


-
随着全球清洁能源需求的快速增长,风力发电逐渐由陆上延生到风能资源更为丰富的海上,据统计海上风电的可开发量是陆地的3倍,海上风电已成为全世界可再生能源发展领域的新增长点。广东省海上风能资源丰富,依据《广东省海上风电发展规划(2017—2030年)》,到2020年底,开工建设海上风电装机容量12 GW以上,其中建成投产2 GW以上。到2030年底,建成投产海上风电装机容量约30 GW。整个广东省海上风电规划的总装机容量达66.85 GW,总投资12 033亿元。与发展规划不匹配的是,海上升压站平台国内规范体系并不完善,存在多种规范共存的局面。
海上升压站是连接海上风场和陆上电网的关键设备,起着汇集和送出风场电能及抬升输电电压、降低输电损耗的作用。通常,风场容量在100 MW,离岸10 km以上即需要设置海上升压站。目前专门的海上升压站标准主要为DNV船级社的《Offshore Substations》(DNVGL-ST-0145)[1],该标准对升压站结构安全等级,结构设计,电器设计,防火,防爆,疏散逃生,建造,在役检查以及运维等提出原则性要求,细节则主要借鉴相关海洋平台标准,例如《海上固定平台规划、设计和建造的推荐作法》(API RP-2A-WSD)[2],《石油和天然气工业 固定式海上钢结构》(ISO 19902:2007)[3],《Design of Steel Structures》(Norsok N-004)[4]以及挪威船级社相关规范。我国的海上升压站很多参照《风电场工程110 kV~220 kV海上升压变电站设计规范》(NB/T 31115—2017)[5]进行设计,该规范只提出了原则性要求,细节设计需参考《海上固定平台规划、设计和建造的推荐做法-荷载抗力系数设计法(增补1)》(SY/T 10009)[5]等规范的有关规定。由于海洋平台和海上升压站特点不同、国内与国外标准适用自性不同,给海上升压站设计、施工带来困扰,需深入研究。
HTML
-
海洋平台可分为:固定式平台、浮式平台。固定式平台由导管架、通用平台和上部功能模块(一个或者多个)组成。导管架支撑通用平台,通用平台支撑上部功能模块;导管架、通用平台、上部功能模块可分别由不同的单位设计、建造。根据上部功能模块的布置、总重量、安装的经济性,如果上部功能模块总重量不大,可以取消通用平台直接将功能模块支撑在导管架上。浮式平台由浮体和上部模块组成。海上升压站为固定式平台,故本文结合工程实际只考虑固定式平台。
-
不同的规范对荷载分类稍有不同,可以参考API RP 2A Section-5.1.2[2]和DNVGL-OS-C101 Sec-tion-2[6]。DNVGL-OS-C101[6] Section-2分类如下:
1)永久荷载(G):结构自重、设备和压载重量、外部和内部静水压力、上述三类相关的基础反力。
2)活荷载(Q):操作、安装使用中可能出现的大小、位置、方向不确定的荷载。
3)环境荷载(E):操作、安装使用中可能出现的大小、位置、方向不确定的周期性荷载,包括风、浪、流、潮、冰、雪、海生物、地震。
4)偶然荷载(A):非正常操作、导致失效的荷载,参考DNVGL-OS-A101[7],常见的荷载有:物体跌落、船舶碰撞、爆炸、热荷载等。
5)变形荷载(D):温度荷载、建造变形、基础沉降等。
6)疲劳荷载,来源有:浪、风、流、机械加载和卸载。
1.1 海洋平台分类
1.2 荷载分类
-
根据固定式平台建造方法的不同,其设计工况也不同,如表1所示。
基本工况 导管架 通用平台 上部模块 操作工况(包括正常、极端操作工况) √ √ √ 称重 — √ √ 装船工况 √ √ √ 海运 √ √ √ 下水和翻转(只针对导管架) √① — — 吊装 √① √ √ 地震 √ √ √ 防爆 — √ √ 疲劳 √ √② √② 倒塌分析 √ — — 船舶碰撞 √ — — 物体跌落分析 — √③ √③ Table 1.
Load cases of fixed platform -
目前载荷抗力系数设计法(LRFD)、许用应力法(ASD,也叫工作应力法WSD)同时应用于海洋工程。WSD法是比较成熟的确定性方法,而LRFD法是简化的概率法。WSD法使用简便,但存在明显不足:假定各类荷载和结构抗力是确定值,安全校核时要求荷载效用之和必须小于结构容许应力,本质上WSD法只有一个综合的安全系数。但实际上荷载和抗力都是随机变量,符合一定分布规律,要求结构可以抵抗所有可能出现的极端荷载,经济上难以承受,也无必要。事故荷载的随性性高且破坏性强,使用上述原则尤其不合适。LRFD虽然与WSD的设计原则类似,也要求荷载效用之和小于结构抗力,但荷载特征值不是根据经验取定,而是根据荷载的统计分布,按照一定安全标准取其下限分位值。另外,LRFD分别设立抗力系数和荷载系数,根据各类荷载的变异大小,取不同系数,从而使结构面对不同荷载时具备统一的安全水平。目前,挪威船级社的DNV规范倾向于使用LRFD法,而美国石油学会的API规范推崇WSD法,但1992年以后也推出了基于LRFD法的规范,当前两个版本并行使用,我国能标系统推荐采用LRFD方法。
美国、欧洲、挪威、中国海洋工程设计方法分别如表2所示。
国家 规范 LRFD ASD(WSD) 美国 API① — √ AISC, ASCE② √ √ ABS③ — √ 欧洲 EN 199X④ √ — ISO 1990X ⑤ √ — 各个船级社⑥ √ √ 挪威 Norsok N-XXX ⑦ √ — DNVGL⑧ √ √ 中国 石油天然气:API、AISC、CCS — √ 风电:GB √ — Table 2.
Design method of marine engineering steel structure 由于海洋工程的特殊性,有些工况只有ASD设计方法,比如桩土相互作用(PSI)、疲劳分析,美国规范有一套完整的ASD设计方法,采用美国规范ASD方法,只需要一套模型、载荷组合,故本文对美国规范将按照ASD方法进行比较。
中国的固定式平台,在海上油气行业使用美国API和AISC的ASD方法,风电行业采用国标的规范(LRFD)方法。
2.1 固定式平台设计工况
2.2 海洋平台设计方法
-
在对设计方法对比前,需对每个设计工况的输入、输出有所了解。工况组合及荷载系数、阻抗系数(许用应力比)是重要的控制参数。
-
操作工况分为正常操作工况和极端操作工况,属于控制工况。
-
美标ASD操作工况详细可以参考ASCE/SEI 7-05 Section-2.4.1。在操作工况下许用应力比不提高。
在正常操作工况下应满足式(1)①:
((1)) 在极端工况下应满足式(2):
((2)) 式中:①指一般45°方向为一个工况,共8个工况,进行强度、变形校核;②指正常操作工况取10年一遇风速、极端工况可取100年一遇风速(API RP 2A-WSD 1.3.2) [2];③指和风载类似,分为操作工况、极端工况;其他荷载如冰载等根据实际情况选用(API RP 2A-WSD 1.3.3~1.3.5) [2]。
-
欧洲的LRFD操作工况推荐参考ISO 1990X。
-
载荷组合如下(ISO 19902:2007 9.10.3.2) [3]:
((3)) 载荷系数如表3(ISO 19902: 2007 Table 9.10.1)[3]所示。
Design situation Partial action factors a γf,G1 γf,G2 γf,Q1 γf,Q2 γf,Eo γf,Ee Permanent and variable actions only 1.3 1.3 1.5 1.5 0.0 0.0 Operating situation with corresponding wind, wave, and/or current conditions b 1.3 1.3 1.5 1.5 0.9 γf,E 0.0 Extreme conditions when the action effect due to permanent and variable actions are additive c 1.1 1.1 1.1 0.0 0.0 γf,E Extreme conditions when the action effects due to permanent and variable actions oppose d 0.9 0.9 0.8 0.0 0.0 γf,E a A value of 0 for a partial action factor means that the action is not applicable to the design situation. b For this, check that G2, Q1 and Q2 are the maximum values for each mode of operation. c For this, check that G1, G2 and Q1 include those parts of each mode of operation that can reasonably be present during extreme conditions. d For this, check that G2 and Q1 exclude any parts associated with the mode of operation considered that cannot be ensured of being present during extreme conditions. Table 3.
Partial action factors for in place situations and exposure level L1 -
根据ISO 19902:2007 7.2-f[3]规定,使用要求由业主规定;设计时若无规定,可以按照上述ULS设计组合,将载荷系数取为1。
1)挪威LRFD操作工况
承载能力极限(ULS)载荷组合如下(DNVGL-OS -C101(2017) 4.2.4) [6]:
((4)) 式中:Ski:为载荷特征值;γfi:为载荷系数,取值如表4 (DNVGL-OS-C101 4.4.1 Table-2)所示。
Combination Of design loads Load categories G Q E D a) 1.3 1.3 0.7 1.0 b) 1.0 1.0 1.3 1.0 Load categories are: G = permanent load Q = variable functional load E = environmental load D = deformation load For description of load categories see Sec.2. Table 4.
Load factor for ULS of DNVGL 2)中国风电行业LRFD方法
如前文所述,风电项目采用国标LRFD方法,但是需要注意的是:美国API 1992年加入LRFD方法,使用后发现问题现在已经取消LRFD方法。鉴于之前中国海洋工程与国标所属陆地工程几乎没有技术交流,国标的制定未考虑海洋工程的特殊性,故使用国标时,安全性与经济性有待进一步论证。
-
一般参考规范(GL 0013/ND)[8]的指导性方法,实际项目中各个公司可能有自己的规定,应依据项目规定进行分析,一般为非控制工况。
根据平台尺度、重量的不同,装船方法及相应的分析原理主要有:
-
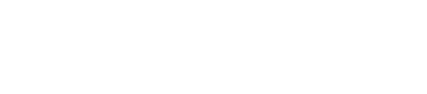
常应用于导管架的装船:用钢筋混凝土支墩搭建两条完整的轨道,上部找平并铺钢板,与运输船上的滑道齐平,使导管架的两条桩腿可以在轨道上缓慢滑动上船,如图1所示。

Figure 1. Loadout
装船过程中,须控制运输船上滑道与陆地滑道的高差,尤其是码头承载力不够强的情况下:运输船升的过高、降的过低,码头与导管架节点接触的地方,会产生过大的载荷,可能破坏码头主梁、桩帽。一般考虑±25 mm高差。
主要荷载为自重(G)、变形荷载(D)。因导管架很重,风载相对较小可以忽略。其荷载组合表述为:
((5)) 实际项目中,可能有多种计算情况,比如:
1)导管架每层标高处的节点同时取+25 mm或-25 mm,其他标高处节点保持不变,且所有节点支撑需改为只受压,主要用于考虑场地不平整、校核导管架的强度。
2)落在船上的节点全部取+25 mm或-25 mm,码头上的节点保持不变,所有节点支撑改为只受压,进行有限元接触分析。适用于码头承载力有限或超重的情况,主要用于校核码头。
-
模块由滑车支撑,在轨道上滑动上船。因其轨道、滑车高度不能调节,故可能出现支撑点不在同一个水平面内的情况,及基础的升沉:船厂应提交建造质量控制措施,给出最大的升沉量D(exp:±25 mm),设计方将其考虑为荷载施加于结构进行强度分析。一般应考虑如下工况组合:
((6)) 式中:(1)对于每一个支撑点分别考虑±Di(±25 mm),且与8个方向风载组合(有时忽略风载);(2)刹车制动力需考虑,其大小根据滑车参数决定。
-
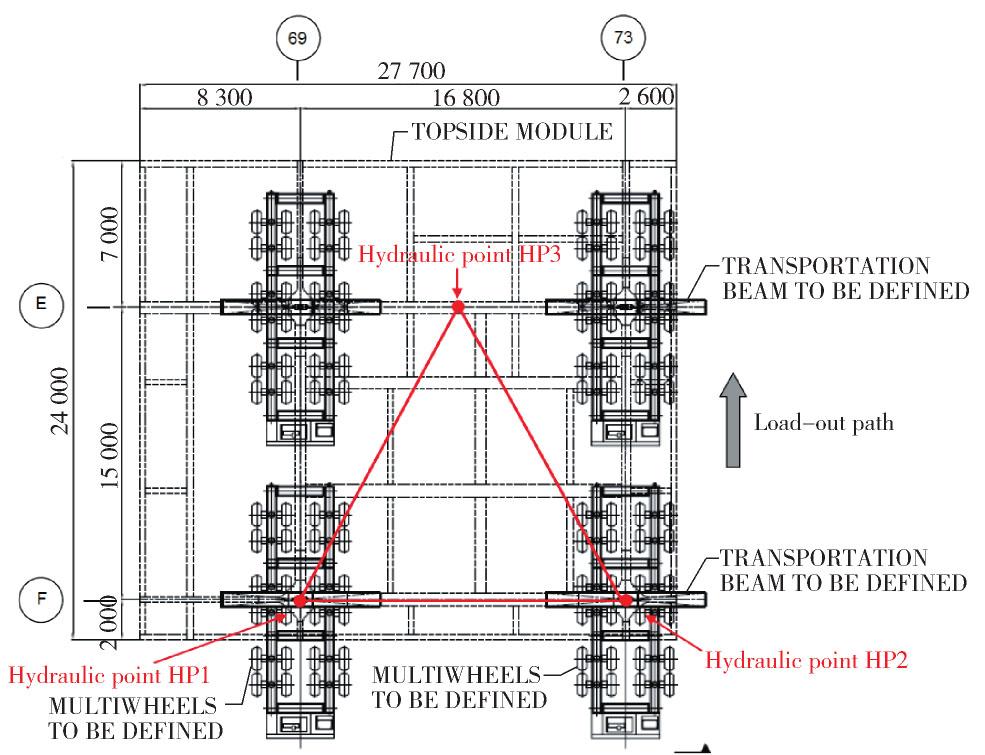
SPMT(自行式模块化拖车)可以自动调节每组轮胎的升降(±300 mm),整个过程保持水平,每组轮胎受力均匀;不同的SPMT单元可以通过液压连接为一组,连接后每组轮胎受力相等,控制模块重心位置,如图2所示。特别适合码头承载能力差的情况。

Figure 2. Shipment using SPMT
分析分如下两种情况:
1)4组支撑(GL 0013/ND 6.1.4)[8]:模块受力状况类似于滑车,分析参考滑车装船方法。这也是最终的操作状态。
2)3组支撑(GL 0013/ND 6.1.5)[8]:其中两组SPMT通过液压连接,如图2所示。连接后的SPMT胎压相等;模块的重心位置应落于3组SPMT中线连线的三角形内,此方法主要是为了分析装船过程的抗倾覆能力。因为相连的两组SPMT支撑反力相等,实际上等同于改变了结构支撑点的竖向位置,可以按照API RP 2A ASD方法校核模块结构。一般工况组合如下:
((7)) 式中:Fi为模块平衡后相应支撑点的支反力。其求解步骤如下:
1)结构支撑点的边界条件为简支,算出每个工况的每个支撑点的反力。
2)对每个相应的工况,算出相连的SPMT的总反力。
3)对每个相应的工况,创建一个与其对应的新工况,根据上一步的总反力,在相应的支撑点上施加一对大小相等的反力,且总反力大小保持不变。
4)删除原来的边界条件,为保持计算稳定需要施加最少的弱弹簧边界。
5)计算新创建的工况,求出总的不平衡弹簧反力:若其值较小,计算完成;若其值较大,应找出前面步骤出错的地方,直到不平衡力满足要求为止。
上述3中装船方法各有优缺点,选用时可参考如表5所示。
方法 应用范围 优/缺点 特点 整体式滑道 一般用于深水导管架、重型模块等 优点 滑道水平度容易保证,滑道高度可调; 装船件传递到码头的荷载比较均匀; 滑道支墩可重复使用。 缺点 对运输船与码头相对高差要求较高,故应严格控制压载水的排放,过程缓慢; 滑道本身给码头增加了很多额外荷载; 运输船需使用牵引装置及相应配套设备,增加额外成本、工时; 需要较多人工、设备铺设滑道。 滑车(滑靴) 适用所有模块 优点 承载能力强,适用性广,可根据需要使用多条轨道。 缺点 装船件底部水平度受场地影响大,结构可能承受较大内力,故在结构设计中应考虑场地不平整因素; 应严格控制船舶压载水的排放。 SPMT 模块化设计 优点 成本低、适应能力强:SPMT可运输至任何地方,码头受力均匀,甚至可以在驳船之间进行转运,码头承载能力不好时优先考虑; 可根据需要铺设任意条数、任意长度的SPMT工作组; 对场地水平度要求不敏感,±300 mm自动调节,故装船件底部水平度易于保证,对船舶排水要求不高。 缺点 承载能力受限(一般7~10 t/m2),不适用于重型模块。 Table 5.
Summary of loadout methods 各国装船设计标准分别如表6所示。
Table 6.
Design code of loadout 推荐采用GL-0013/ND方法:其被广泛认可,除边界条件不同外,设计方法类似于操作工况。
-
各国规范海运的计算原理都是相同的,广泛采用GL 0030/ND[10],分析时需考虑如下荷载:(1)自重G;(2)船舶摇动。包括6个状态:横摇(Roll)、纵摇(Pitch)、艏摇(Yaw)、横荡(Sway)、升沉(Heave)、纵荡(Surge)。6种状态是相互关联的,实际计算中可以简化为3个方向的加速度:水平横向(αT)、水平纵向(αL)、垂向(αH),三个方向加速度分别包含了相应方向的动力加速度分量、重力加速度分量。其计算取值见GL 0030/ND 7.9.1[10]。典型取值如下:
1)Roll:20°,TR=10 s。
2)Pitch:12.5°,TP=10 s。
3)Heave:0.2 g。
4)αT=±(4π2θ/
5)αp=±(4π2θ/
6)H=±0.2 g。
-
一般45°方向为一个工况,共8个方向。少数业主同意不考虑此荷载,但一般此荷载与加速度荷载同向叠加。
-
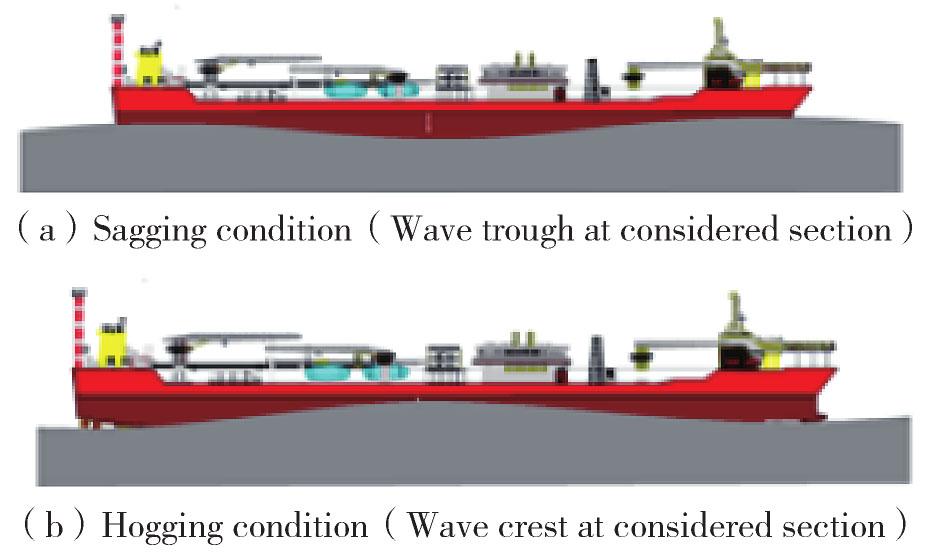
DNVGL-OS-C102 3.8.1[11]有如下明确规定,应分别进行中垂状态(Sagging condition)和中拱状态(Hogging condition)的受力分析,如图3所示。

Figure 3. Hull deformation of transportation
实际计算中,会有如下情况:一、模块和船体在一个计算模型,此时计算模型实际上会自动协调变形关系,即自动考虑,但是此情况较少。二、模块、运输船强度分别校核:模块的支反力提供给运输船所有方,双方分别校核。此时,双方都没有考虑,计算的结果实际是不安全的:模块支座处的水平位移、竖向位移载荷没有参与计算。
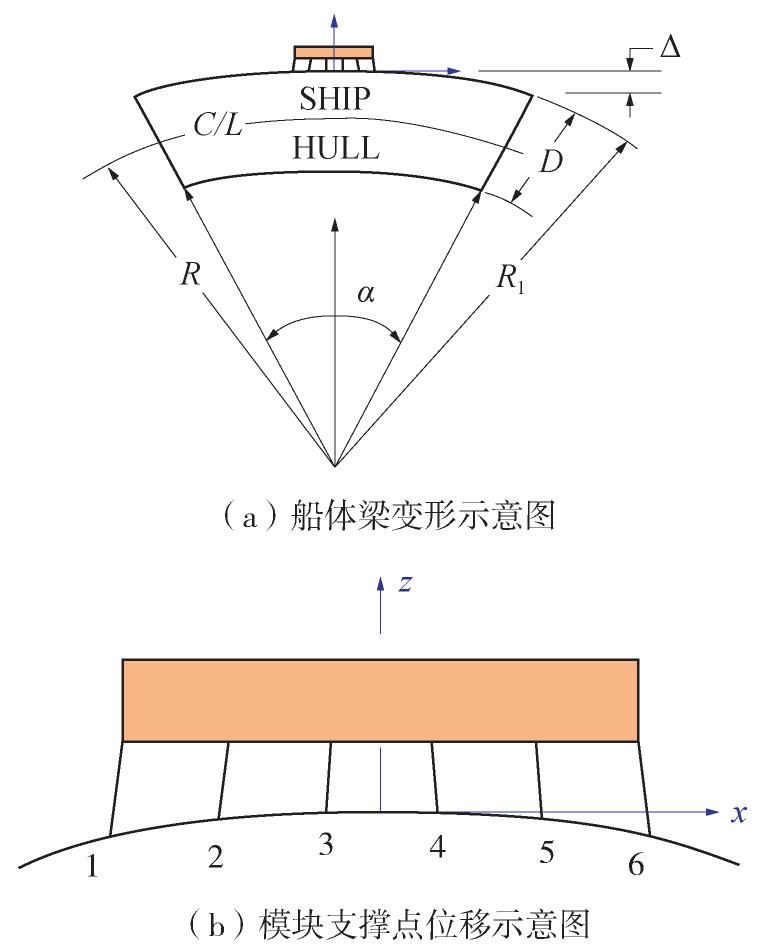
Hog、Sag变形半径R的计算如图4所示。

Figure 4. Deformation calculation of hull
若船体参数已知,则根据经典力学有:
((8)) 式中:船体总纵强度为M(弯矩);船中的惯性矩为I。
2)船体参数未知
一般要求施加1/1 000的变形需施加在模块支撑处。其原因:船体甲板屈服强度Fy=355 MPa按照ASD设计方法,其抗拉强度为0.6Fy,则根据应力σ、应变ε、E的关系:0.6Fy=E·ε,四舍五入可得:ε=1/1 000。运输船形心近似在船中,可得公式(9):
((9)) 式中:DShip为船体型深。
Hog、Sag变形半径R计算过程如下:
由Θ=L/R,进一步可得:
((10)) 由R的表达式可知:船的型深越大,R越大,则支座水平位移越大;船的型深越小,R越小,则支座的竖向位移越大。
-
按照ASD方法得到如下工况:
((11)) ((12)) 式中:(1)i表示45°方向一个工况;(2)αTi、αLi、风载Wi在45°、135°、225°、315°方向应根据基本荷载矢量叠加得到。
目前海运分析中,船体变形是各个业主要求差别较大的因素,如表7所示。
Table 7.
Design comparison for sea transportation analysis 因船体变形必然发生,故对海运分析建议如下:
1)设计上:(1)考虑船体变形:根据运输船参数(设计弯矩、剖面模数、船中型心)计算船体变形,原理同本文3.3(3);(2)对失效构件,考虑节点处的实际翼缘板/腹板,或将甲板作为有效翼缘板,确保构件计算通过。
2)构造上:海运加固件与船体连接处采用连接板,与船体的接缝沿船体横向,可以消除水平变形。
3)对于采用2×2单跨设计的模块结构,船体竖向变形可以忽略不计,只考虑水平变形。
-
吊装只考虑自重,并乘以规范规定的系数。
-
F=G·DAF,其中DAF为动力放大系数。
-
根据API-RP-2A WSD 2.4.2.c[2],DAF取值如下:(1)开阔海域:DAF=2.0校核和吊点直接相连的杆件、吊耳;DAF=1.35校核其他杆件;(2)遮蔽海域:DAF=1.5&1.15。注:吊耳计算时应考虑水平荷载(API-RP-2A WSD 2.4.2a)[2]。
-
根据API-RP-2A WSD 2.4.2.f[2]:(1)吊绳:G·SF,SF>=4.0;(2)卸扣:G·SF,SF>=3.0。
-
根据ISO 19902:2007 8.3.6[3]:
((13)) -
根据ISO 19902:2007 8.3.8[3]:(1)吊绳:SF>=4.0;(2)卸扣:SF>=3.0。
-
1)强度计算公式如下:
((14)) 式中:FCOG为重心不确定性参数(GL 0027-ND 5.2) [12];FTILT为单吊机吊装倾斜系数(GL 0027-ND 5.3);Fyaw为双钩吊装系数(GL 0027-ND 5.4);DAF为动力放大系数(GL 0027-ND 5.5);SKL为索具制造误差系数(GL 0027-ND 5.6);Fcon为构件重要性系数(GL 0027-ND 11.4.1);一般算出来的总系数比API的系数稍微大一些。
2)索具校核公式如下:
((15)) 式中:γsf为安全系数,计算见GL 0027-ND 7.3,其值与吊绳、卸扣的相对尺寸有关;一般计算的安全系数比API的系数稍微大一些,详细对比如表8所示。
设计参数 美国/中国(ASD) 挪威(LRFD) 欧洲(LRFD) 校核规范 AISCAPI Norsok Nxxx ISO 1990x、EN 199x 参数取值 API GL 0027-ND ISO 1990x 荷载系数 γ=1.0 γ=1.3 γf,GT =1.3 γ f,QT=1.3 γ f,T=1.0 重心不确定系数 — FCOG=1.03~1.10 重量控制须满足:ISO 19901-5 单吊钩倾斜系数 — FTILT=1.03(考虑2°) — 双吊钩倾斜系数 — F Yaw=1.05~1.09(考虑3°~5°) γ f,dl=1.10 γf,dl=1.00 (单钩吊装) 动力放大系数 — DAF=1.03~1.25 kDAF=1.10~1.30 索具制造误差系数 — SKL=1.10~1.25 SKL=1.15~1.25 结构重要系数 — S=1.30(吊点) γ f,lf=1.25 S=1.15(与吊点相连) (开阔海域:吊点及与吊点相连构件) S=1.10 γf,lf=1.15(遮蔽海域) (其他构件) γf,lf=1.0(其他构件) 总系数/总载荷 吊点 2.0(开阔海域);1.5(遮蔽海域) γ×FCOG×FTILT×FYaw×DAF× SKL×S k DAF×γf,dl×γf,lf×(γf,GT×GT+γf,QT×QT+γf,T×T) 与吊点相连 2.0(开阔海域);1.5(遮蔽海域) γ×FCOG×FTILT×FYaw×DAF× SKL×S kDAF×γf,dl×γf,lf×(γf,GT×GT+γf,QT×QT+γf,T×T) 其他构件 1.35(开阔海域);1.15(遮蔽海域) γ×FCOG× FTILT×FYaw×DAF×SKL×S kDAF×γf,dl× γf,lf×(γf,GT×GT+γf,QT× QT+γf,T×T) Table 8.
Summary of hoisting design of marine engineering structures in various countries API规范简单实用,应用广泛,但不够细化,例如钢丝绳与纤维绳的影响就不一样;DNVGL规范全面考虑了环境荷载、设备的影响,需要计算每个相关系数并连乘,最后得到总的安全系数。对于掌握吊装分析的工程师,因尽量采用DNVGL的方法。
-
因为疲劳分析用的载荷是特征值,故各国规范比较类似;但是对于采用LRFD设计的规范,需要重新建立一套载荷进行疲劳。
固定式平台,只有导管架需要考虑疲劳分析(谱疲劳分析)。对浮式结构,需在上部模块和下部支撑结构的界面处验算疲劳(简化疲劳分析、确定性疲劳分析),DNVGL、ABS规定参考:DNVGL-OS-C102 7.1.4[11]、NO-30-7 2.3.4[13]和ABS Floating Production Installation Part 5A 1.5[14]。
3.1 操作工况
3.1.1 美国ASD操作工况


3.1.2 欧洲LRFD操作工况
3.1.2.1 承载能力极限(ULS)

3.1.2.2 正常使用极限(SLS)

3.2 装船工况
3.2.1 整体式滑道

3.2.2 滑车(滑靴)

3.2.3 SPMT装船

3.3 海运分析
3.3.1 荷载
3.3.2 风荷载
3.3.3 运输船的变形



3.3.4 工况组合


3.4 吊装分析
3.4.1 美国、中国ASD方法
3.4.1.1 结构校核
3.4.1.2 索具校核
3.4.2 欧洲LRFD方法
3.4.2.1 结构校核

3.4.2.2 索具校核
3.4.3 挪威LRFD方法


3.5 疲劳分析
-
我国对海洋工程的抗震设防作了一定的规定,《海上平台厂址地质勘查规范》(GB 17503—1998)[15]要求给出海上平台场址50年超越概率10%和0.5%的地震烈度和基岩地震动水平峰值加速度。设计地震动参数由土层地震反应分析得出,包括平台场址地表与地下不同深度的地震动峰值加速度和相关反应谱。最后根据海上平台抗震设计要求,取50年超越概率10%和0.5%分别作为海上平台的强度设计和变形设计的概率水准。其后,《海上平台厂址地质勘查规范》(GB/T 17503—2009) [16]中要求给出海上平台场址50年内超越概率63%、10%、2%的地震动水平向加速度及重现期200年、1 000年、5 000年的基岩地震动水平向峰值加速度。分析计算出海上平台场址不同概率水准、不同深度的场址地震动参数,其中包括海上平台场址海底面以下所需深度的地震动水平向峰值加速度。但此修订版并未给出强度设计和变形设计对应的概率水准。
美国API RP2A[2]要求平台结构考虑两水准的地震风险。
-
为确保结构的强度,在强度水准地震下(strength level earthquake),结构不发生明显的损伤,基本保持弹性(elastic design)。考虑地震的偶然性和不可预测性,强度分析时所考虑的地震重现期一般大于波浪的重现期,对于美国的南加州地区,一般取200年一遇的地震用于强度校核。
((15)) 式中:D1是结构的自重;D2是有设备和其它物体的重量施加于平台的荷载;L1包括可消耗的供应品以及管线和储罐中液体的重量。
-
目的是保证在罕遇地震作用下避免平台倒塌,用于韧性分析,一般取1 000年一遇。对于强度水平的地面设计水平加速度小于0.05 g的地区,可以不进行地震分析,因为这类地区的平台控制荷载不是地震荷载,而是设计环节荷载。
海上风力发电机的使用寿命一般为25年,海上风电场的运行年限一般也为25年。“多遇”、“设防”或“罕遇”地震应该是相对工程或结构的使用寿命期而言的。若重现期是使用寿命的N倍,如表9所示,当N一定时,在使用寿命内发生复发周期为N·TL的地震的超越概率与使用寿命期的年限基本上无关,接近一个常数。不论使用寿命多长,与超越概率63%、10%、2%的地震对应的重现期恰为使用寿命的1倍、10倍和50倍。
N/倍 使用寿命期TL/年 30 50 100 1 0.638 3 0.635 8 0.634 0 10 0.095 3 0.095 3 0.095 2 50 0.019 8 0.019 8 0.019 8 Table 9.
The relationship between the exceeding probability and the renewal period 美国石油平台的使用寿命一般为20年,强度水准采用200年重现期的地震动,其超越概率接近10%,也就是在“中震”的作用下基本保持弹性。韧性水准采用1 000年重现期地震,其超越概率接近2%,即在“大震”的作用下保证结构不倒塌。也就是说,从抗震性能来说,美国关于石油平台两水准设计的实质其实是“中震”不坏,“大震”不倒。
海上升压站应选用适宜的抗震性能目标。抗震性能目标应综合考虑建筑抗震设防类别、设防烈度、场地条件、结构的特殊性、建造费用、震后损失和修复难易程度综合确定。《风电场工程110 kV~ 220 kV海上升压变电站设计规范》(GB/T 31115—2017)[5]规定,海上升压站设计使用年限应为50年。若取50年超越概率10%和0.5%分别作为海上平台的强度设计和变形设计的概率水准。此性能目标相当于比“中震不坏”提出了更加严格的要求,甚至在某些情况下达到了海上升压站结构的“大震”不坏,要求会过于保守。考虑平台的使用期限一般是25年,本文建议取25年超越概率10%作为强度设计的地震水准,以“中震基本弹性、大震不倒”为海上升压站的抗震性能目标。以25年超越概率为10%的地震动水平(L-1)进行弹性设计或者不屈服设计,具体方式如表10所示:
设计参数 L-1级弹性设计 L-1级不屈服设计 水平地震影响系数最大值 L-1级地面运动 L-1级地面运动 时程分析地震加速度时程曲线最大值 L-1级地面运动 L-1级地面运动 内力调整系数 1.0(抗震等级四级) 1.0(抗震等级四级) 荷载分项系数 按抗规GB 50011—2010要求 1.0 承载力抗震调整系数 按抗规GB 50011—2010要求 1.0 材料强度取值 设计强度 材料标准值(提高了承载力) Table 10.
Elastic design of L-1-grade earthquake and unyielding design 相对于L-1弹性设计,L-1不屈服设计取消了荷载组合的影响,忽略了不同结构类型的安全度影响,并且采用材料强度标准值。若以小震设计为基准,将Smp/Ss和Sme/Ss分别定义为L-1不屈服性能指标系数和L-1弹性性能指标系数,则有:
((16)) ((17)) 式中:Smp为L-1不屈服性能目标对应的地震作用组合效应;Sme为L-1弹性性能目标对应的地震作用组合效应;Ss为小震作用的组合效应;SG为重力荷载代表值的效应;SEs为弹性反应谱小震作用标准值的效应;γE、γG、γRE、γM分别为地震作用分项系数、重力荷载分项系数、构件截面抗震承载力调整系数、材料标准强度与设计强度的比值;η为按照抗震规范考虑抗震等级、强柱弱梁等级的内力调整系数。
总体上看,L-1性能指标系数随SEs/SG的增大而增大,L-1弹性性能目标高于L-1不屈服性能目标。当地震作用相对自重较小时,小震性能目标有可能比L-1性能目标更加偏于保守。SEs/SG>5时,相对于小震弹性目标,L-1弹性性能目标提高幅度较大。由于海上升压站平台的设备自重较大,SEs/SG相对于普通民用建筑较小,不同构件间SEs/SG差别较大,为了合理提高海上升压站平台的抗震性能,按L-1进行弹性设计较为合适。
除本文推荐的“中震基本弹性、大震不倒”外,也可在满足规范最低要求的前提下,依据业主需要采用基于性能的抗震设计方法[17],采取更为灵活的抗震设计策略。
4.1 强度分析

4.2 韧性或称为延性分析


-
根据不同工况设计输入、输出,可以得到如下汇总,如表11所示。
国家/地区 设计方法 优 势 美国 ASD + LRFD 设计系统完整;可以全部采用ASD方法,只需要一套模型、载荷组合。 欧洲 LRFD 设计系统完整;对于特殊工况需要重新建立一套模型、载荷组合,比如疲劳。 挪威 ASD + LRFD 设计系统完整;对于特殊工况需要重新建立一套模型、载荷组合,比如疲劳。 中国 ASD + LRFD 设计系统不完整,前沿工程设计仍需参考国外规范;一些设计方法虽然采用国标的规范,但是系数的取舍缺乏完整的规范体系支持,比如吊装、海运;对于特殊工况需要重新建立一套模型、载荷组合,比如疲劳。 Table 11.
Summary of design method
-
一个项目可能同时遇到以下标准(优先级由高至低):国家法定标准、船级社规范、项目规范、公司标准、国际标准、参考的其他标准。针对不同的项目,实际的优先级可能不完全和上述优先级一致。取决于双方项目前期的协商;不同规范、标准不一致时,可能最常用的做法是参考最严的标准。
现在,EPC海运工程公司现在越来越重视公司内部的标准化建设,尤其是跨国公司,一般都有完整的内部标准或者研究成果。尤其是针对一些前沿的情况,往往标准不能给出推荐做法,此时EPC公司可将自己研究的推荐做法交由业主审核,若业主同意,EPC公司可以按照自己推荐做法进行设计、建造,极大地发挥EPC公司的自主性。

 DownLoad:
DownLoad: