ROV配套的非动力定位平台[10,11,12]。
-
推进器系统是非动力定位平台的核心部件之一,其在定位过程中主要产生推力及力矩,以便抗衡作用在船上的用于产生力和力矩,来平衡作用在船上的干扰力和力矩,使非动力定位平台能保持预设方向固定在指定位置。由于单个推进器产生的推力及方向及其有限,故需要安装多个推进器(包括舰首侧推)以满足非动力定位平台的操作可靠性,同时需要安装全回转推进器进而满足非动力定位抬头的任意方向所需要的推力及力矩[13]。
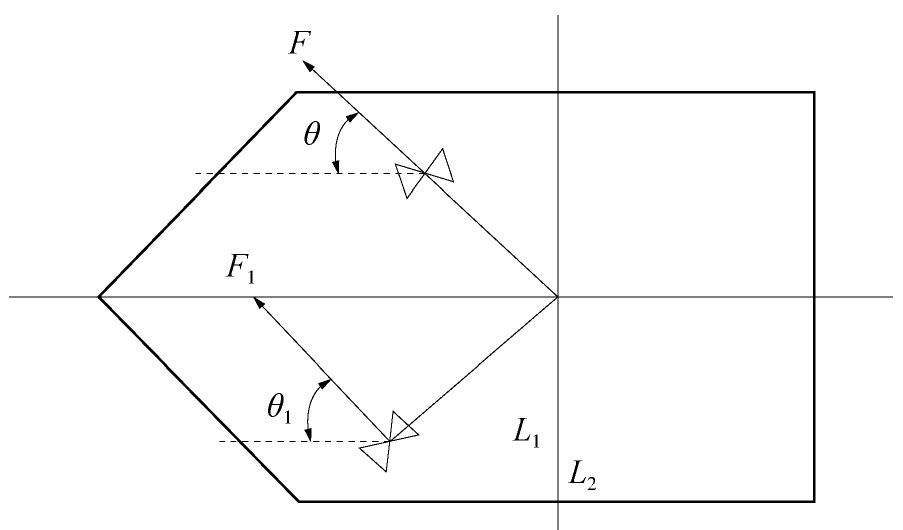
图3是一个使用两个定轴推力器的系统,其形成的平衡方程如下:

图 3 简单推力器布置示意图
Figure 3. Schematic diagram of simple thruster layout
((1)) 式中:Fx、Fy为x、y方向需要的力;Mz为反力矩;F1、F2分别为第一和第二台推进器的推力。若增加一台推进器,则力和力矩方程变化为:
((2)) 从而得到定轴三推进器中的每一台推进器的推力值为:
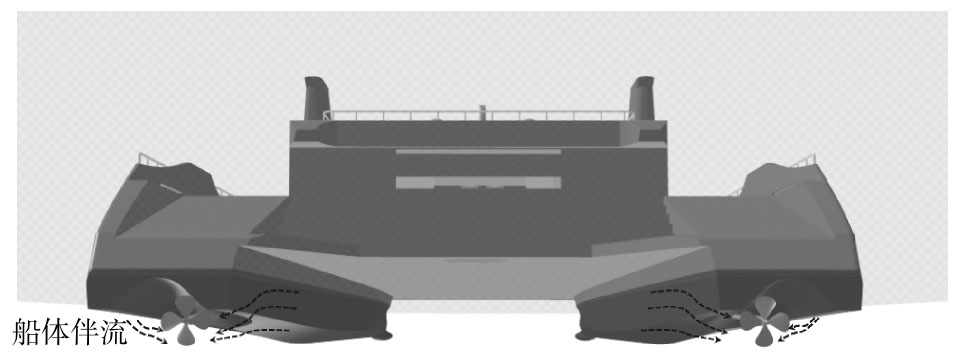
((3)) 双体船由于浆盘位于每个片体的中心线处,相比于双桨单体船桨盘位于船中两侧,中心线处船体伴流的速度更大,桨的工作效率也更大。同时,在艇尾设置了隧道,能够进行提升桨的推进效率。因此,采用相同推进方式的情况下,双体船的推进效率要远优于常规船型。
-
相比于相同排水量的单体船,双体船的船体被分成两个片体,每个片体都具有较大的长宽比,这有利于减小船体兴波,进而降低兴波阻力和形状阻力[14],如图4所示;同时两片体所产生兴波还会在船体中央产生兴波干扰,在一定的航速下,这种兴波干扰可以进一步降低兴波阻力,如图5所示。

图 4 双体船推进优势示意图
Figure 4. Catamaran advancing advantage diagram

图 5 双体船航行过程中兴波示意图
Figure 5. Catamaran sailing process ZTE wave diagram
-
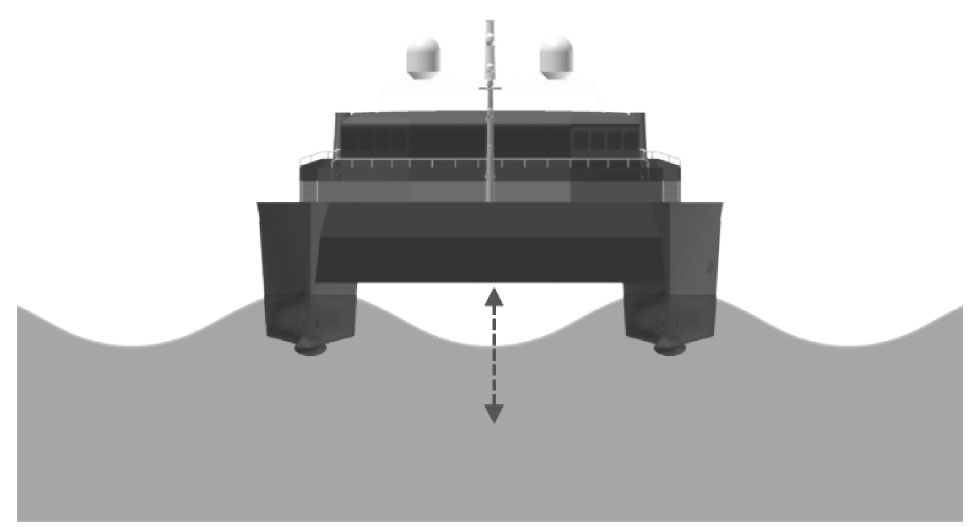
双体船横摇固有周期很短,其横摇特点是:
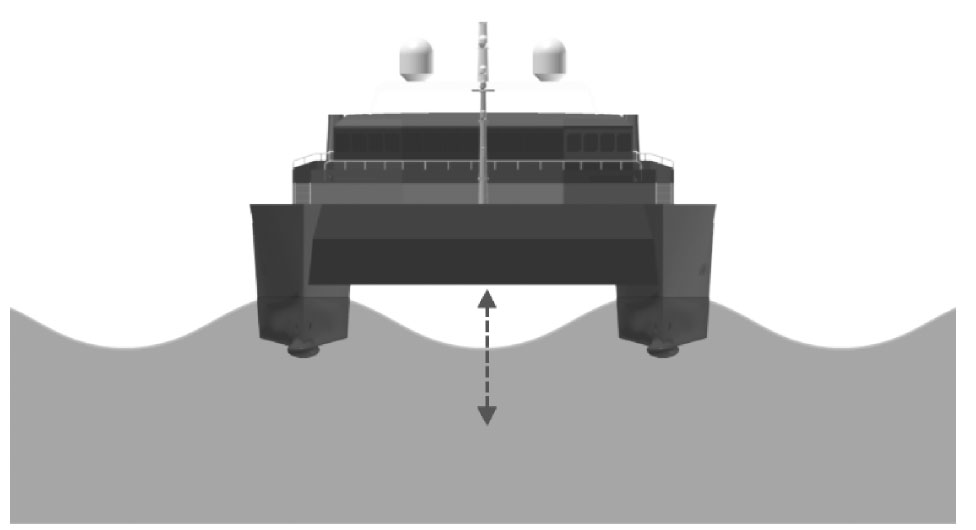
当波长与双体船片体间距等同时,双体船两个片体将同时处于波峰、波谷或者波的其他等高位置上,双体船将只随波浪起伏做升沉运动,而不是做倾斜摇摆运动[15],如图6所示。

图 6 横向波长接近船宽时船体横摇示意图
Figure 6. The horizontal wavelength is close to when the roll beam diagram
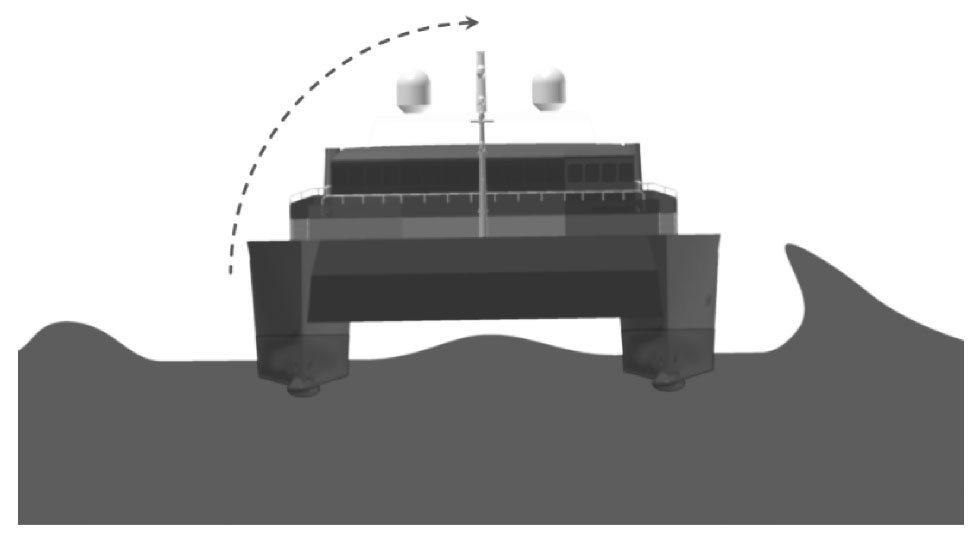
双体船在较大风浪中最大横摇角等于最大波面斜度180 h/λ(波浪波度比),由于长波的h/λ≥20(我国沿海多此海况),则双体船的最大横摇角≤9°;在强浪中,双体船将很快地从横摇中回复原状,而单体船会继续摇摆并与第二个强浪叠加,在海域中,双体船的横摇阻尼系数比单体船大4~7倍,其抗摇摆性能较好,如图7所示。

图 7 恶劣海况下横摇示意图
Figure 7. Bad weather rolling diagram
此外,对于双体船,可将水下机器人回收系统设于甲板中央,水下机器人回收时则处于两侧片体的围蔽区域内。该设计的优点在于:两侧片体类似于两个刚性挡板插入海中,可有效减少横向波浪对片体内流动的影响,为水下机器人的回收提供了稳定的海洋环境,降低了回收作业操作难度;同时,两侧片体之间距有足够宽的水域,即使水下机器人在回收过程中产生晃荡,也很难与船体发生碰撞,从而提升了回收作业的安全性。
-
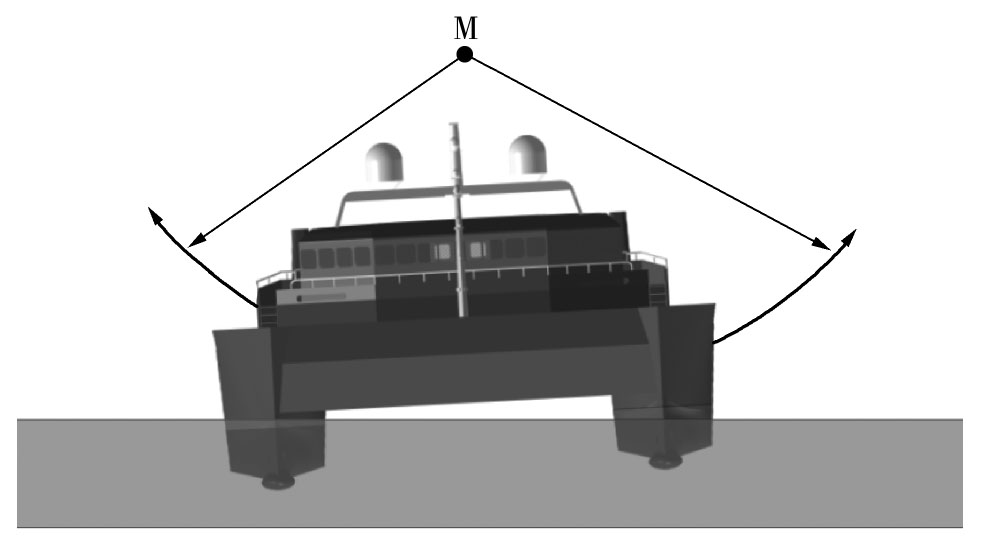
稳性主要表征船在受到外力发生偏离之后能够自行回复到原平衡位置的能力,它直接影响道船体在波浪中的横摇性能。良好的稳性是非动力定位平台的基础,关系到ROV布放与回收的安全。
双体船船体的水线面由相距较远的两部分组成,使水线面的横向惯性矩大大增加,由于横稳性半径=水线面横向惯性矩/排水体积,因此双体船型的稳心半径较常规单体船型大的多,其稳性也相对较好,在静水中横摇衰减很快,在不规则海面上摇摆容易减缓,有利于综合保障平台维持作业中的稳定,方便ROV的释放与回收。同时其复原力矩也更大,稳定储备比单体船大2~4倍,如图8所示。

图 8 双5体船稳性示意图
Figure 8. Schematic diagram of catamaran stability
综上,相对单体船,双体船在推进器设计、抗阻力、抗横摇及稳定性方面都优于单体船。从节约成本的角度上出发,摒弃DP船;从安全角度上最优化选择,双体船从结构及技术成熟性以及造价方面都是最优选择。
-
非动力定位平台为了与ROV更好的自适应匹配,除了有合适的船型外,还需要从操作要点、控制距离、坐标范围、侧推、移动位置要求、通讯、水下机器人稳定操作摇摆幅度过大后的处理方式入手。因此在船的结构设计时,在保障必要的航海海时间、安全航行工作的条件下,尽量减小排水量,依据一些特殊的方法进行运动控制、选择先进的投放回收手段和先进的船舶理论与理念,提供一新颖的非动力定位系统海洋保障平台显得尤为重要。为使得非动力定位平台与ROV更好的自适应匹配,需在非动力定位平台配件进行以下选型及改造:
-
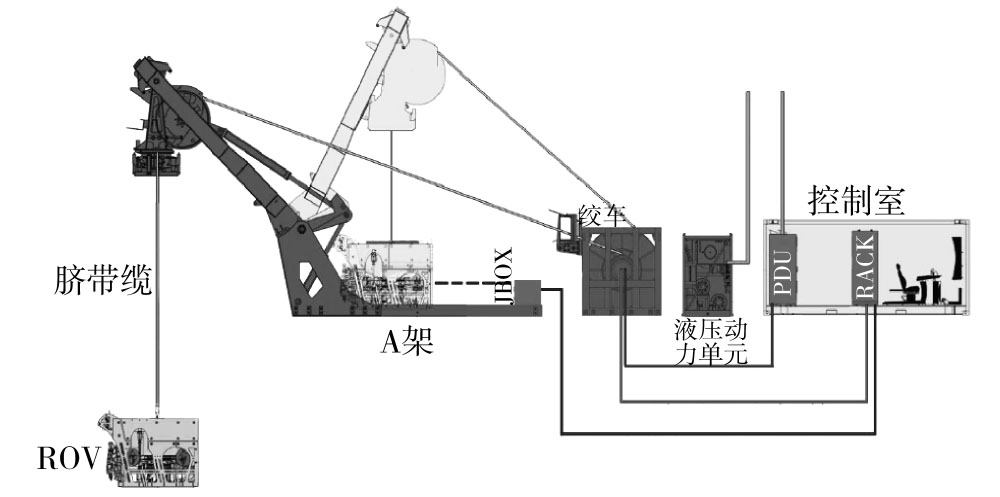
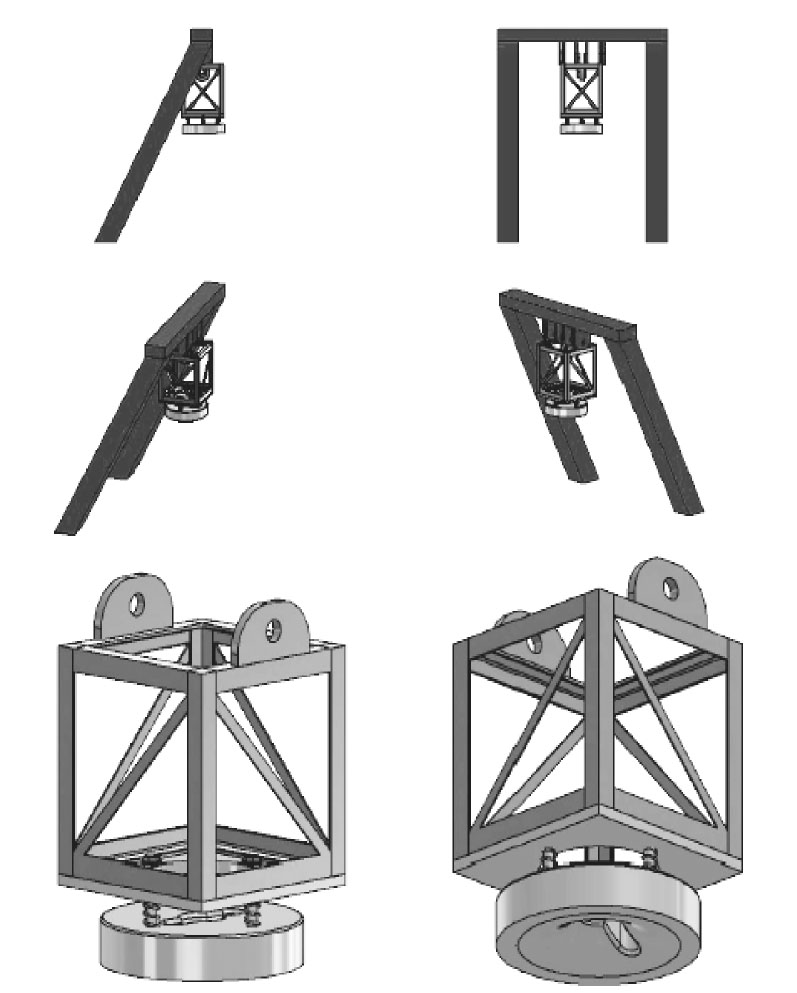
水下机器人收放系统结构形式不同,收放能力跨度大。其中吊臂收放系统结构简单,对船只要求低,但起吊能力有限,且其稳定性稍差;舷侧伸缩式收放系统相对稳定,但其结构复杂,造价昂贵,对船的要求高;A形架式收放系统增强了起吊设备与母船甲板间的连接强度,提高装置在回收时的稳定性,安装灵活、性价比相对合理,更符合非动力定位平台工作需求,如图9所示。

图 9 A形架式收放系统的作业过程示意图
Figure 9. Schematic diagram of A-type retractable system operation
此外,增加固定框架结构。脐带缆通过锁定机构与收放系统连接,锁定机构采用圆锥定位方式,在水下机器人提升到位时引导其达到A形架门吊的锁定位置和姿态,自动将水下机器人与收放系统固定,避免回收过程中出现大幅度摇晃。
非动力定位平台不稳定,容易摇摆,因而有应用更多提高其调整能力的技术需求,可以通过波浪补偿、止荡保护、固定框架结构等技术手段来弥补船舶摇晃带来的问题。
-
水下机器人在收放过程中通过A架的摆动把水下机器人送至船舷外部,然后通过放缆把水下机器人送至水下。在此过程中由于非动力定位平台不是很稳定,容易摇摆。解决船舶摇晃主要从两方面入手:一是削弱船体的运动,尤其是垂向的升沉运动,主要依靠在前期的设计过程中对船体构型进行优化调整,以及增设减摇鳍等附体来减小船体在波浪中的运动响应;二是对船体运动造成的钢缆复杂的变化进行波浪补偿,即对收放装置进行波浪补偿,安装波浪补偿系统,如图10所示。

图 10 潜水系统补偿装置
Figure 10. Diving system compensation device
-
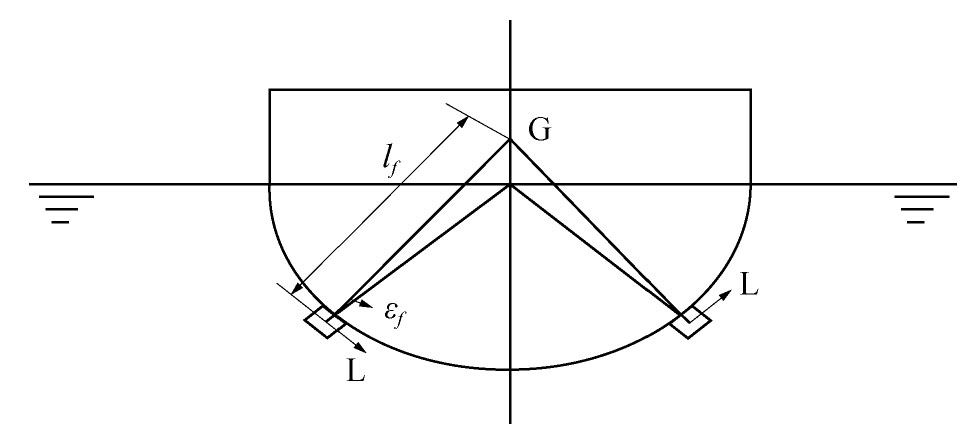
减摇鰭是一种较为常用的主动式的减摇装置[16],其原理是船舶运行产生横摇的时候通过船体外部的鳍产生升力,从而形成稳定力矩,抵消船只航行中产生横摇的干扰力。减摇鰭在中高速航行过程中的减摇效果能达到90%以上。减摇鳍的位置与结构如图11所示。

图 11 横摇稳定力
Figure 11. Roll stability
在非动力定位平台安装减摇鳍,会更好的增加船只航行稳定性。
-
为更好的使得非动力定位平台与ROV自适应匹配,需增设设甲板通讯系统,可实时通话,保持沟通畅顺;驾驶台上具有水下机器人的视频和超短基线的显示;同时增设综合导航系统,以图形方式实时显示水下机器人坐标位置、运动轨迹及显示预设的路由轨迹,并可放大与实际轨迹相比较,显示两者之间偏差。
-
采用非动力定位工作平台,ROV的工作过程为:
1)ROV下水检查,测试和准备工作。
2)将超短基线的换能器放到放置水中,通知驾驶台ROV准备下水作业。
3)ROV作业人员与驾驶台的配合。ROV各岗位和驾驶台之间设置有一套甲板通讯系统,可以实时通话,保持沟通畅顺;驾驶台上具有ROV的视频和超短基线的显示。
4)起动ROV吊放系统,把ROV放入水中。
5)在船摇摆较缓和条件下ROV下水。在接近海底时,ROV寻找目标体。
6)在作业的位置,将超短基线的换能器放到水中,在超短基线对应的电脑上将要检查的目标体路线画出来,在起始检测点以半径为25 m画一个圆,让母船稳定在圆内。
7)操作员根据ROV的移动,不断地画出新圆的位置,让母船变更船位。驾驶员根据显示器上的显示,让船与ROV保持相对接近的位置。ROV慢慢向前移动,船也是慢慢向前移动,动作需要平稳,不能有太大的动作。
8)ROV在作业时,采用自动定高方式,离开海底约20 cm。ROV受到与移动成90 °的水流推力,不利于ROV的操作,需采取ROV顶流方式,侧移前进。
9)ROV作业完成,通知驾驶台ROV准备出水。
10)将ROV回收到甲板,进行相关的清洗绑扎工作。
-
本文针对DP船造价昂贵的特点以及船只抛锚定位的局限性,提出采用非动力定位平台配合水下机器人进行海底作业。针对非动力定位平台选型问题以及与ROV配合操作流程进行了论证。
1)本文对非动力定位平台进行了选型。相对常规单体船型,双体船型更适合作为ROV匹配的非动力定位平台。
2)论文从非动力平台的推进、阻力、横摇、稳性进行论证,论述了双体船的稳性及安全性。
3)论文从收放系统、波浪补偿技术、减摇鳍技术及通讯导航系统的增设,增强了非动力定位平台与ROV自适应匹配的可行性;论文同时论述了水下机器人与非动力定位平台操作流程。
4)通过各方调研及理论论证,论证了非动力定位平台与水下机器人配合工作的可行性,为后续海洋施工及业务拓展的可行性方案提供依据,同时也为非动力定位平台的设计及研发提供了参考依据。
海底电缆检测中ROV与非动力定位平台自适应匹配
DOI: 10.16516/j.gedi.issn2095-8676.2017.02.023
CSTR: 32391.14.j.gedi.issn2095-8676.2017.02.023
Adaptive Matching of ROV and Non-dynamic Positioning Platform in Submarine Cable Detection
-
摘要:
针对海底电缆检测过程中DP船造价昂贵的特点以及普通船只抛锚定位的局限性,提出采用非动力定位平台配合水下机器人进行海底作业的方式。根据实际需求,从动力定位船原理出发论述了非动力定位平台的选型、与水下机器人之间的配合操作流程,论证了双体船作为非动力定位平台与水下机器人自适应匹配的可行性,为后续海洋施工及运维检测的可行性方案提供依据,同时也为非动力定位平台的设计及研发提供了参考依据。 Abstract:Aiming at the characteristics of high cost of DP vessel in the detection process of submarine cable and the limitation of anchoring location of common ship, a non-dynamic positioning platform for underwater robot is proposed. According to the actual demand, and the principle of dynamic positioning, the selection of non-dynamic positioning platform and operation process of underwater robot are discussed, besides, the feasibility of adaptive matching between catamaran as a non-dynamic positioning platform and underwater robot, is also demonstrated. That could provide the basis for the feasibility of construction and operation and maintenance of marine subsequent detection, and also provides the reference for the design and development of non-dynamic positioning platform. -
Key words:
- non-dynamic positioning platform /
- DP vessel /
- ROV
-
图 6 横向波长接近船宽时船体横摇示意图
Fig. 6 The horizontal wavelength is close to when the roll beam diagram
-
[1] 王裕霜. 海底电缆抛石保护工程建设综述 [J]. 中国电力教育,2012(3): 51-56. WANG Y S. Construction summary of riprap protection of submarine cables [J]. China Electric Power Education,2012(3): 51~56. [2] 马兆荣,刘晋超,元国凯. 珠海桂山海上风电场风电机组基础设计 [J]. 南方能源建设,2015,2(3): 72-75. MA Z R, LIU J C, YUAN G K. Design of wind turbine supporting structure in Zhuhai Guishan offshore wind farm [J]. Southern Energy Construction,2015,2(3): 72-75. [3] 杨剑涛,徐国华,程小亮. 一种AUV自主采样控制技术的研究与实现 [J]. 电子测量技术,2010,33(11): 5-9. YANG J T, XU G H, CHENG X L. Research and implementation of AUV's autonomous sample control technology [J]. Electronic Measurement Technology,2010,33(11): 5-9. [4] 周利. 半潜式钻井平台动力定位推力系统理论设计及模型试验研究 [D]. 上海:上海交通大学,2009. [5] 王亮. 深海半潜式钻井平台动力定位能力分析 [D]. 上海:上海交通大学,2010. [6] 杨世知. DP推进系统水动力干扰及最优推力分配算法研究 [D]. 上海:上海交通大学,2010. [7] 王琼. 船舶动力定位系统的优化与控制策略研究 [D]. 大连:大连海事大学,2013. [8] 吴文彬. 半潜船动力定位系统建模及仿真研究 [D]. 武汉:武汉理工大学,2010. [9] 雷正玲. 船舶动力定位系统的自抗扰控制研究 [D]. 大连:大连海事大学,2014. [10] 唐丰. 新型双体船和三体船阻力性能研究 [J]. 船舶,2007(2): 1-4. TANG F. Research on numerical prediction method for wavemaking resistance of catamaran/trimaran [J]. SHIP&BOAT,2007(2): 1-4. [11] 周翀剑,柳存根,汪学锋,等. 高速双体船阻力估算方法研究 [J]. 中国造船,2014,55(4): 26-32. ZHOU C J, LIU C G, WANG X F,et al. Research of resistance estimation method for high-speed catamaran [J]. Shipbuilding of China,2014,55(4): 26-32. [12] 陈雪深,邵世明,陈国权,等. 双体船稳性衡准中的横摇角公式 [J]. 上海交通大学学报,1997,31(2): 30-33. CHEN X S, SHAO S M, CHEN G Q,et al. The formulae of rolling angle in stability criteria for catamarans [J]. Journal of Shanghai Jiaotong University,1997,31(2): 30-33. [13] 赵志高,杨建民,王磊,等. 动力定位系统发展状况及研究方法 [J]. 海洋工程,2002,20(1): 91-97. ZHAO Z G, YANG J M, WANG L,et al. The development and research method of dynamic positioning system [J]. The Ocean Engineering,2010,33(11): 5-9. [14] 王轶赓. 高性能船总体性能计算方法研究 [D]. 大连:大连海事大学,2014. [15] 王庆. 500客位穿浪双体船船型优化与设计 [D]. 哈尔滨:哈尔滨工程大学,2001. [16] 刘忠伟. 船舶减摇鳍智能控制及其模拟系统的研究 [D]. 大连:大连海事大学,2012. -

图(11)
计量
- 文章访问数: 441
- HTML全文浏览量: 105
- PDF下载量: 27
- 被引次数: 0



