

-
根据沙特的“2030愿景”计划,沙特政府已经启动了国家可再生能源计划(NREP),光伏等可再生能源将在其中扮演重要角色[1]。沙特阿拉伯具有丰富的光照资源、广阔的沙漠面积、稳定的政策支持、巨大的市场需求、先进的技术支持以及有利于环境保护等优势,使其成为光伏发电的理想地。
沙特沙漠广布,虽然光照资源丰富,但光伏电站长期受到沙尘侵扰。据SolarAnywhere统计,2006~2020年间,该地区未能定期清扫的光伏电站年灰损高达35% ,严重影响电站发电效率。据国际能源署(International Energy Agency,IEA)预测,仅沙特在2023年的灰损将高达7千万欧元,经济损失不容小觑[2]。然而在中东地区普遍高温的自然条件下,人工清洗光伏组件既昂贵又操作不便。同时,中东地区特有的高湿度环境,使得沙尘、灰尘等污染物极易与水汽结合,长期不清扫下,形成黏结状污染物,对光伏组件造成不可逆转的伤害[3]。因此,中国能建承建的沙特阿尔舒巴赫2.6 GW光伏项目用智能清扫机器人对光伏电站进行高频次、全自动的清洗。
-
手动清扫机器主要包括刷子、拖把等,适用于小型光伏电站或分布式光伏发电系统。手动清扫机器操作简便,但工作效率较低,清扫效果受操作人员技能水平影响较大。
-
半自动清扫机器主要包括清扫车、清扫机器人等,适用于中型光伏电站。半自动清扫机器具有较高的工作效率和清扫效果,但需要人工操作和监控。
-
全自动清扫机器主要包括清扫无人机、智能清扫机器人等,适用于大型光伏电站。全自动清扫机器具有自动化程度高、清扫效果好、运维成本低等优点,但设备投入较高。
-
1)适应性:根据光伏电站的规模、地形、气候等特点,选择适应性强、可靠性高的清扫机器。
2)经济性:在确保清扫效果的前提下,综合考虑设备投入、运维成本等因素,选择经济性较好的清扫机器。
3)先进性:优先选择具有自动化、智能化功能的清扫机器,提高光伏电站的运维水平[4]。
根据该项目经过对以上3个因素的全面分析,选择全自动清扫机器对光伏板进行清扫,从项目的时间效果来看,清扫的效果非常明显,先进性和经济性都得到了全面的体现[5]。
该项目的光伏支架以平单轴为主,每一排平单轴配置3~4串光伏组件,长度在90~120 m之间。而项目中通常将南北方向若干排平单轴通过桥架相连,形成总长超过1 km的长排。这样会大幅度降低清洁成本,每排只需设置一台清扫机器人,如图1所示。

Figure 1. Connection diagram of horizontal single-axis photovoltaic brackets
这样虽然极大增加了单台机器人的覆盖距离,降低了清扫成本,但也带来了不少机器人与平单轴匹配性的问题。首先,平单轴是独立转动的,并且由一个上位机为若干排平单轴下达控制指令,每一个上位机控制的区域,称为一个支架方阵。一个光伏项目中支架分成若干方阵,即有若干控制区域。方阵与方阵之间,由于受不同上位机控制,且不同上位机存在不同的控制策略,常常出现较大的不一致性。比如某平单轴支架厂家的大风保护策略中,不同方阵的抗风角度是不同的,最大有10°的偏差。又如另一家平单轴支架厂家的大风保护策略中,不同方阵采用不同气象站的风速数据,导致某一方阵已经进入大风保护,而另一方阵还处在正常追日状态等。其次,即便是同一方阵内,由于上位机与下位机通讯的延迟,也会发生不同支架的转动角度不一致的情况。因此,在机器人清洗时相邻两排平单轴角度差超过10°,或在非清洗状态下相邻两排平单轴角度差超过90°等状态时常出现[6]。
传统的桥架采用基于内外套管的伸缩桥架,内套管与外套管在设计时保证一定的搭接长度,该搭接长度可以伸长或缩短,使其适应相邻平单轴角度差别引起的桥架长度变化。这种结构的最大问题是,由于搭接长度有限,当角度差超过某一限值时,内外套管会脱开,导致桥架结构断开,需要后续人工查找已经断开的桥架位置并恢复,产生了极大的运维成本,情况严重时更有可能损坏组件。此外,该设计下套管的搭接长度依赖于相邻支架间距,很多项目由于场地面积所限,支架间距过小,导致桥架在很小的角度差下便脱开,这更增加了后期运维的工作量[7]。
基于上述问题,本项目中我们设计了一种全新的不脱开桥架,该设计主要解决以下2个问题:
1)该桥架与平单轴采用柔性连接,随两排平单轴任意转动,在任意角度下对光伏组件及支架不产生破坏。
2)该桥架匹配相邻两排平单轴可能的最大角度误差,永不脱开。如平单轴的转动角度为±60°,则桥架可保证至少120°不断开。
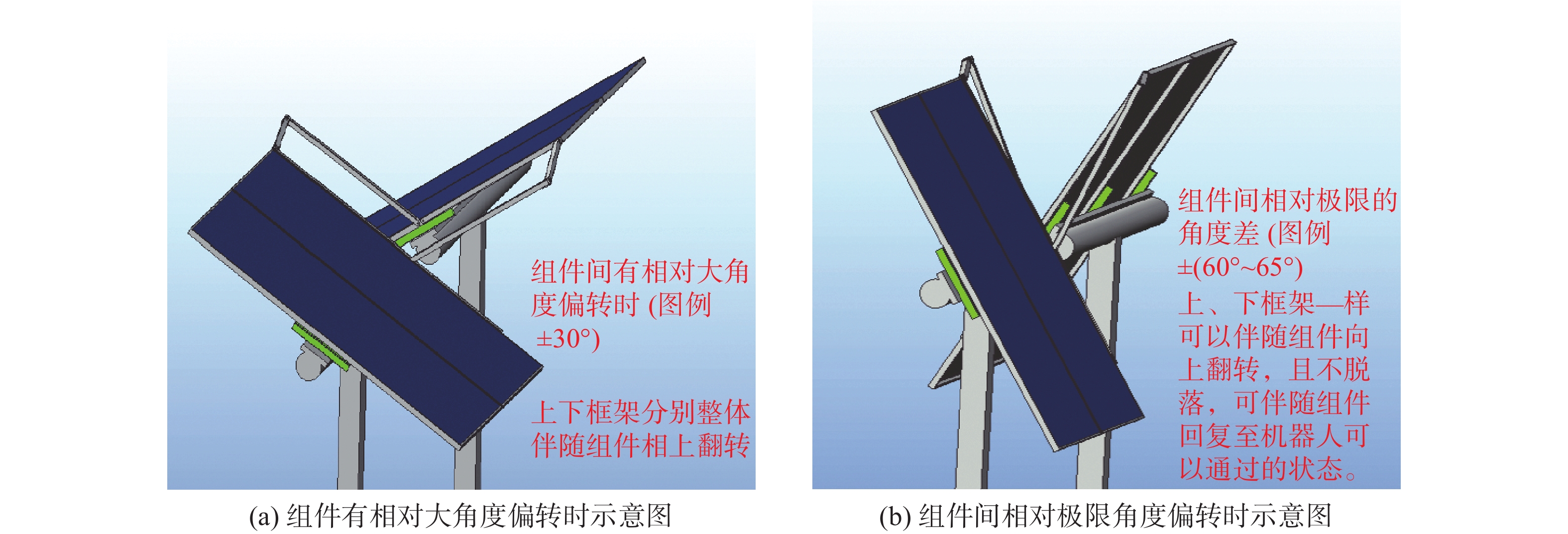
此外,相比于传统的伸缩杆结构,减少了桥架结构所需配置的两组光伏组件之间的中间间隙限制条件,能够更好地适应两组光伏组件之间的间隙需求,同时,当两组光伏组件角度差过大时,发生摆转的活动梁或发生摆转的活动梁能够对清扫机器人起到阻挡作用,不会造成因桥架脱落造成机器人脱落,降低了故障率[8]。其具体功能描述如下:
1)当桥架间相邻组件具有小角度偏差时,所述专利桥架结构可自行调整,并满足机器人可顺利运行的条件。
2)当桥架间相邻组件具有大角度偏差时,所述专利桥架结构可伴随组件一起进行简单的机械运动,但并不干预组件的运作;而当桥架间相邻组件回复至小角度时,所述专利桥架结构亦可自行地调整,并满足机器人可顺利运行的条件,此过程中不需要人工参与或调整。
3)当桥架间相邻组件具有大角度偏差时,可选装防机器人误通过装置,以避免发生机械故障。
该结构主要由上、下框架及桥架三部分组成。其中上、下框架均设有限位底座和转动梁,通过转动梁与限位底座的相对运动来补偿支架角度差带来的长度损失,使得其可在120°以上的角度差下实现柔性连接,不对支架及组件产生拉扯[9]。而桥架由传统的柔性套管式结构改为刚性U型槽结构,有效避免了桥架的断开[10]。与传统伸缩套管式桥架相比,该结构的另一优势是其不受相邻支架间距的影响,针对几乎任意常用间距,均可满足功能需求,如图2所示。
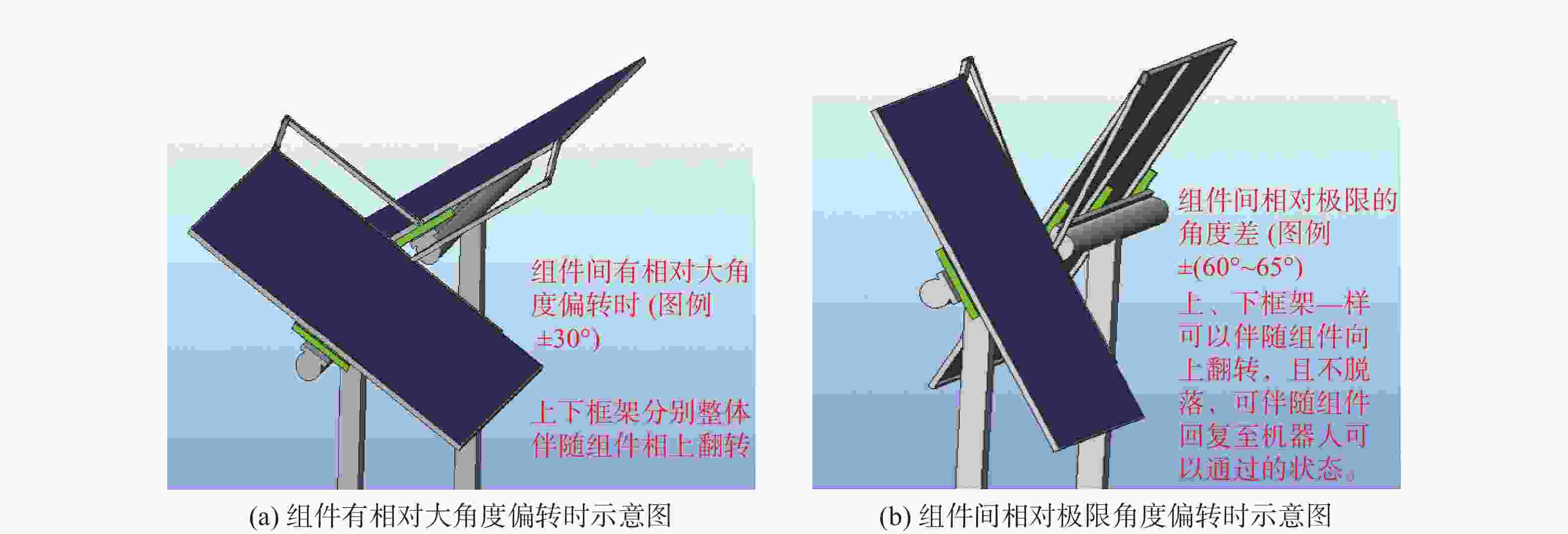
Figure 2. Diagram of the horizontal single-axis upper and lower frame flipping with components
-
本文针对沙特项目光伏清扫机器的选择和应用进行了研究,针对解决相邻两排平单轴角度差导致自动清扫机器人容易脱开问题,设计了全新的不脱开桥架系统,为全自动清扫机器人在大型沙漠地区光伏电站应用推广起到关键作用,提高了自动清扫机器人的应用效果,因此具有良好的前景。
Design and Practice of Automatic Cleaning Robot Matching for Horizontal Single-Axis Bracket Without Disconnecting from the Bridge in A Large Photovoltaic Power Plant in Saudi Arabia
doi: 10.16516/j.ceec.2024.S1.04
- Received Date: 2023-12-23
- Rev Recd Date: 2024-01-06
- Publish Date: 2024-06-30
-
Key words:
- desert areas /
- photovoltaic cleaning machines /
- photovoltaic automatic tracking brackets /
- horizontal single axis
Abstract:
| Citation: | YUAN Zhenbang, ZHANG Xi, LIU Jiachen. Design and practice of automatic cleaning robot matching for horizontal single-axis bracket without disconnecting from the bridge in a large photovoltaic power plant in Saudi Arabia [J]. Southern energy construction, 2024, 11(Suppl. 1): 19-22. DOI: 10.16516/j.ceec.2024.S1.04 doi: 10.16516/j.ceec.2024.S1.04

|

 DownLoad:
DownLoad: