

-
随着水下作业和海洋开发的日益发展,人类对水下探测的要求越来越高。在使用水下机器人或其它载体搭载探测设备对水下或海底目标物进行探测时,需要对水下机器人或其它载体进行精确的定位。
目前水下机器人的定位方法主要有超短基线定位、惯性导航定位(如AUV)、长基线定位、短基线定位,配合工作母船上的GPS共同实现机器人的定位工作[1]。长基线定位系统具有无需做大量的校准工作、在较大范围内可以达到较高的定位精度、作用距离较长、定位精度和水深无关等优点,但也存在系统构成复杂、声基线阵庞大、费用昂贵等制约因素;短基线定位系统安装时,需要在船底稳定固定各基元的位置,并准确量测个基元间的相互位置关系,难度较大,一般需要将船开至船坞准确量测、校准;超短基线定位系统(USBL)基阵尺寸小,安装使用方便,价格相对于长基线定位系统和短基线定位系统便宜,测距精度较高,结合GPS定位与罗经设备配合使用,可以大大减弱涌浪等因素对水下调查设备位置测量精度的影响。目前多采用超短基线定位系统对水下机器人或其它水下目标进行精确定位[2,3,4]。
HTML
-
超短基线在安装时需集成收发器,从而构成声学基阵,通过精确测定声学单元之间的相互位置从而组成声基阵坐标系。在安装时需精确测定船体坐标系与声基阵坐标系之间的相对关系,如:横摇角度、纵摇角度和水平旋转角度。超短基线通过测定声单元的相位差(确定垂直和水平角度)、传播时间,进而确定目标体的方位、距离[5,6]。以4个阵元组成的水听器基阵的超短基线定位系统为例,其阵列布置如图1所示。

Figure 1. Ultra short baseline array layout
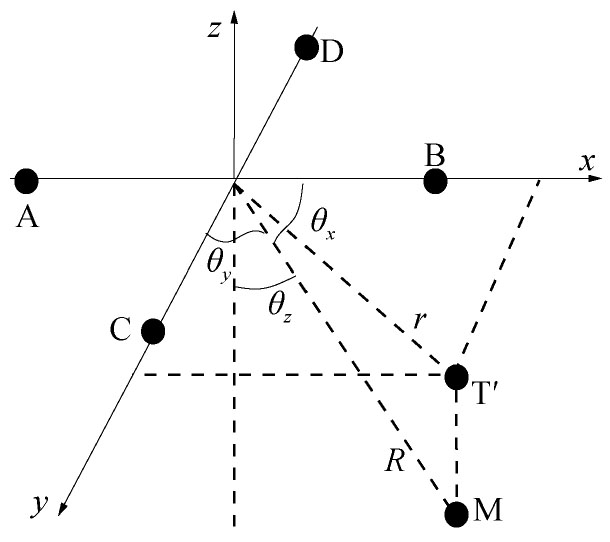
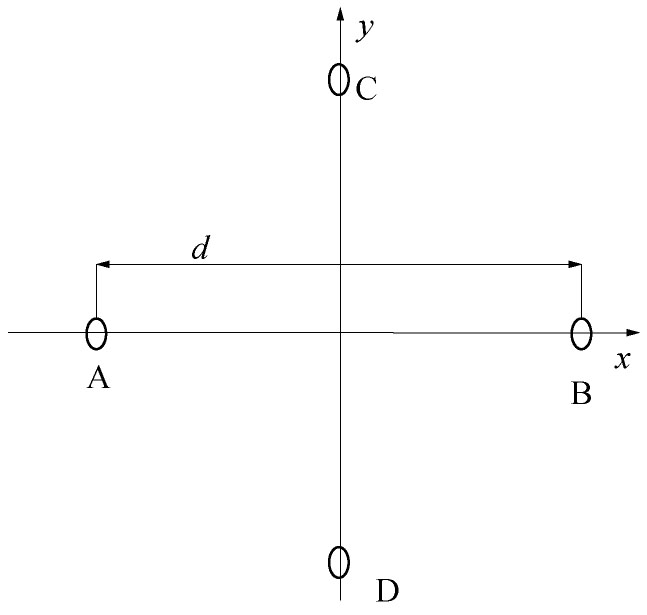
如图2所示,标号A、B、C、D代表基阵的4个阵元,x轴为A至B方向,y轴为D至C方向,两轴相交于阵元中心,过阵元中心垂直向上为z轴方向。M为目标,目标和阵元中心距离为L,阵元A、B间距和C、D间距相同,即阵元间距d。M在坐标系中的方向角为θx、θy、θz,可通过阵元传播时延确定[5,7,8,9]。

Figure 2. Schematic diagram of ultra short baseline positioning
待测目标物的各角度的方向余弦为:
((1)) ((2)) 方向角测定的基本公式:
((3)) 式中:φx为阵元间的相位差,由阵列测定,根据定位公式有:
((4)) 式中:θx、θy、θz满足基本条件:
为满足超短基线绝对定位的要求,超短基线定位系统需结合定位系统DGPS、电罗经、姿态补偿装置等共同使用。





-
影响超短基线定位系统定位误差的因素有很多,主要包括各种设备(包括辅助设备)的安装误差、各种设备(包括辅助设备)的测量误差、超短基线定位系统校准误差、定位数据处理过程中产生的误差等,为提高水下定位的精度,需要对各种引起误差的因素进行分析并采取处理措施削弱这些误差的影响。
-
超短基线定位系统中用到的主要设备包括母船DGPS、USBL基阵、声学应答器、USBL控制单元和电脑主机、电罗经、声速剖面仪等设备。其中母船DGPS采用大地坐标系,USBL基阵间采用基阵坐标系,两种坐标系的转换需要正确安装并量测DGPS和USBL基阵间的相对位置关系。但是量测相对位置关系时也难免存在测量误差,一般采取多次测量取均值的办法减小这个误差的影响。
USBL系统基阵通常安装于一个称为安装柱的圆柱顶端,作业时水听器伸到船舷下面,这时船舷下面部分的安装称为悬臂梁,在船舶航行或水流、波浪较大时,它在水阻力作用下会发生扰曲变形,导致水听器偏离其原始安装位置,产生偏差。一般的处理策略为控制船速在不超过3节并尽量在海况较好的工作条件下工作,选择在海流速度均匀时作业也可以有效减小安装住的扰曲变形影响。
-
1)母船DGPS定位误差:目前国内主流的水下探测工作母船的DGPS定位设备多采用差分全球定位系统(RBN/DGPS),其定位精度为1 m左右,DGPS定位是水面定位的基础,其定位精度很大程度的影响水下目标的绝对定位精度,因此母船GPS定位设备和定位方式的选取至关重要。使用全球星站差分GPS可以有效提高作业系统的定位精度,并不受作业区域的限制,星站差分GPS可以实现在全球范围内的较高精度的定位,比如NAVCOM公司生产的SF-3050可以实现全球范围内平面15 cm、高程30 cm的定位精度,较大程度上提高了水上水下勘测定位精度。
2)超短基线定位系统误差:超短基线定位系统是通过测定目标体的方位及距离来确定相对位置,因此其主要误差可以归结为测距误差及测向误差。市场上主流的超短基线设备的定位精度描述如表1所示[10,11]。
类型 生产厂家 型号 定位精度/% 距离精度/m 角度精度/(°) 最大量程/m 长距离高精度 Sim rad HiPAP350P 0.30 0.30 0.18 3 000 Sonardyne Fusion 0.27 0.20 0.20 7 000 IXSea Gaps 0.20 0.20 0.12 4 000 短距离低精度 Sim rad HPR410P 2.00 0.20 0.40 1 000 Sonardyne Scout+ 2.75 0.20 0.80 500 ORE Track Point3 0.50 0.30 — 500 AAE EasyTrak 2.50 0.10 0.80 1 000 Table 1.
Current market positioning accuracy of ultra short baseline 3)电子罗经误差:进行USBL水下定位时,需要采用电罗经来测定水听器的方向,而电罗经的方位角测量产生误差会引起相对应的定位误差;在定位时,船体受海浪、海流、海风的影响引起纵倾、横摇和艏摇等姿态的变化,也需要电子罗经提供姿态相应的改正参数,这些参数的测量也一定会产生误差。
处理策略:在母船上选择合适位置安装电子罗经,船上作业时避免对电罗经产生大的震动,减小外界干扰因素对罗经测量结果的影响;使用精度更高的测量级光纤罗经可以更精确的测定USBL基阵作业时的纵倾、横摇和艏摇等姿态,以削弱船体摇动对水下定位结果的影响。
4)声速测量误差的影响:USBL水下定位系统主要是通过测量水下声学基阵到应答器的距离及方位来计算应答器相对于水下声学基阵的位置。USBL测量距离的公式为:SR=V×(T-D)/2。其中,V为USBL在水中声纳传播的速度,而声速改正主要通过声速剖面仪进行声速测量,然后把测量的该测区的实际声速值输入到USBL主机中。声速测量的精度直接影响定位精度。
处理策略:选取测量精度较高的声速剖面仪进行声速测量;当温度变化较大(如早晨、中午、傍晚)或水深变化较大时,都需要重新测量声速剖面值,以提高声速剖面值的实效性,从而提高水下定位精度。
-
声学基阵安装误差是定位系统的主要误差源。安装超短基线定位时,需进行精确校准坐标轴平移(Δx,Δy,Δz)和坐标轴旋转(横摇角ω,纵倾角φ,航向偏角k),从而保证该六个参数误差达到最小,进而保证基阵中心与测量船重心的三坐标轴完全一致[12,13]。
目前市面上主流的超短基线产品都有自带的安装误差校准软件,通过校准来归算换能器基阵中心和测量船坐标系中心的位置偏差,并校准换能器的定向系统和测量船坐标系方向的角度偏差,从而减小超短基线系统的系统性误差,提高水下定位的精度。通过校准能够最大限度地优化声学定位系统,从而确保USBL工作的稳定性和高精度。
-
超短基线定位系统是通过测定目标体的方位及距离来确定相对位置,但为满足超短基线绝对定位的要求,获得目标体的地理平面坐标,超短基线定位系统需结合定位系统DGPS、电罗经、姿态补偿装置等共同使用。通常情况下,DGPS、姿态仪、罗经不能集成在超短基线应答器基阵内,因此总会存在一定的位置及姿态偏差,需要对这些偏差进行校正才可消除数据处理过程误差。而不同的软件及校正方法其获得的误差消除效果也是不同的。
此外,DGPS、姿态仪、罗经等设备数据更新率不一样,从而导致与超短基线数据不能同步,这种不同步会使数据计算出现一定的偏差,严重时会造成误读。非动力定位的船舶由于难以保持航向稳定,特别是在船转弯过程中,会产生较大的航向数据误差,甚至产生跳点(即异常点,指偏离测线较大或与实际不符的测量点),造成水下定位精度较差。
处理策略:在定位数据处理软件中设置跳点剔除功能,通过拟合或滤波等手段对跳点进行识别并剔除,可以削弱船舶转弯时的定位误差因素的影响;在水上水下作业前,将各传感器的系统时间统一设置为GMT时间并严格对时,同时对各传感器采样率设置为与定位数据相匹配的要求,从而提升水下定位数据的精度,满足现场作业水下定位的需求。
2.1 设备安装误差
2.2 设备测量误差
2.3 超短基线定位系统校准误差
2.4 数据处理过程中的误差
-
海南联系系统500 kV电缆是南方电网跨省区骨干网架,是海南电网与南方主网的唯一联络通道。该电缆深埋海底,自2009年建成每两年进行一次定期检测,通过水下机器人携带有源探测,并结合侧扫、多波束等高科技综合手段,对海缆路由的海底地形地貌、水下障碍物等情况进行探测、录像、声纳摄影,掌握海底电缆运行状况,为采取相应的保障措施提供科学依据。
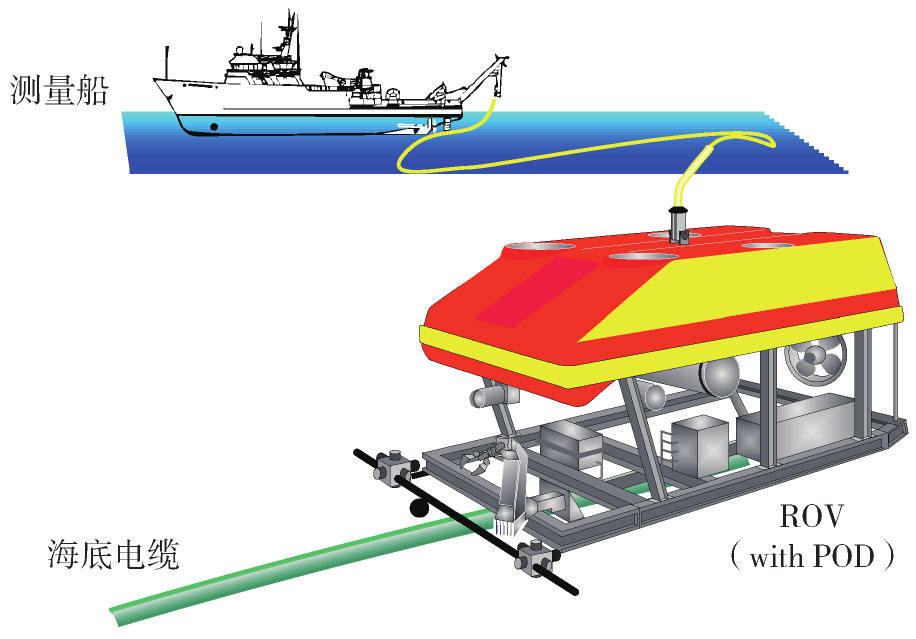
该项目于2011年、2013年及2016年进行了三次检测,检测的主要技术手段为:采用DP船+ROV+TSS系列+USBL定位设备进行数据采集,由于采用DP船+ROV,其海缆坐标由DP船上DGPS+水下ROV上USBL共同定位,通过DGPS对DP船进行位置定位,从而通过USBL对水下机器人TSS系列进行定位,当海缆已经成功定位,则ROV或者工作船所在的相对位置即为海缆坐标。图3为海缆检测方法示意图。

Figure 3. Schematic diagram of submarine detection method
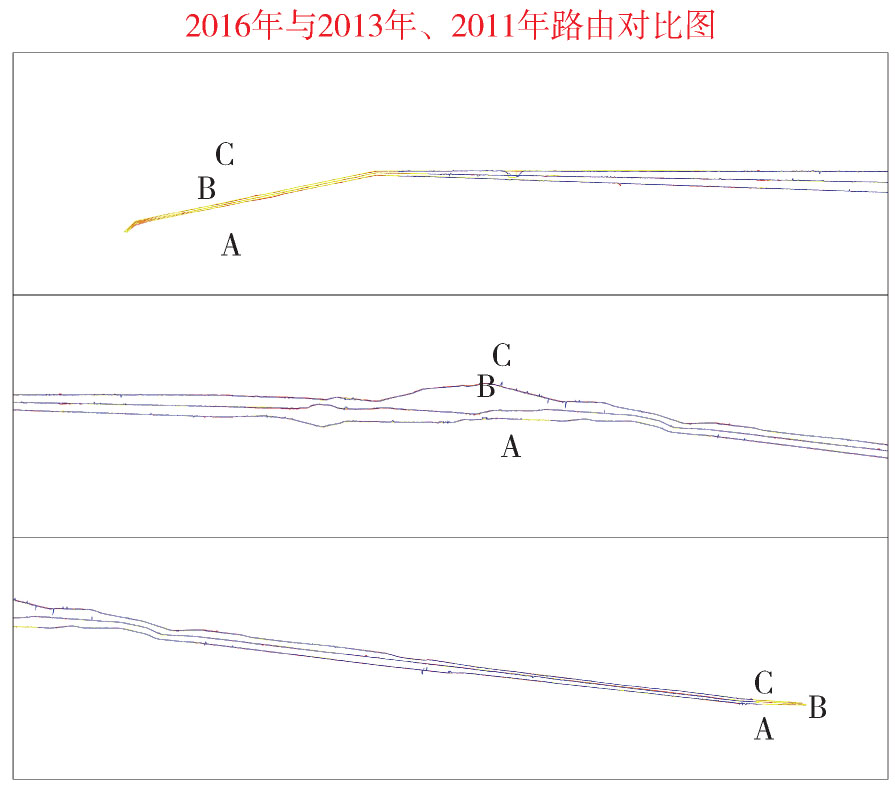
通过对2011年、2013年与2016年路由检测结果进行对比,如图4所示。对比方式为:将历次检测成果进行坐标系统统一并提取水平坐标数据,将每次检测的数据汇入CAD成图,寻找历次检测成果的吻合性并对比历次检测成果相隔最远距离的水平距离,进而进行分析。

Figure 4. Seabed route previous test contrast results chart
对比结论如下:三次检测所获路由整体趋势相同,整体路由坐标吻合较好;近岸段厉次路由检测平均差值<1 m;深水区检测路由局部区域差值较大,可达3 m,分析原因主要为路由段海床复杂多变,加之高低不平的抛石石坝,对检测结果影响较大,此外,琼州海峡流速大、海底地质含沙量大,故沙丘运移影响海缆路由位置。
-
超短基线定位是目前水下精确定位的常用手段。通过分析超短基线定位系统原理,论述了影响超短基线定位精度的各种因素及其处理策略。总体而言,为提高定位精度,应尽可能的选取高精度测量设备,减少仪器本身可能带来的误差;测量时,需正确安装USBL各设备及配套传感器,并准确量取各传感器的位置偏差;测量前必须实测声速剖面,并在测量时根据一天中温度的变化情况选择性的加测,以提高声速值的实效性;设备安装后需严格按照超短基线设备要求的校准程序,求取偏差参数,并输入到数据处理软件;选择海况较好时进行水下作业,测量时控制船速,减小海流对设备姿态的影响;数据处理时在软件中设置跳点剔除程序,各传感器采用统一的GMT时间系统并设置对应的采样率,提高各传感器数据间的数据匹配程度,从而提高定位精度。

 DownLoad:
DownLoad: