
-
在托卡马克装置中对等离子体位形重建是服务于等离子体稳定放电的重要技术。实时重建托卡马克装置放电等离子体位形在优化等离子体的运行参数[1],减少某些不稳定性的发生,控制真空室壁和偏滤器靶板上的热负荷和粒子沉积,以及减少对真空室内部件的损伤,都具有重大意义。
为了估计或者测量等离子体边缘的位形,现代托卡马克装置主要是采用磁测量的方式获得装置的磁场和磁通信息来对等离子体边缘进行重建,例如:XLOC, EFIT。但是,磁测量的方式存在一些问题:第一点,磁测量受装置的电磁环境影响较大,比如磁体的扰动会对等离子体的宏观行为产生很大的影响[2],磁体的涨落可能使得磁力线随机扰乱;第二点,磁测量时间导数的积分运算可能会导致电磁测量值的漂移[3]。
结合聚变反应堆长时间稳定运行的要求,为了解决磁测量出现的问题[4-6],开发新的等离子体边缘重建算法具有重大意义。伴随着计算机性能的提高以及高速可见光相机的发展,基于计算机视觉和高速可见光诊断系统的等离子体边界重建技术开始应用在托卡马克等离子体位形的实时重建中。从等离子体放电时的图像中获取等离子体的可见光边缘信息可以避免采用磁测量方式在测量时遇到的问题[7]。
虽然可以基于图像数据获得等离子体可见光边缘信息,但是该边缘信息依旧是像素坐标系的一个描述,实际的等离子体位形反馈控制系统需要的反馈信号是等离子体边缘在托卡马克坐标系中的坐标。针对该问题以及反馈控制系统实时性的要求[8],本文提出了一种基于全连接神经网络(Deep Neural Networks, DNN)的重建算法。该算法可以实现等离子体边缘像素坐标到托卡马克坐标系坐标的快速转换。
-
计算机视觉的重建任务有两个步骤:首先对需要重建的目标进行提取;再者是对目标重建。提取重建目标是使用边缘提取算法从图像中获取重建目标的像素坐标信息。目标重建部分是建立像素坐标系和世界坐标系的对应关系,目前是对相机进行标定来确定两个坐标系之间的对应关系。
-
在现阶段存在很多的边缘提取算法,例如Canny算子,Sobel算子和基于图像显著性的边缘提取算法。Canny算子可适用于不同的场合,它的参数允许根据不同实现的特定要求进行调整以识别不同的边缘特性;Sobel算子对噪声具有平滑抑制作用,可以产生较好的检测效果,但是得到的边缘较粗,且可能出现伪边缘。鉴于整个系统对实时性的要求,使用基于图像显著性的快速边缘提取算法获取等离子体可见光边缘的像素坐标信息,能够有效获取等离子体可见光边缘的像素坐标信息,且花费的时间比传统的 Canny算子和 Sobel算子要少很多。
-
目标重建是使用相机标定方法,将目标的图像信息映射到世界坐标系中。相机标定是对物体成像过程的数学建模,该建模包括目标角点的射影变换和相机的透镜畸变。其中射影变换对应的关系:
$$ \left[\begin{array}{c}u\\ v\end{array}\right]=s\left[\begin{array}{c}\begin{array}{ccc}{f}_{x}& \gamma & {u}_{0}\end{array}\\ \begin{array}{ccc}0& {f}_{y}& {v}_{0}\end{array}\\ \begin{array}{ccc}0& 0& 1\end{array}\end{array}\right]\left[\begin{array}{cc}{\boldsymbol{R}}& \overrightarrow{{\boldsymbol{t}}}\end{array}\right]\left[\begin{array}{c}{x}_{w}\\ {y}_{w}\\ {z}_{w}\end{array}\right] $$ (1) 其中令
$ \overrightarrow{{\boldsymbol{q}}}={\left[\begin{array}{cc}u& v\end{array}\right]}^{T} $ ,${\boldsymbol{M}}=\left[\begin{array}{c}\begin{array}{ccc}{f}_{x}& \gamma & {u}_{0}\end{array}\\ \begin{array}{ccc}0& {f}_{y}& {v}_{0}\end{array}\\ \begin{array}{ccc}0& 0& 1\end{array}\end{array}\right]$ ,$ {f}_{x}=f*{s}_{x}, {f}_{y}= f*{s}_{y} $ ,${\boldsymbol{W}}=\left[\begin{array}{cc}{\boldsymbol{R}}& \overrightarrow{{\boldsymbol{t}}}\end{array}\right]$ ,$ \overrightarrow{{\boldsymbol{Q}}}={\left[\begin{array}{ccc}{x}_{w}& {y}_{w}& {z}_{w}\end{array}\right]}^{T} $ ,式中:
$ \overrightarrow{{\boldsymbol{q}}} $ ——角点像素坐标;s ——一个任意的比例因子;
$ {\boldsymbol{M}} $ ——相机内参矩阵;$ {u}_{0} $ ,$ {v}_{0} $ ——相机芯片在成像过程中不在图像坐标系中心的建模参数;$ f $ ——焦距;$ {s}_{x},{s}_{y} $ ——CCD芯片的像元尺寸;$ {\boldsymbol{W}} $ ——相机外参矩阵(R为旋转矩阵,$\overrightarrow{\boldsymbol{t}}$ 为平移向量);$ \overrightarrow{{\boldsymbol{Q}}} $ ——世界坐标系坐标(用于描述相机的位置)。理论上通过射影变换就已经可以实现像素坐标系向世界坐标系的转换。但是事实上,不存在完美的相机透镜,在相机成像时,都会存在因为相机透镜而引起的畸变,透镜畸变包括径向畸变和切向畸变。对于径向畸变,成像装置的光学中心处畸变为0,畸变随着点与光学中心的距离增大而增大。使用泰勒展开式对它建模:
$$ {x}_{\mathrm{c}\mathrm{o}\mathrm{r}\mathrm{r}\mathrm{e}\mathrm{c}\mathrm{t}\mathrm{e}\mathrm{d}}=x*\left(1+{k}_{1}{r}^{2}+{k}_{2}{r}^{4}+{k}_{3}{r}^{6}\right) $$ (2) $$ {y}_{{\rm{corrected}}}=y*\left(1+{k}_{1}{r}^{2}+{k}_{2}{r}^{4}+{k}_{3}{r}^{6}\right) $$ (3) 式中:
$ \left[\begin{array}{cc}x& y\end{array}\right] $ ——畸变点的原始像素坐标;$\left[\begin{array}{cc}{x}_{{\rm{corrected}}}& {y}_{{\rm{corrected}}}\end{array}\right]$ ——矫正后的像素坐标;$ r $ ——畸变点到光学中心处的距离。对于切向畸变引入参数
$ {p}_{1} $ ,$ {p}_{2} $ ,中和两种畸变得到矫正公式:$$ {x}_{{\rm{corrected}}}=x+\left[2{p}_{1}xy+{p}_{2}\left({r}^{2}+2{x}^{2}\right)\right] $$ (4) $$ {y}_{{\rm{corrected}}}=y+\left[2{p}_{2}xy+{p}_{1}\left({r}^{2}+2{y}^{2}\right)\right] $$ (5) 相机标定的过程既包括线性的射影变换又包括非线性的畸变矫正。单目相机标定一般用于离线的目标重建,这不符合托卡马克装置对实时性的要求,因此需要开发新的算法进行实时重建。通过分析相机标定发现标定过程包含了很多的线性和非线性参数,因此相机标定可以转换为多变量的非线性拟合。
-
全连接神经网络是由多个神经元构成的多层神经网络。神经元是以生物研究及大脑的响应机制而建立的拓扑结构网络,模拟生物的神经元细胞,多个树突末端给出刺激信号,在接受刺激信号之后做出响应。DNN的结构不固定,一般由一层输入层,一层输出层和输入层与输出层之间的隐藏层构成。DNN是最朴素的神经网络,它具有的大量网络参数几乎可以拟合任何函数,所以它具有非常强的非线性拟合能力。
-
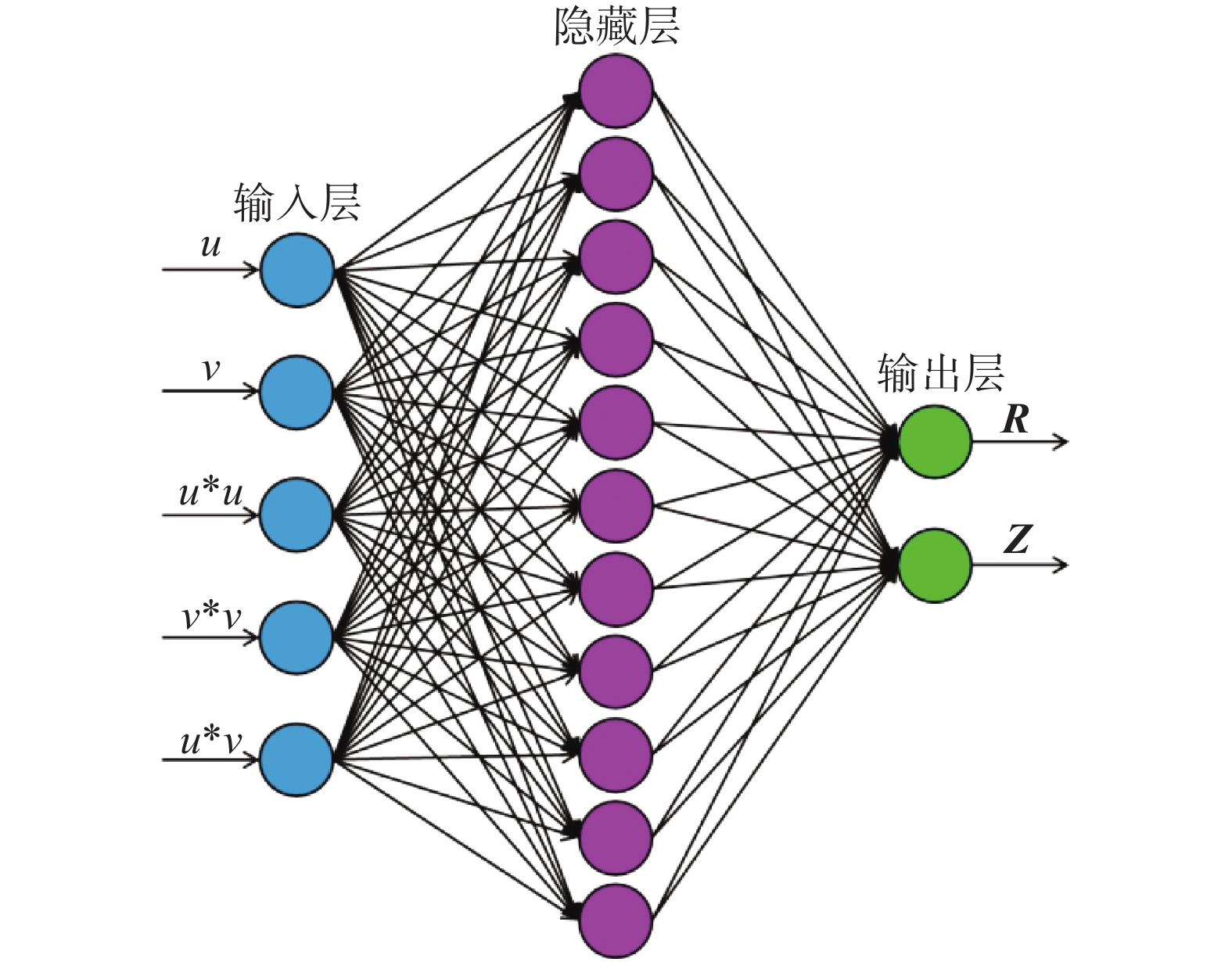
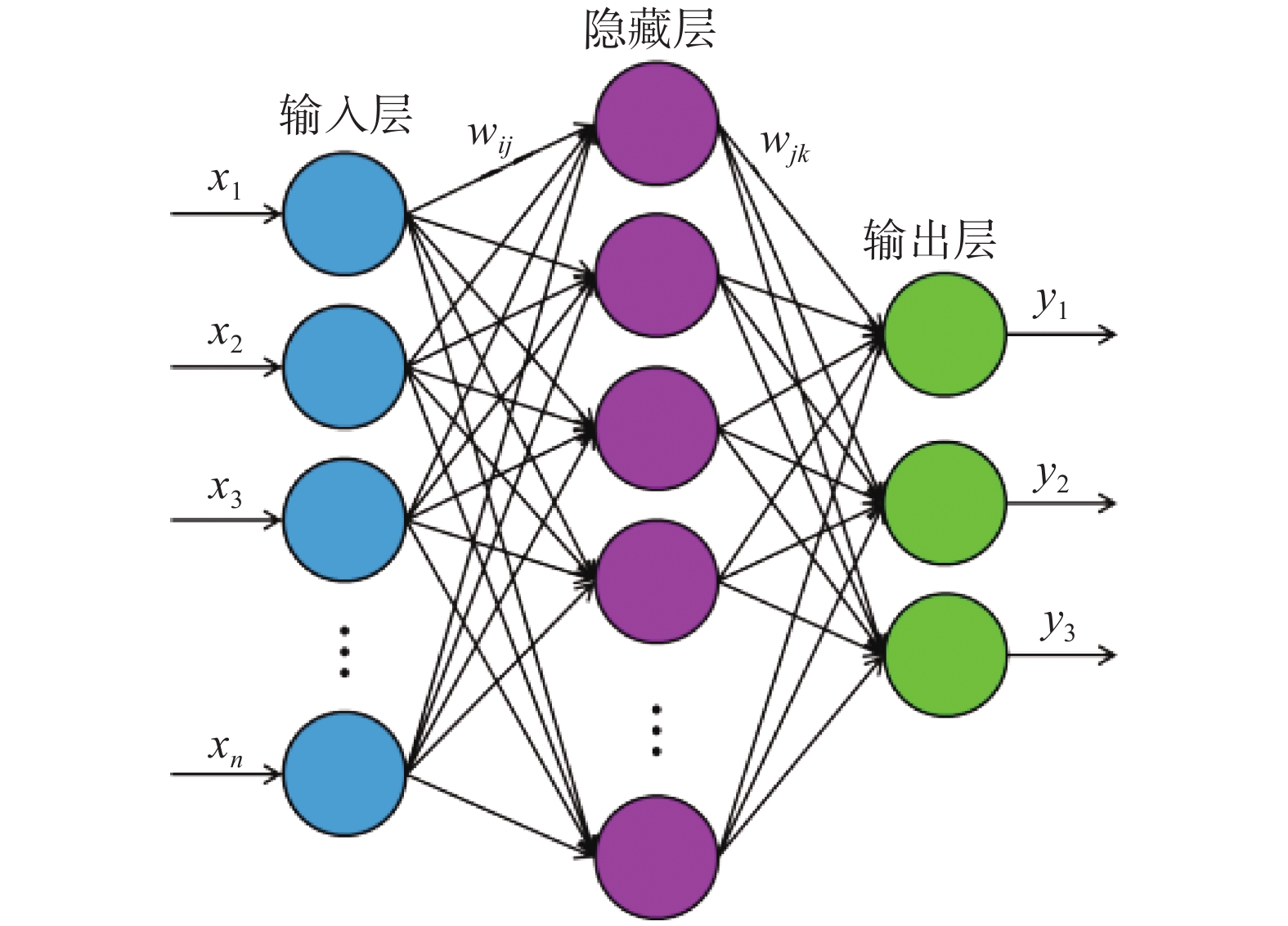
典型的全连接神经网络有三层:一层输入层,一层隐藏层,一层输出层,图1为典型的三层全连接神经网络结构图。
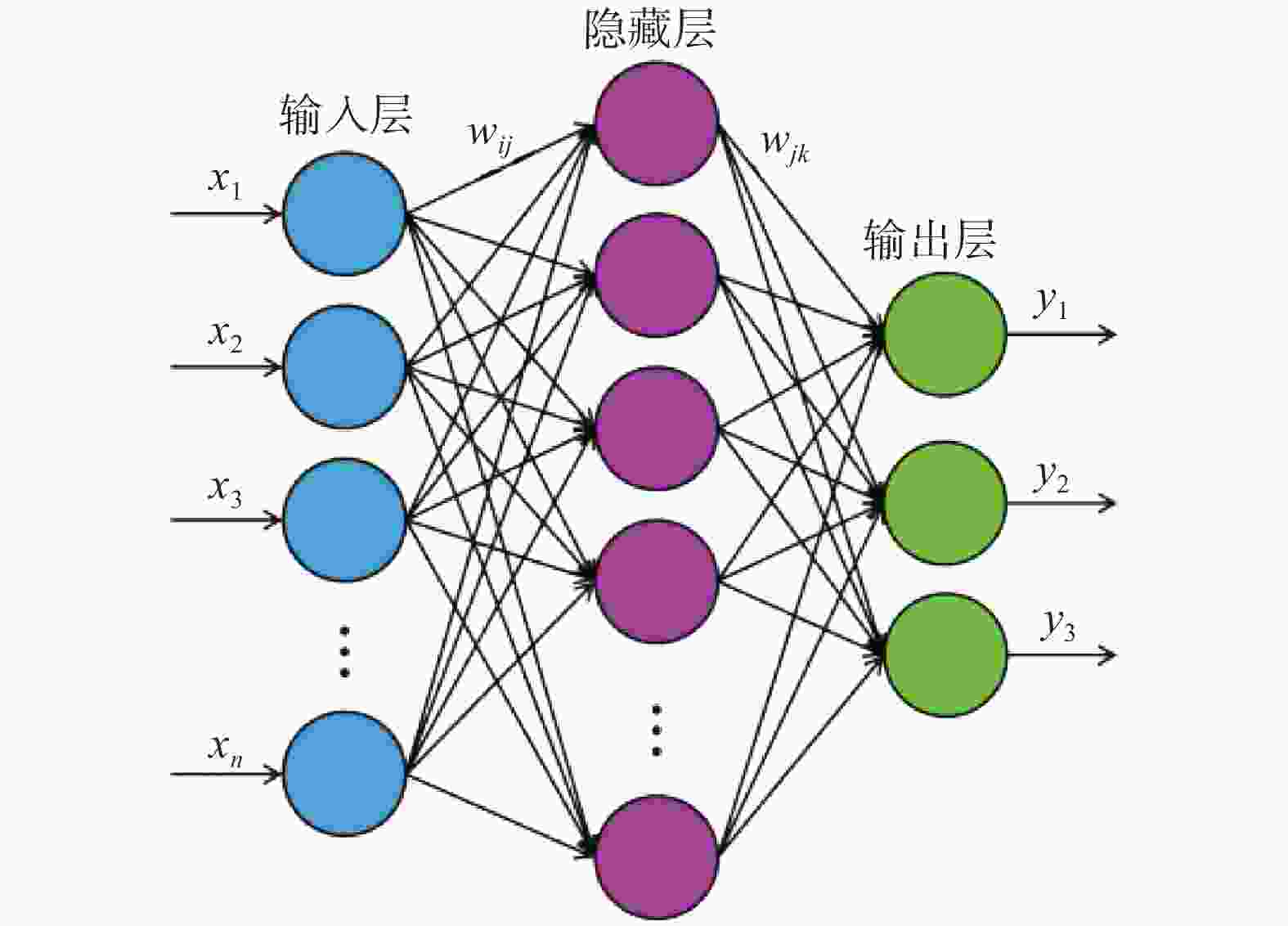
Figure 1. Structural diagram of a typical three-layer fully connected neural network
结合相机标定的射影变换和畸变矫正公式(1)、(2)、(3),总结出特征向量
$ {\boldsymbol{I}}=\left[\begin{array}{ccc}u& v& u*u\end{array}\begin{array}{cc}v*v& u*v\end{array}\right] $ ,$ I $ 作为神经网络的输入信号。$ {\boldsymbol{\alpha}} =\left[\begin{array}{cc}{\boldsymbol{R}}& {\boldsymbol{Z}}\end{array}\right] $ 为托卡马克坐标系坐标,该向量作为神经网络的输出。全连接神经网络隐藏层的层数和每层神经元的个数不仅会影响网络参数的数量而且会影响拟合的效果。通过反复的实验对参数进行调整,最终确定隐藏层为一层,隐藏层神经元个数为11个。本文重建算法构造的神经网络结构如图2所示: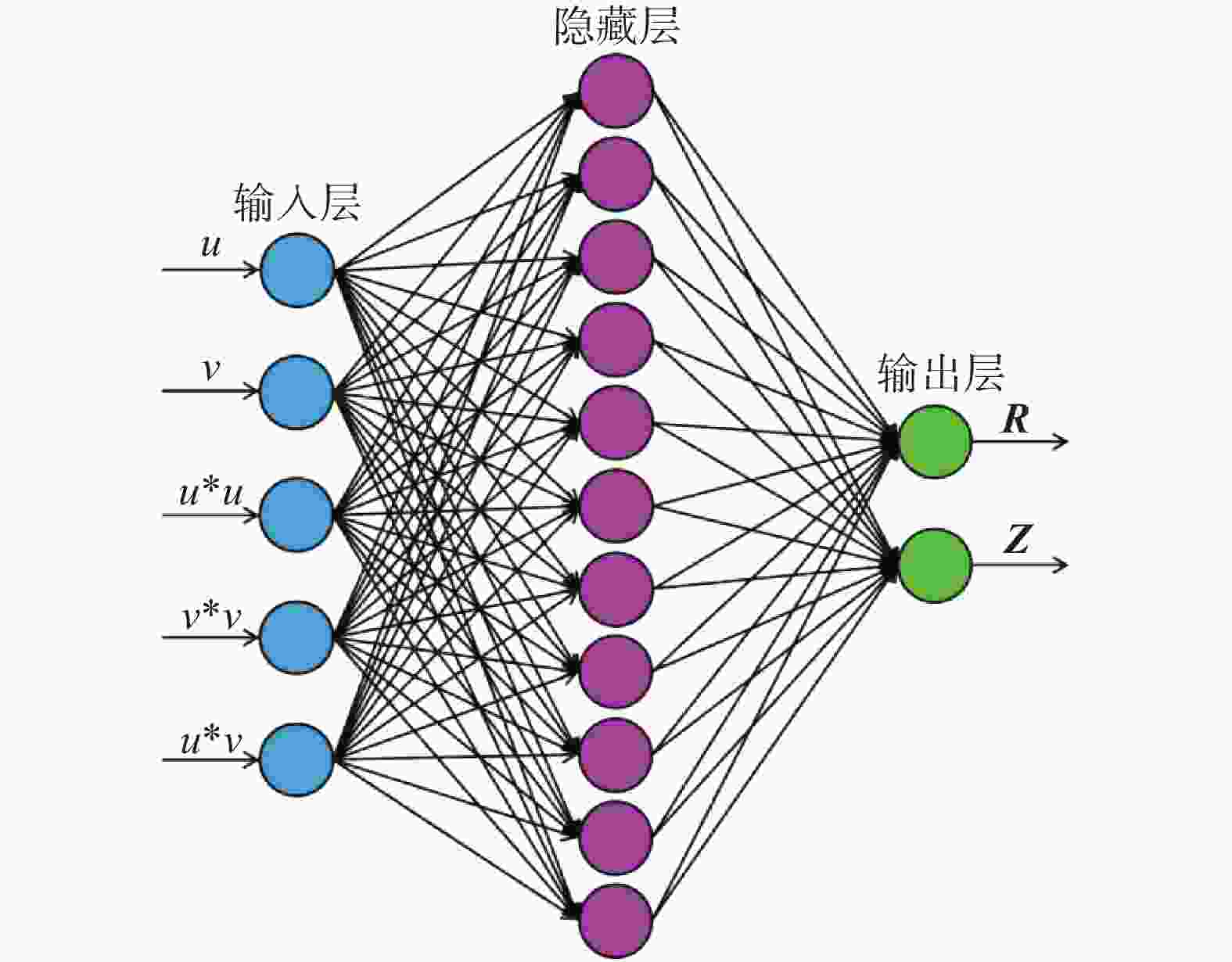
Figure 2. Reconstructed BP neural network structure diagram
-
全连接神经网络的数据集是对应的等离子体边缘像素坐标与托卡马克坐标的点集。在等离子体稳定放电的时段,对特点时间片等离子体放电图像提取边缘角点。经计算每炮数据等离子体稳定放电时段为4.54~6.70 s,在该时间段内截取27个时间片段,每个时间片段的等离子体放电图像边缘角点为117个。一共选取了五炮历史的等离子体放电数据,数据集包含了15 795组对应数据。
-
近年来,在使用大数据训练神经网络模型的趋势下,机器学习和深度学习在很多领域取得了很大的成功。但是在很多工程实验中,可能会出现数据获取难度大或者标注样本较少的问题。这类问题会导致许多的神经网络模型效果不佳或者模型失效。为了解决这些问题,小样本学习开始进入学者的视野。小样本学习是根据人类学习观点(人类只需要少量数据就能快速学习)而提出的概念。小样本学习的目的是通过少量的数据学习从而解决问题的模型,使机器学习和深度学习更接近人类思维。
-
上文介绍数据集包含了15 795组对应的点集,但是存在一些问题:首先,在等离子体放电实验中,由于每次放电充入的等离子体数量不完全一致导致等离子体在放电达到稳定时等离子体边缘位置出现偏差,该偏差可能达到3
$ ~ $ 5 cm;此外,15 795组对应的点集给数据的采集和标注工作带来了很大的麻烦。为了减少托卡马克实验带来的系统误差和制作数据集的工作量,使用基于数据增强的小样本学习来解决问题。通过将每个时间片段的117组对应点集削减为51组位置相对稳定的点集和剔除五炮数据中异常数据来达到数据增强的效果。 -
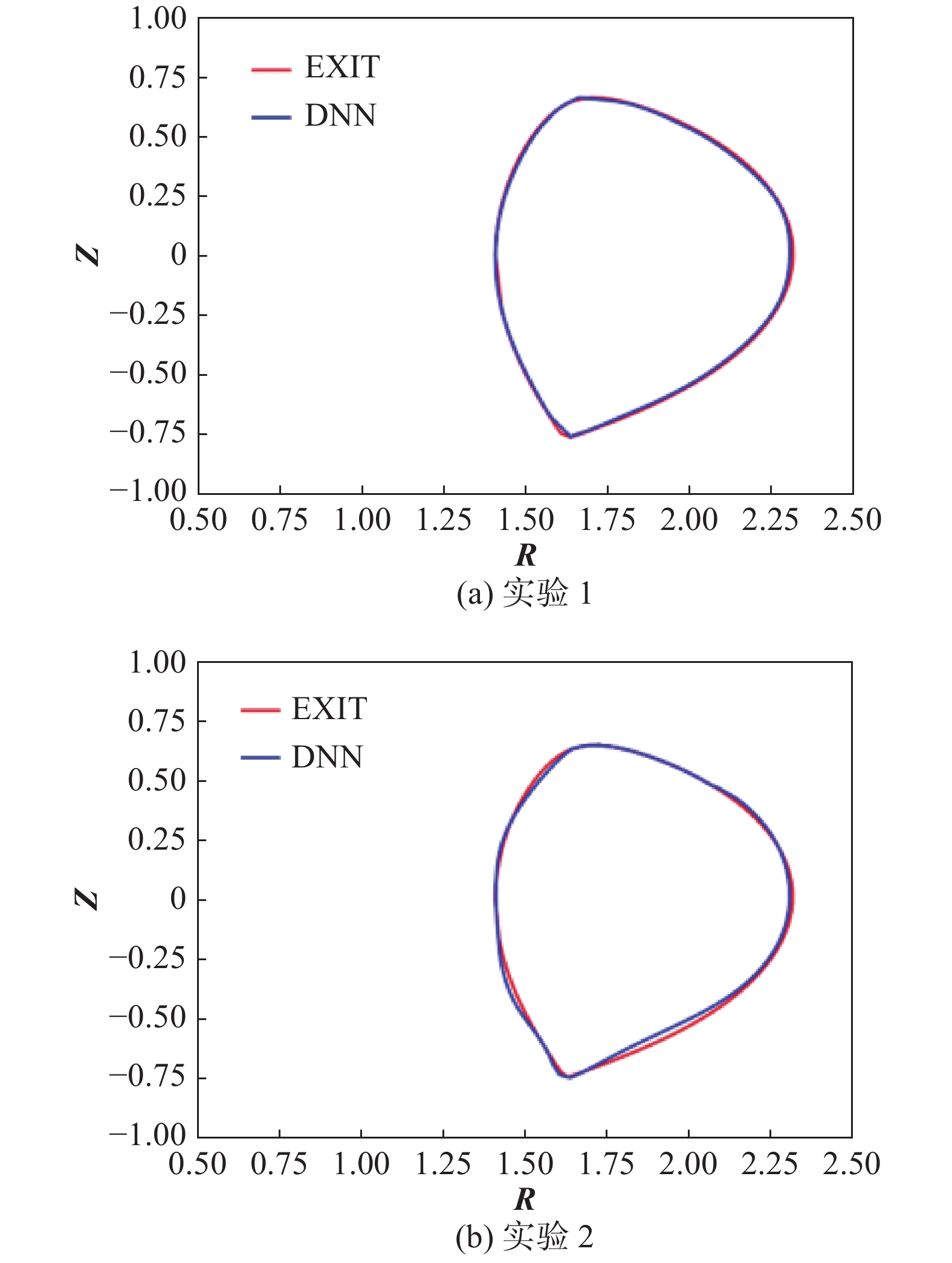
实验做了两组对照实验,第一组实验(实验一)是没有使用小样本学习的全连接神经网络进行重建,第二组实验(实验二)是使用小样本学习的全连接神经网络进行重建。图3为两组实验的重建效果与电磁重建效果的对比图。表1是两组实验重建的误差统计,其中距离为欧式距离。
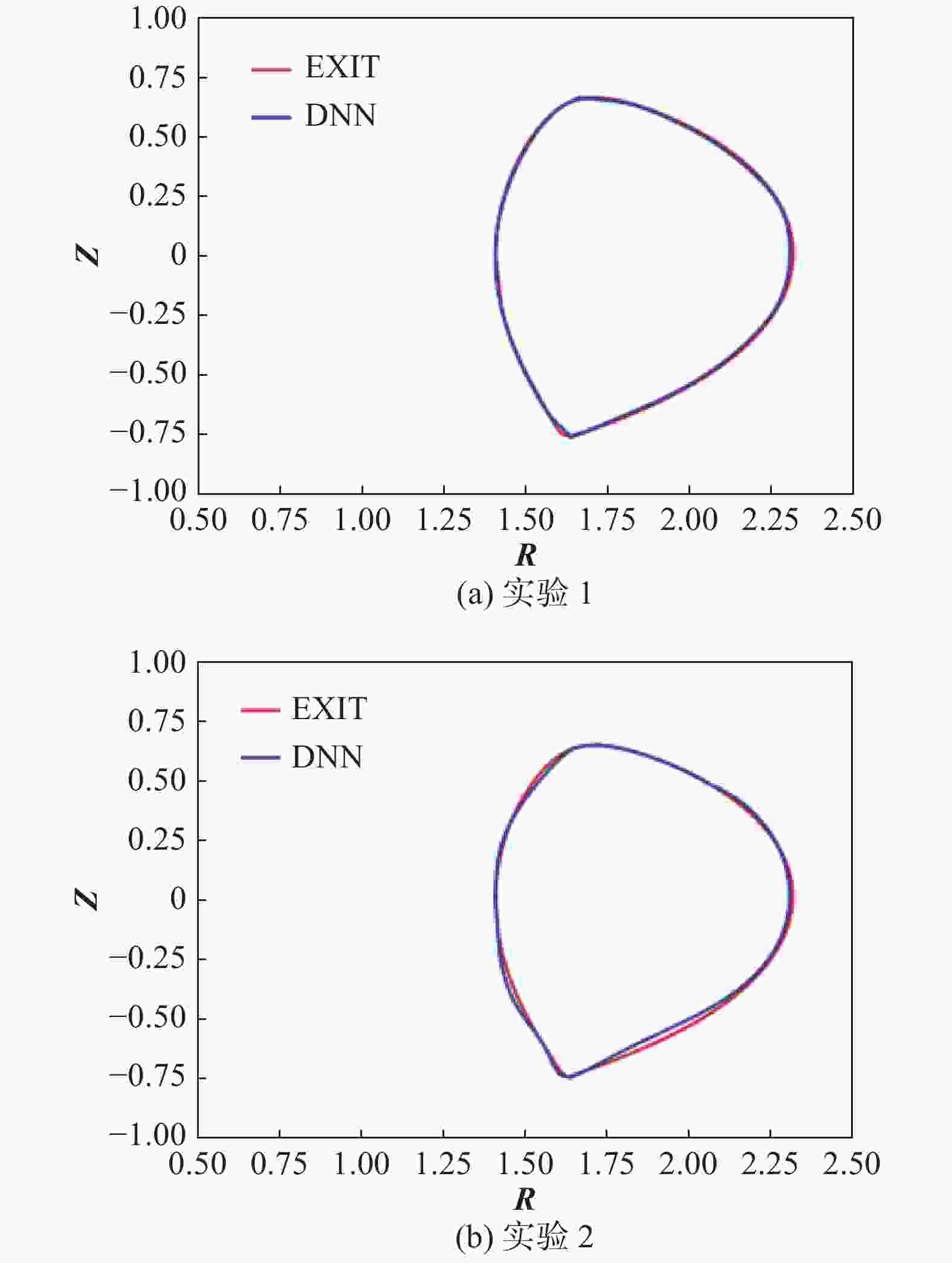
Figure 3. Comparison of the reconstruction effect of magnetic method
距离/m 实验一 实验二 0~0.01 85% 83% 0.01~0.02 13% 16% $\geqslant 0.02$ 2% 1% Table 1. Error statistics table for different experiments
本实验重建阶段实质上是神经网络的推理过程,该推理过程花销的时间为66.9 us。实验使用的计算机处理器为CPU为Intel(R) Core(TM) i7-10750H CPU @ 2.60GHz,内存为64 GB,编译环境为Visual Studio 2019。
通过重建的效果图来看,实验二重建的一些位置出现部分偏差,但是从误差统计表来看实验二的重建总体上不弱于实验一,因为工程上要求的精度是距离控制在0.02 m以内。实验二在关键位置即等离子体位形左端、右端、上端、下端有较好的拟合效果,这对等离子体位形控制有着重要的作用。实验一和实验二总体上都可以满足精度要求,但是就数据集制作的工作量和难度上实验一都要远大于实验二。两组实验也同时证明了全连接神经网络可用于目标重建的可行性,也证明了全连接神经网络可用于等离子体位形实时重建的工作。同时该算法的时间开销为66.9 us,为实现系统实时性的要求提供了基础。
-
在托卡马克装置放电过程中,提取等离子体图像数据中的等离子体边缘像素坐标进行实时重建可以弥补磁测量方式的不足之处。但是基于图像数据进行重建有很大的时间消耗,这样就很难满足反馈控制系统的实时性要求。本文基于全连接神经网络的重建算法可以快速的进行等离子体边缘的重建,并且本文还针对工程实验中数据集制作难度大的问题提出使用小样本学习的解决办法。但是在引入小样本学习后重建效果没有得到很大的提升,在后面的实验中会继续优化小样本学习实验,让等离子体边缘重建效果有大的提升。
Boundary Reconstruction of Tokamak Plasma Based on Deep Neural Networks
doi: 10.16516/j.gedi.issn2095-8676.2022.02.010
- Received Date: 2022-06-02
- Rev Recd Date: 2022-06-20
- Available Online: 2022-06-24
- Publish Date: 2022-06-25
-
Key words:
- tokamak /
- camera calibration /
- visible light edge reconstruction algorithm /
- fully connected neural network /
- few-shot learning
Abstract:
| Citation: | LI Jiayi, GU Shunping, GU Mengjun, ZHANG Heng, SHA Rui. Boundary Reconstruction of Tokamak Plasma Based on Deep Neural Networks[J]. SOUTHERN ENERGY CONSTRUCTION, 2022, 9(2): 77-81. doi: 10.16516/j.gedi.issn2095-8676.2022.02.010

|





























 DownLoad:
DownLoad: