
-
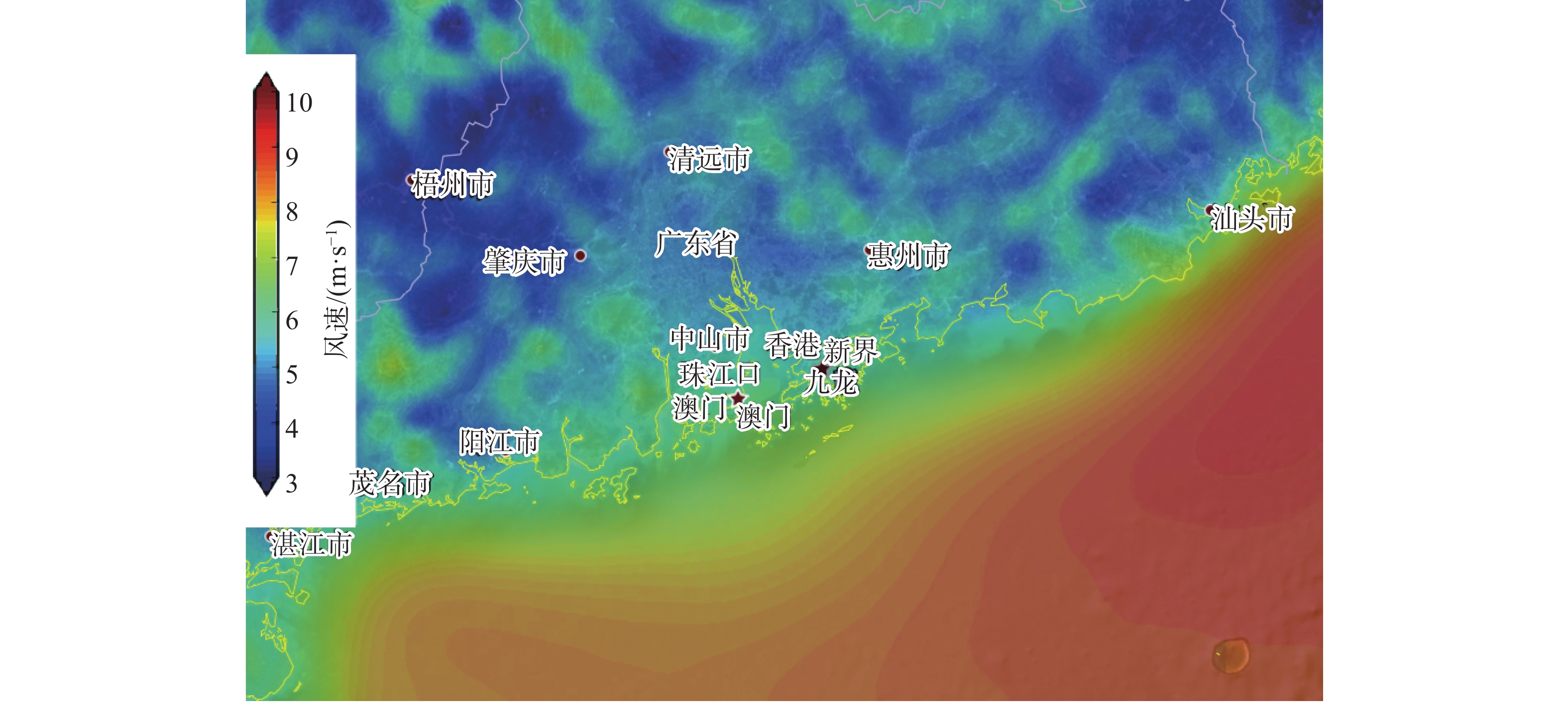
近十年来,随着全球能源向低碳能源转型,海上风电产业正蓬勃发展并形成规模化势头,中国在近年来也加速发展海上风电产业。截至2022年底,全球海上风电累计装机64.3 GW,中国累计海上风电装机占比49%,占据全球第一大的装机市场,并且2022年新增海上风电装机容量排名第一[1]。中国东南沿海年平均风速分布如图1所示。中国南海海域辽阔,深远海海上风能资源丰富,年平均风速可达9 m/s以上,具有开发深远海风电的巨大潜力。其中,广东省35~50 m水深的近海深水区海上风电规划容量在当前规划总容量的占比超过85%,而超过50 m水深海域的海上风电可开发容量更为巨大,深远海风电是广东省未来能源发展的重要方向[2]。
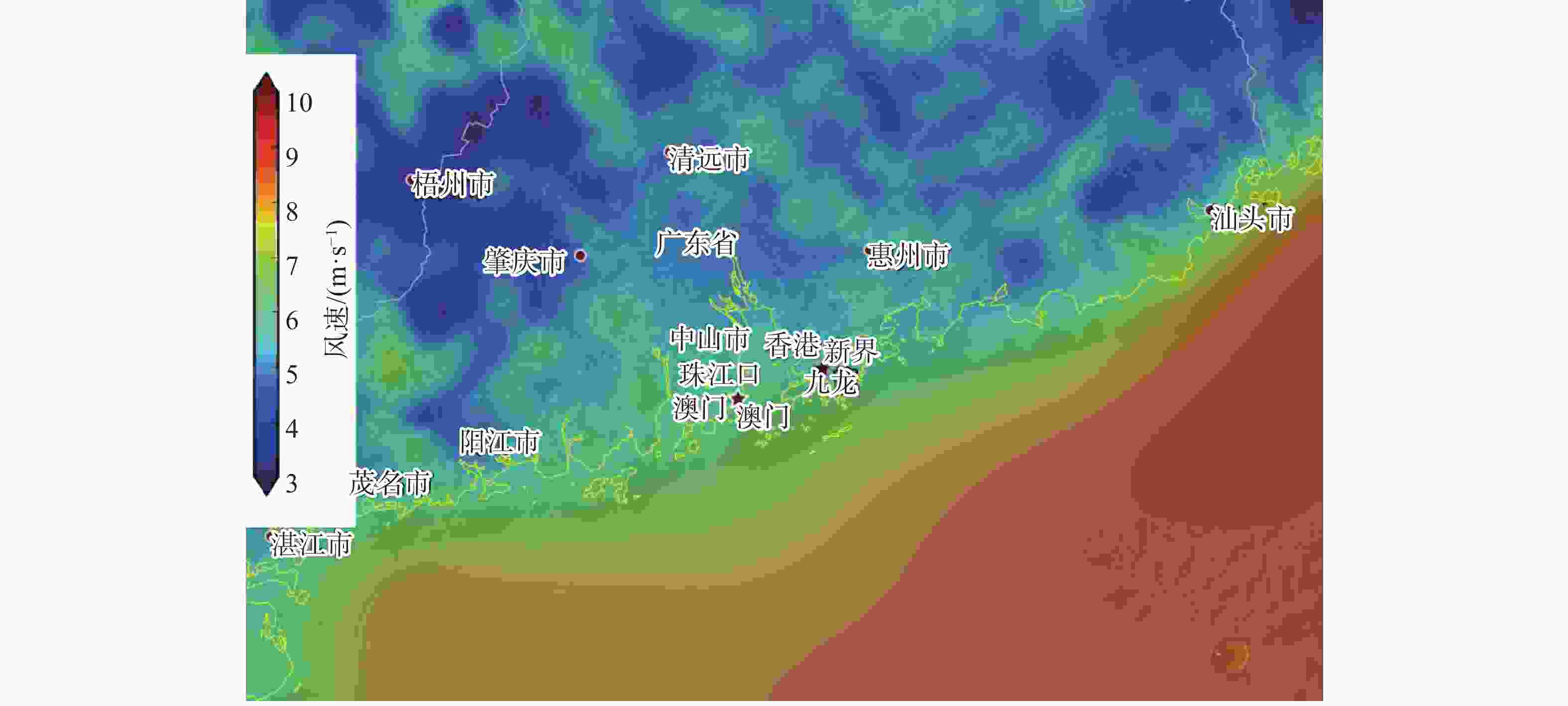
Figure 1. Annual average wind speed distribution map in the southeast coast of China
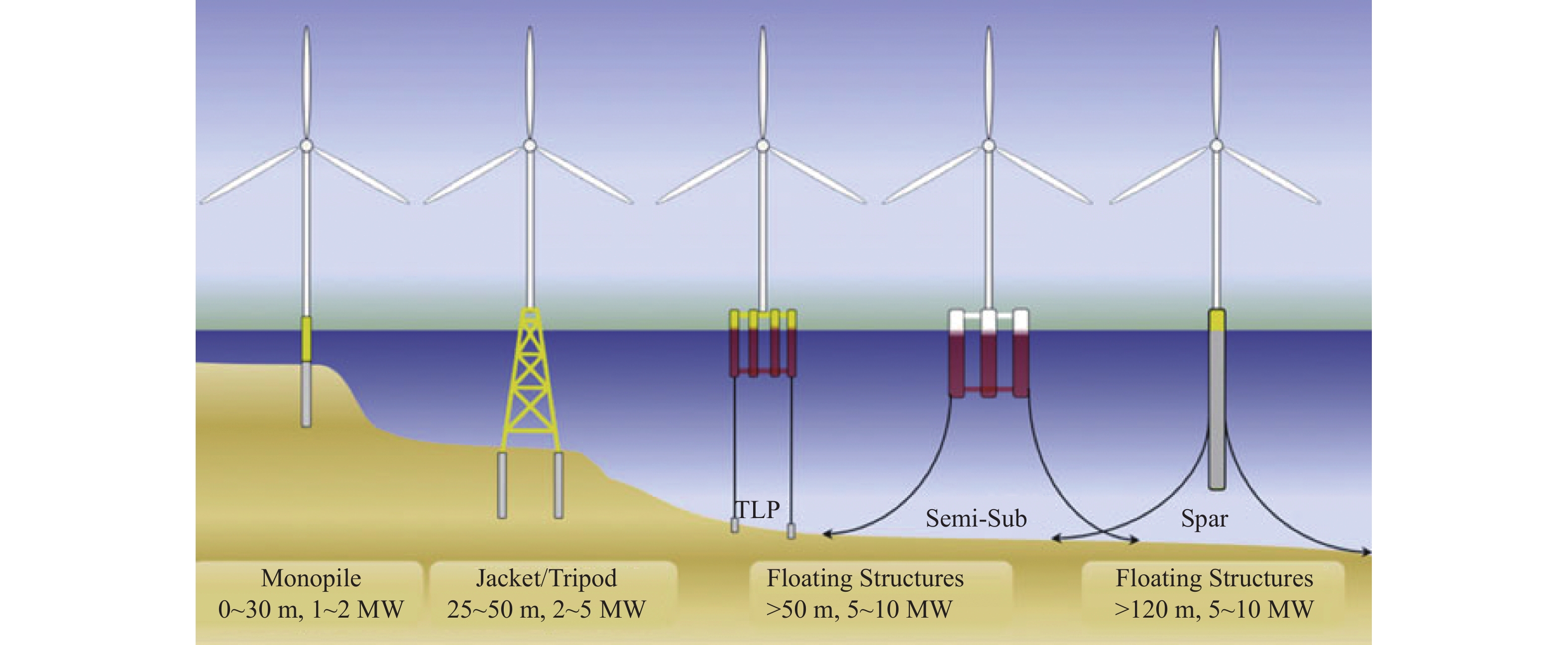
海上风机基础形式如图2所示。受技术和工程经济性限制,海上风机支撑结构形式也必然伴随着水深而发生变化,从固定式的支撑结构演变为漂浮式的支撑结构[3]。海上漂浮式风机极大地拓展了海上风电的应用范围,并且具有诸多的优势[4],例如:机位部署更加灵活、可在岸上完成整体组装、海上施工安装更加方便、对海床生态环境友好、可完全拆解与迁移、更经济地搭载更大功率的风电机组等。
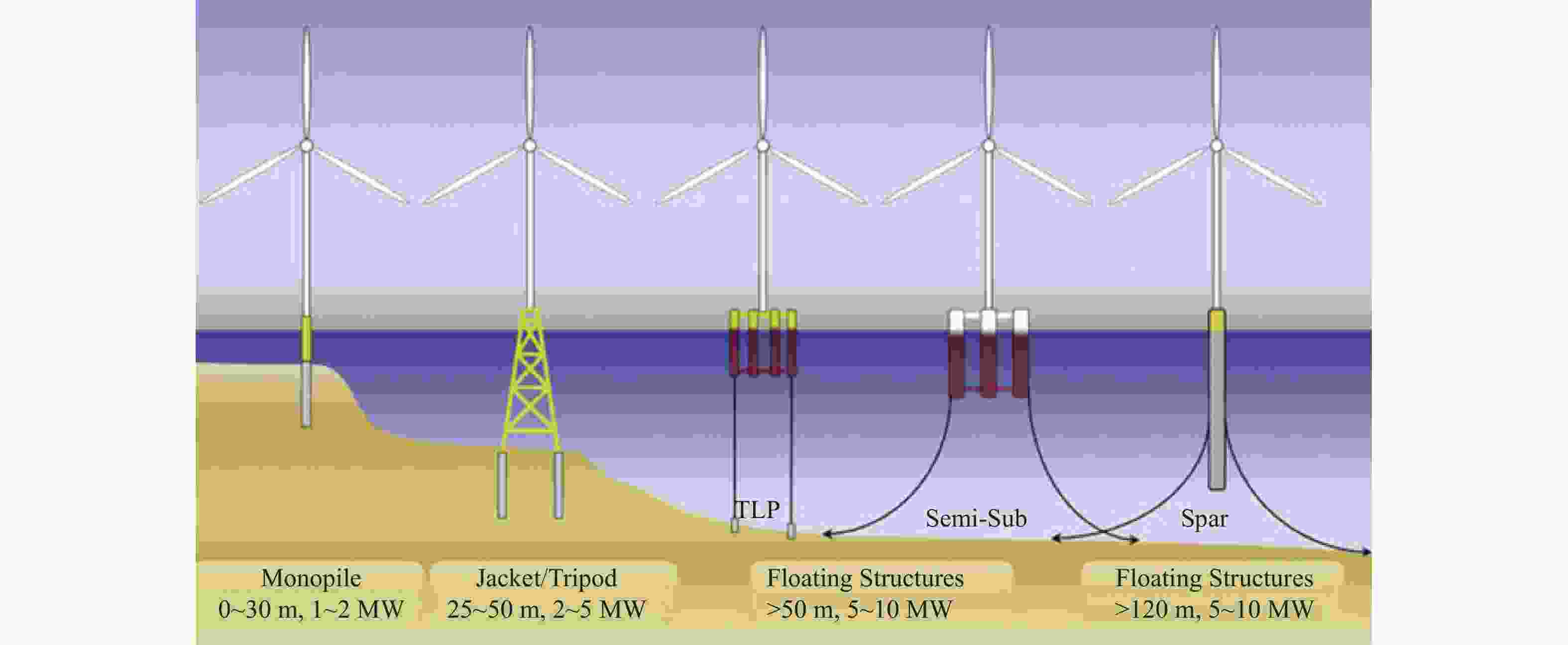
Figure 2. Foundation types of offshore wind turbines[3]
相比于固定式风机基础,漂浮式风机基础受力状态更加复杂,浮式基础作为顺应式结构,对波浪荷载敏感,运动幅度较大,气动荷载-结构-水动力-系泊-控制系统的耦合作用更加明显[5],尤其对于大容量的风电机组,风机荷载导致的气动-运动耦合作用更加明显,解耦分离迭代的设计方法会给浮式风电设计造成较大的计算误差,尤其在目前缺乏规模化的浮式风电场建设经验情况下,荷载抗力系数和安全系数取值难以准确把握,容易造成设计过于保守或偏激。因此,需要采用一体化计算软件分析海上漂浮式风机系统耦合动力响应特性。
当前的海上漂浮式风机一体化时域计算软件可以大致划分为如下几类:一类从传统的海洋工程水动力软件发展而来,如Sima[6]、OrcaFlex[7]、Deeplines[8]、3DFLOAT[9]等;一类从传统的固定式海上风机计算分析软件发展而来,如FAST[10-11]、GH Bladed[12]、HAWC2[13]等;一类则来自于航空航天、车辆工程等多体机械软件仿真软件,如SIMPACK[14]、MSC- ADAMS[15]等。还有一些基于多个软件进行联合数值模拟,如AQWA-FAST[16]。近些年,部分学者针对浮式风机动力特点进行针对性的一体化软件开发,如DARwind[17-18]等。还有一些学者通过CFD技术对海上浮式风机进行数值计算[19-20],部分统计如表1所示。
名称 空气动力学 水动力学 结构动力学 系泊模型 FAST[10-11] (BEM/GDW)+DS+FVM PF+QD+(QTF)+MR+NA T: Mod/MB
P: RigidQS+FE+LM Bladed[12] (BEM/GDW)+DS MR+(IP+IWL) T: Mod/MB
P: RigidQS HAWC2[13] (BEM/GDW)+DS MR T: MB/FE
P: MB/FEFE 3Dfloat[9] BEM+FDT MR+(IWL) T: FE
P: FEFE Sima[6] (BEM/GDW)+DS PF+MR T: FE
P: FEFE DARwind[17-18] BEM PF+MR+OTF+IP+IWL+QD T: Mod/MB
P: RigidOS+LM 注:BEM-叶素动量理论;GDW-广义动态尾迹;DS-动态失速;FVM-自由涡;FDT-过滤后的动态推力;PF-势流理论;QD-二次拖曳力;OTF-二次传递函数;MR-Morison方程;NA-Newman近似;IP-瞬时位置;IWL-瞬时水位;T-风机;P-平台;Mod-模态;MB-多体动力学;FE-有限元;Q-准静态;LM-集中质量。 Table 1. Statistical table of time-domain coupling calculation program for floating offshore wind turbines
文章结合广东近海深水区某海上风电场,针对10 MW级的混凝土半潜式浮式风机开展一体化仿真计算,并且研究其在发电工况和极端工况下的耦合动力响应特性,以期揭示近海深水区大容量半潜型浮式风机的动力响应特性和关键设计因素。
-
OO-Star[21]风力机浮式基础由挪威Olav Olsen公司研发,属于半潜型平台,其基础底部是一个“星”型浮筒结构,上面布置一个中央立柱,外围设置3个立柱结构,由预应力钢筋混凝土材料构成,具体结构形式如图3所示。文章采用DTU 10 MW的风力发电机组,RNA总重为676 t,额定功率为10 MW,风机塔柱与OO-Star基础中央立柱连接,关于该风电机组和塔筒的详细数据可参考文献[22]。上述的漂浮式风机整体吃水为22 m,排水量2.350 9E+04 m3,典型参数见表2。
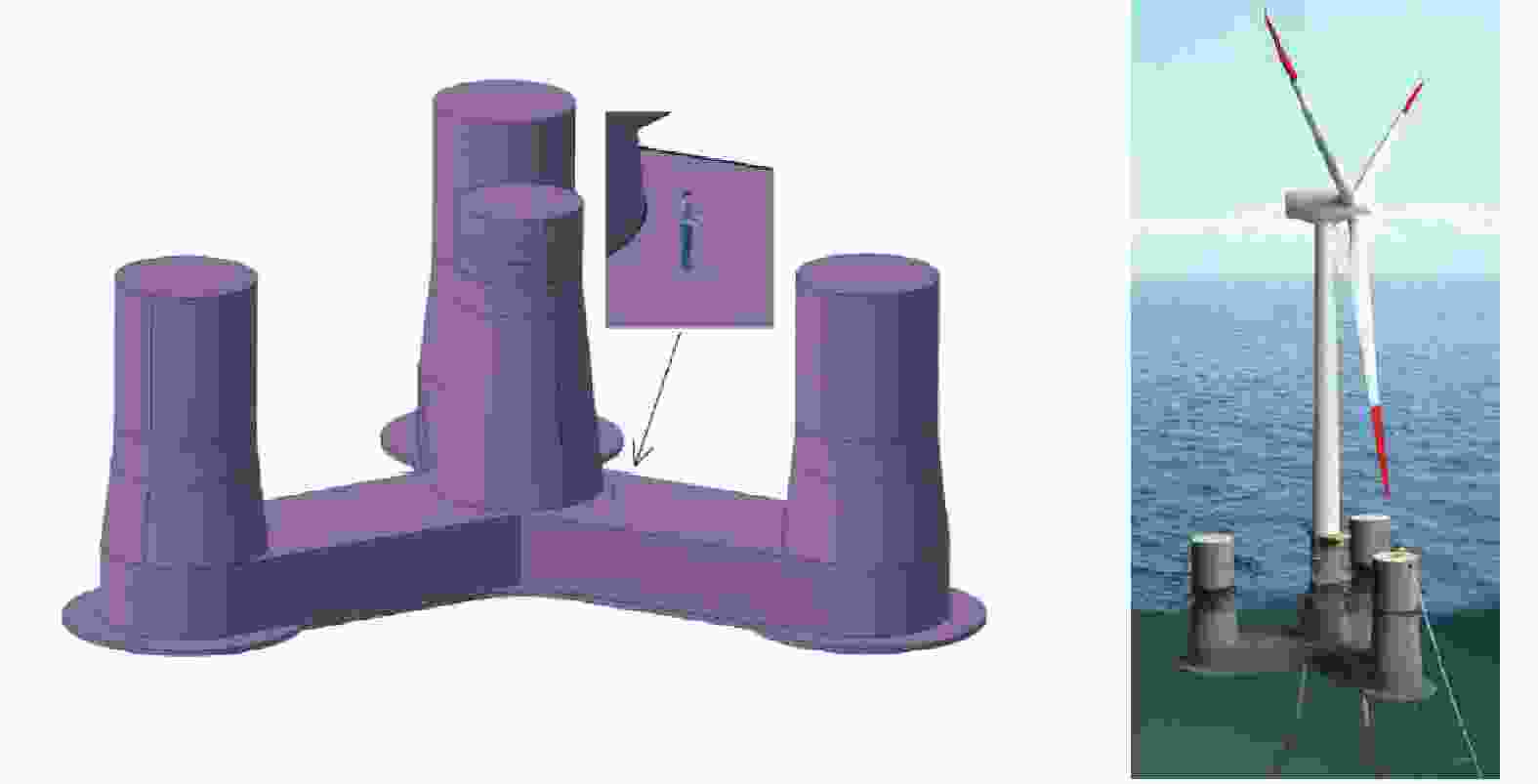
Figure 3. Structure of the OO-Star floating offshore wind turbines[22]
名称 数值 叶轮质量/t 230.72 机舱质量/t 446 塔柱质量/t 1 257 平台法兰顶距水面/m 11.0 基础质量(不含塔柱,系泊系统)/t 2.17E+04 重心高(相对水面)/m −15.22 平台横摇惯性矩(含压载)/(kg·m2) 9.43E+09 平台纵摇惯性矩(含压载)/(kg·m2) 9.43E+09 平台首摇惯性矩(含压载)/(kg·m2) 1.63E+010 设计吃水(含系泊)/m 22.0 总排水量/m3 2.350 9E+04 Table 2. Parameters of the OO-Star floating wind turbine[22]
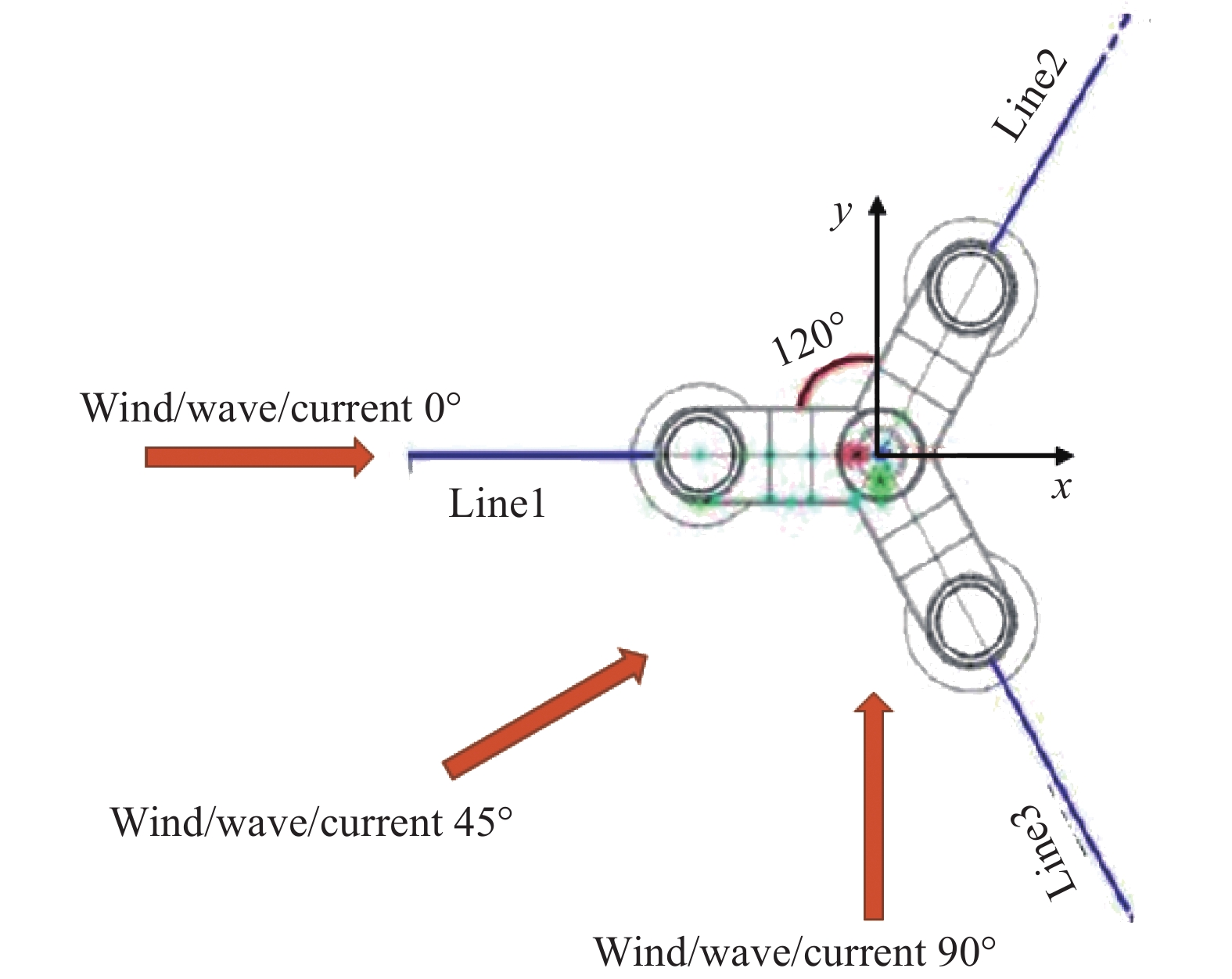
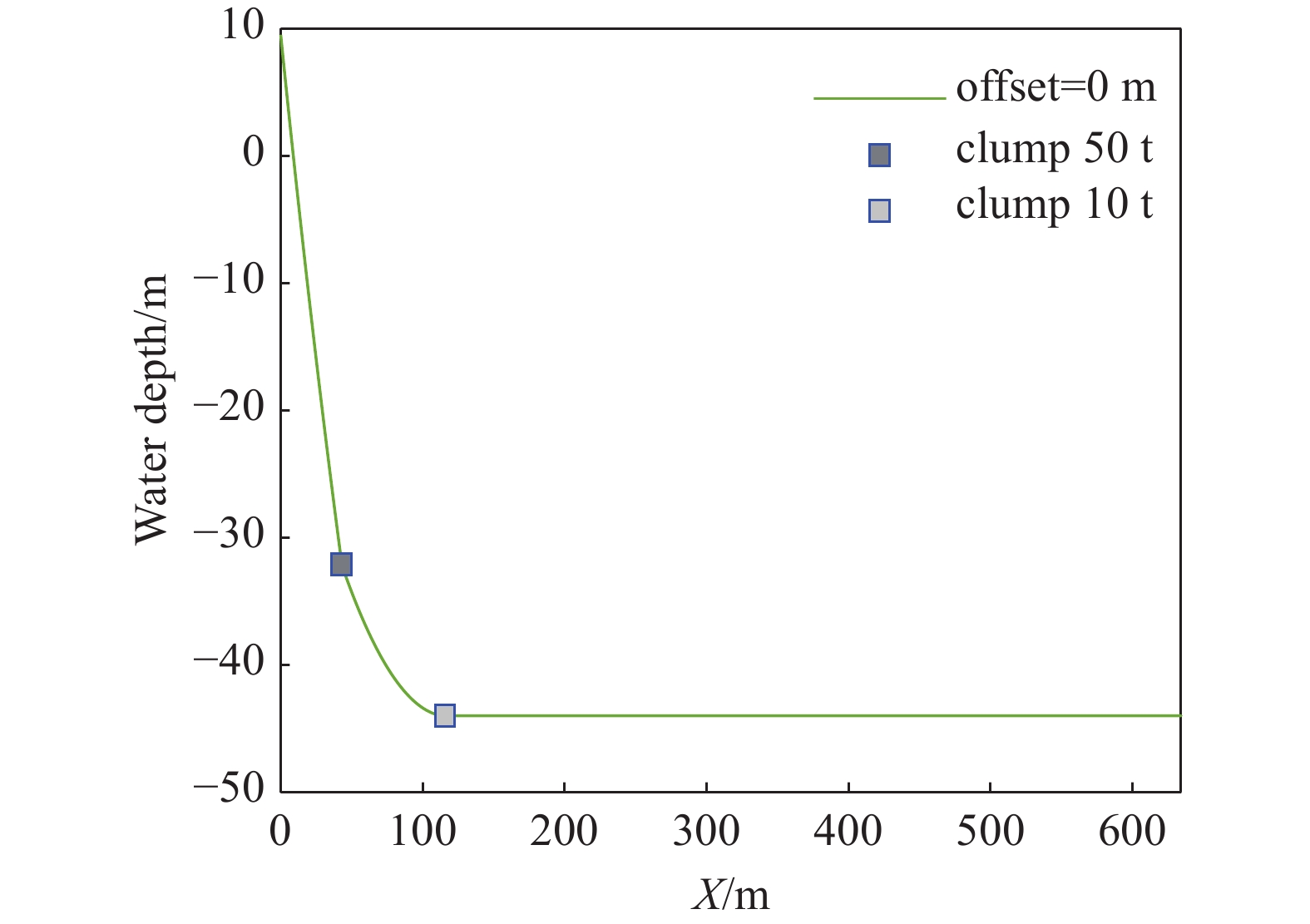
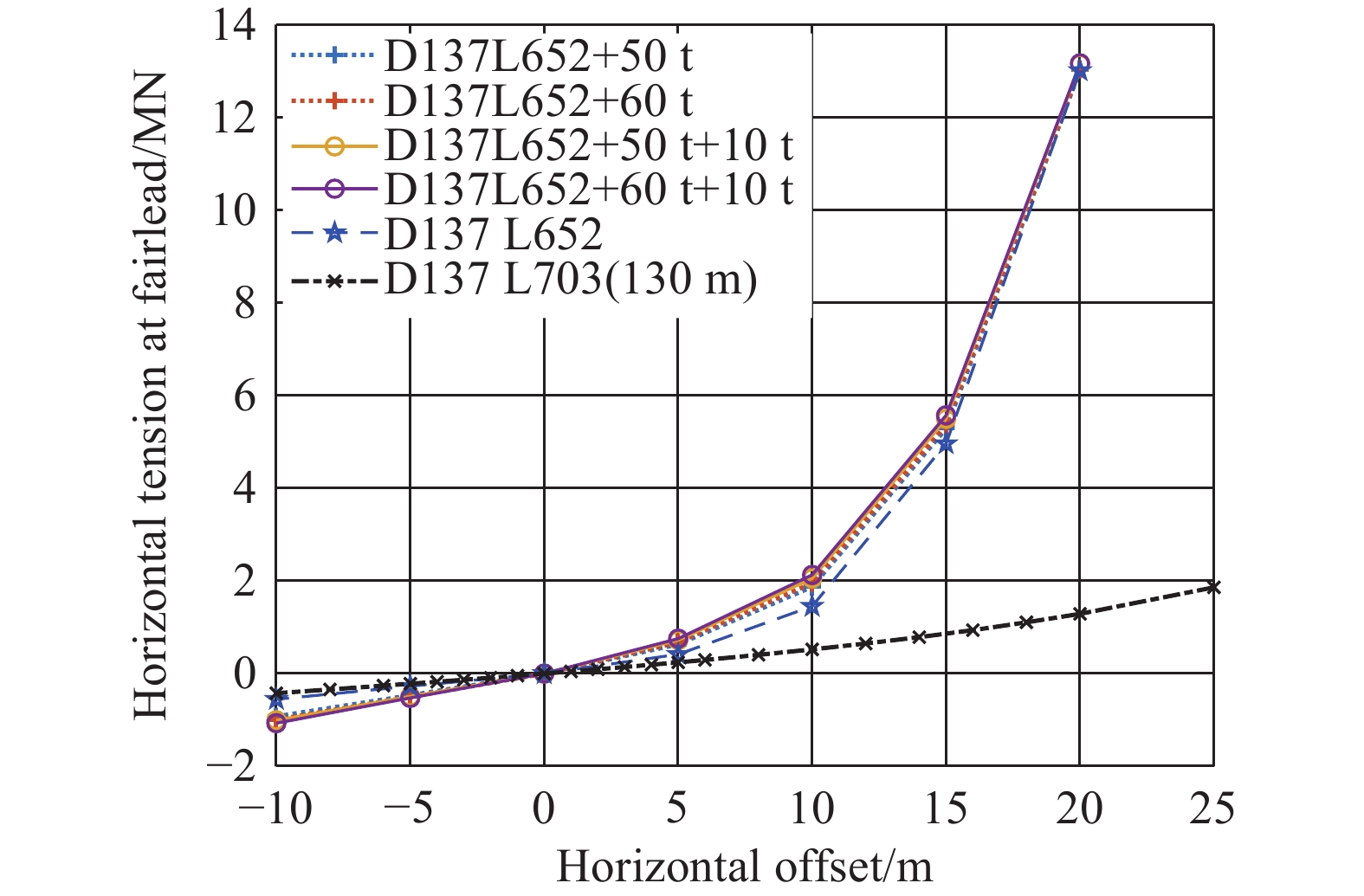
针对广东40~50 m的近海深水区,基于“刚度相似”准则,根据原始130 m水深母型系泊[21]设计出了适用于该近海深水区的浮式风力机系泊系统。该浅水系泊系统设有3根锚链,每根锚链之间的夹角为120°(如图4所示)。锚链直径为137 mm,长度为652 m。沿锚链长度方向距离导缆孔60 m处设置一个50 t配重块,然后在距离导缆孔134 m处,即锚链与海底的切点位置再增加一个10 t的配重,锚链破断张力为1.6992E+07 N,如图5所示。原型130 m水深的锚链系泊刚度和针对40~50 m的近海深水区改造后的锚链系泊刚度在纵荡方向的对比如图6所示,表明水深变浅后,系泊刚度的非线性特性大大增强。在平台大范围偏移下,将产生较大的系泊张力,容易引起系泊破断风险[23]。
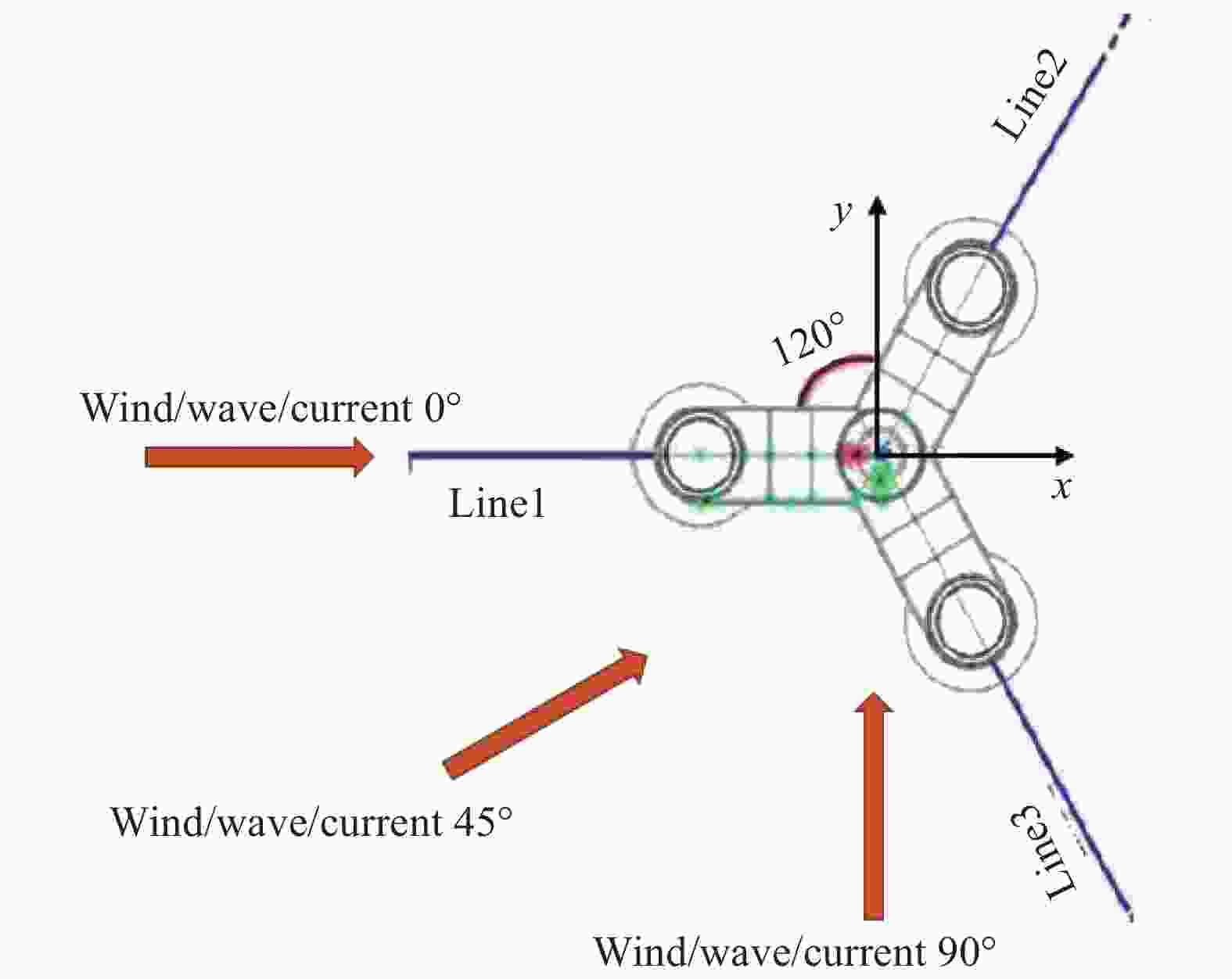
Figure 4. Layout of mooring lines
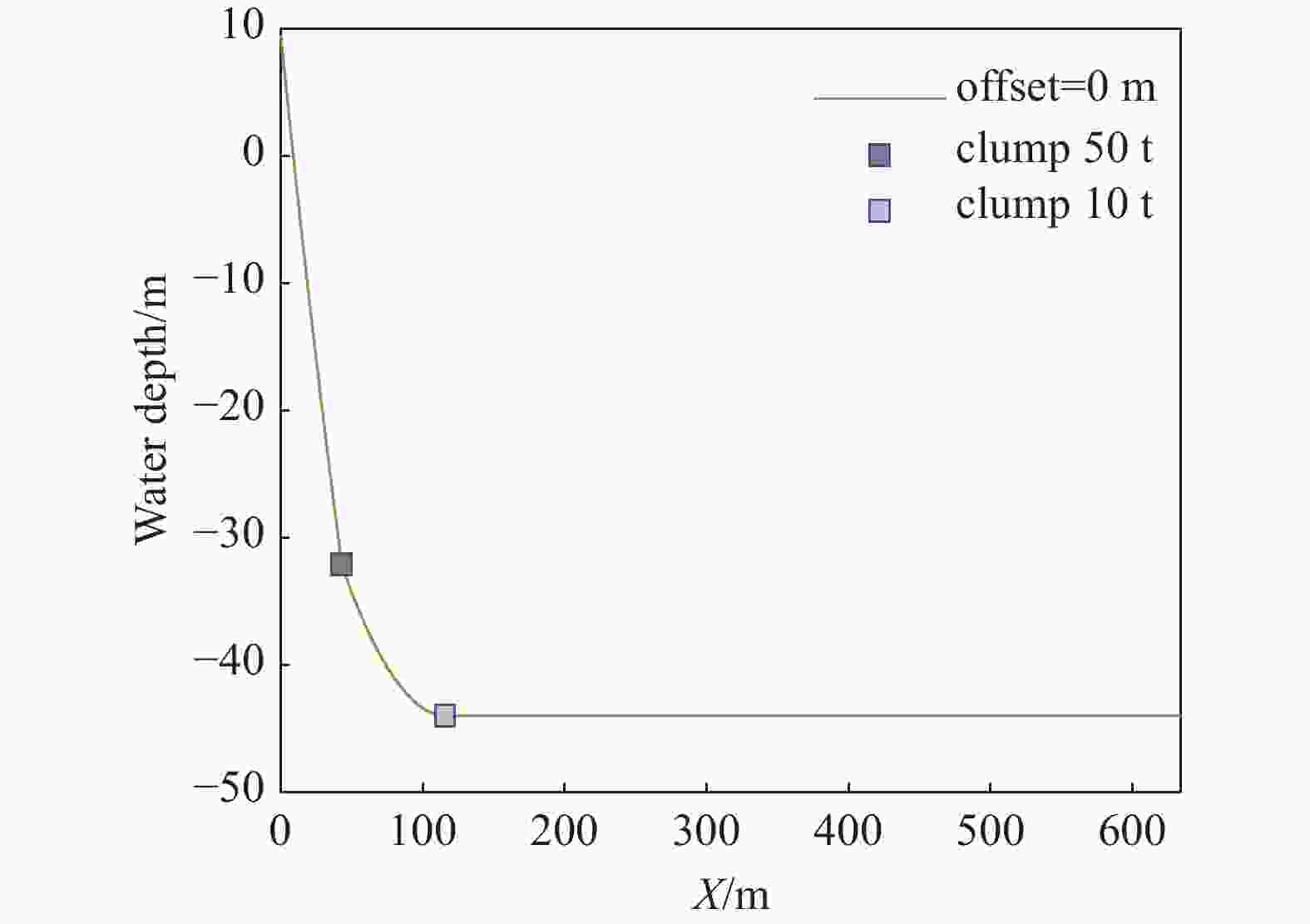
Figure 5. Arrangement of the counter weight in a line
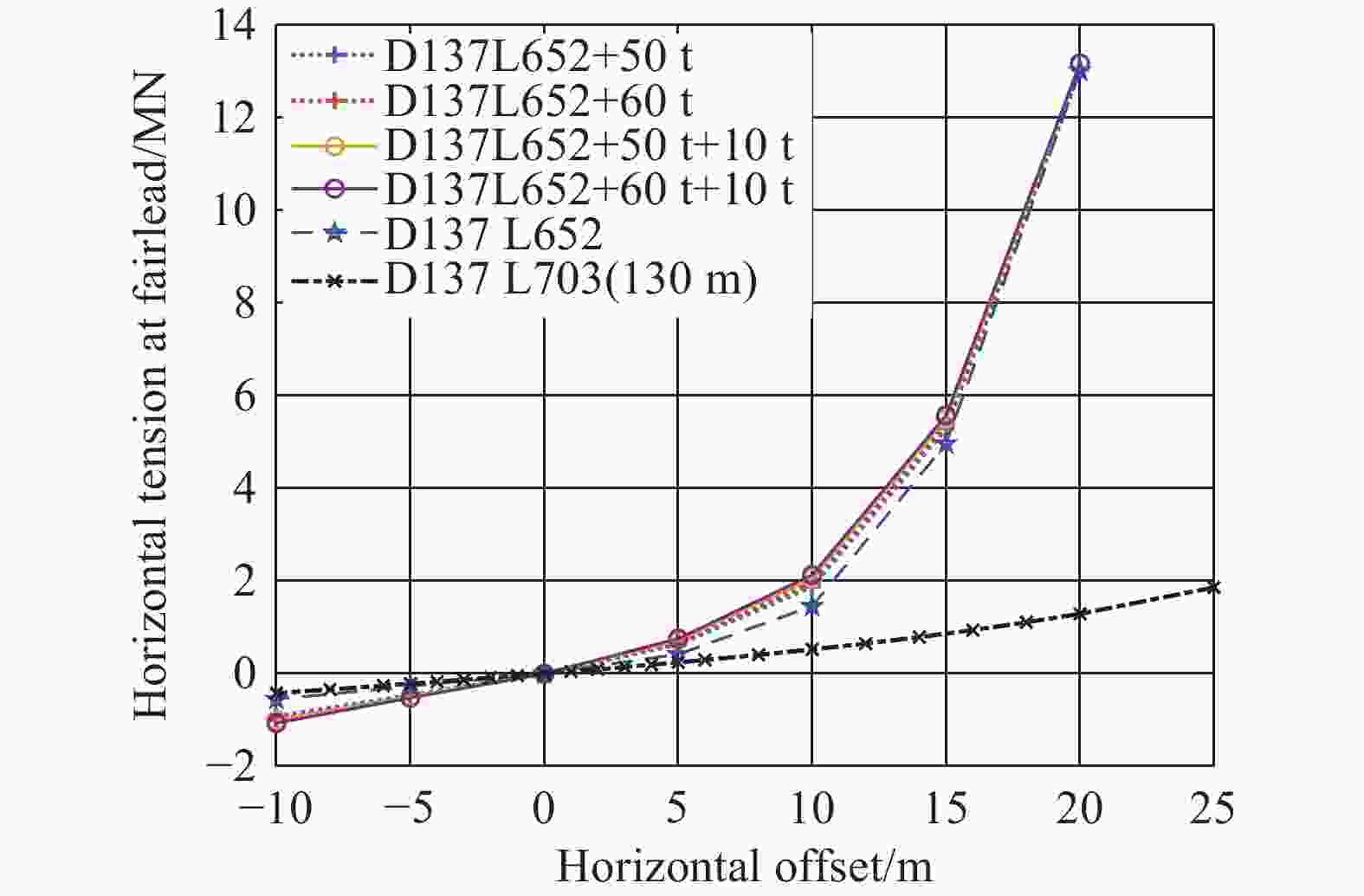
Figure 6. Contrast curves of mooring stiffness in surge offset
-
为了更加准确地考虑漂浮式风机不同荷载和基础运动之间的耦合关系,文章采用一体化的海上漂浮式风机数值模型。一体化计算程序需要将风轮气动荷载、结构动态响应、基础平台受到的波浪和海流的水动力荷载、锚泊系统约束张力和控制系统作用力统一到一个数值模型中,并且尽可能地在同一个动力学方程中同时求解各个自由度的信息,从而尽可能地获得准确的计算结果。
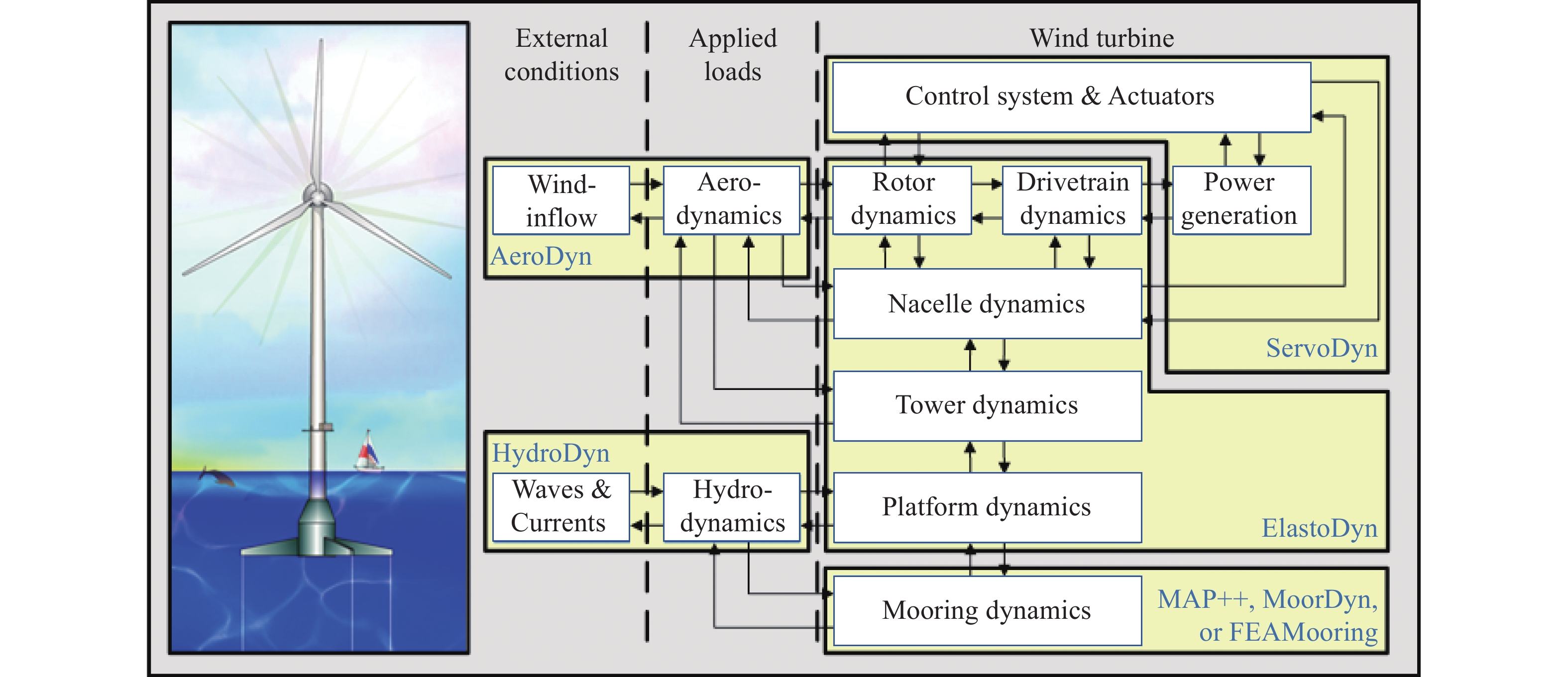
本计算采用FAST(Fatigue, Aerodynamics, Structures and Turbulence)[10]软件进行上述的漂浮式风机一体化数值计算。该软件由美国可再生能源实验室(NREL)开发,是一款包含空气动力学、水动力学、柔性多体动力学以及机电控制系统为一体的,用于2~3桨叶水平轴风力发电机的载荷计算工具。软件综合了气动力模块、结构动力分析模块、水动力分析模块和控制器模块,可以执行整个浮式风机的气动-水动力-伺服-弹性耦合的时域耦合数值分析,软件各个功能模块的计算逻辑如图7所示。该软件气动荷载的计算主要采用BEM方法或GDW方法,水动力荷载采用势流方法求解大型结构体的水动力,并辅助以Morison方程修正细长体水动力荷载,结构动力学采用kane动力学方程,系泊模型包含悬链线、集中质量法和有限元模型等。
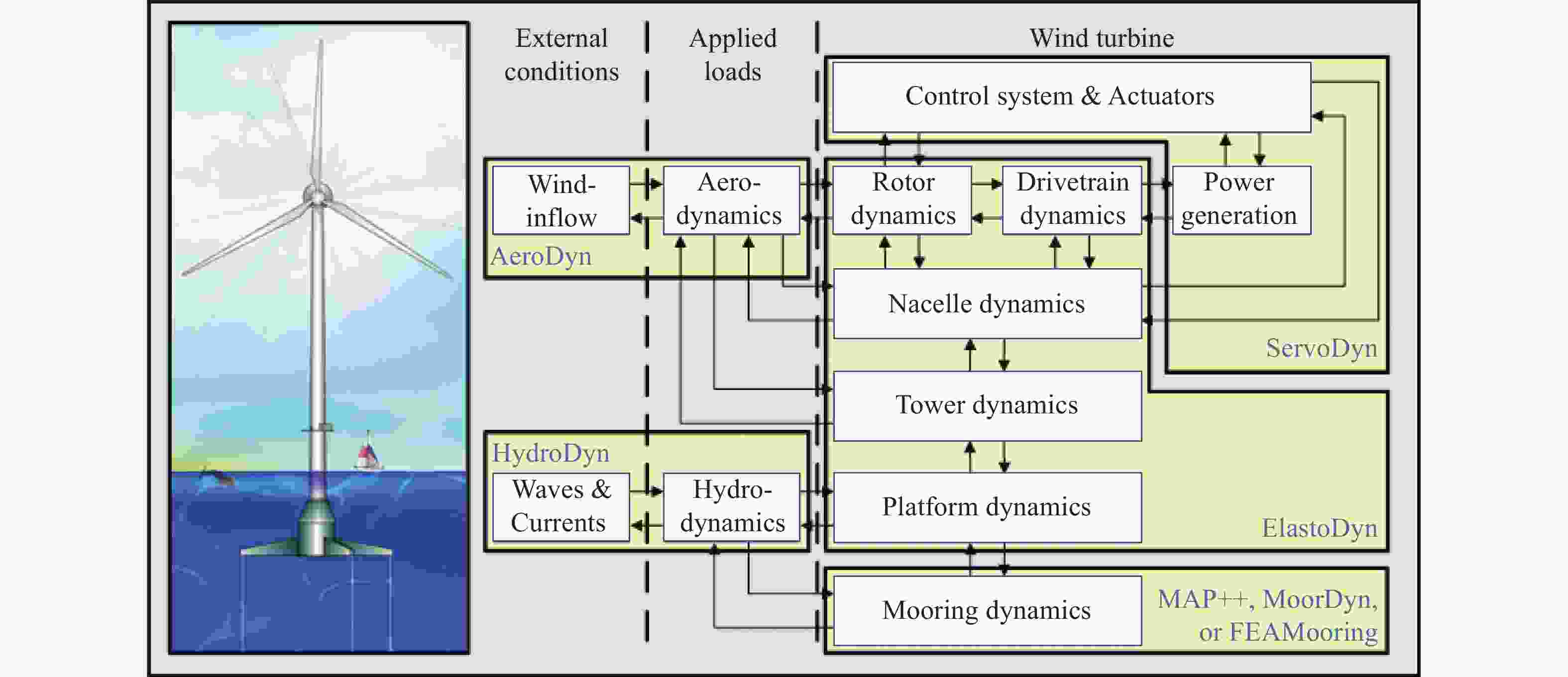
Figure 7. Modules of FAST software[7]
-
结合广东省近海水深区某海上风电场水文气象数据,该海域平均海平面为44 m,本研究数值模拟选取2种计算工况,分别为额定作业工况(轮毂处10 min平均风速为11.4 m/s)以及生存工况(50年一遇,轮毂处10 min平均风速为56.2 m/s)。每种工况对应的环境参数如表3所示。针对每种工况分别选取5个随机种子,模拟随机环境载荷,每个随机种子下模拟1 h,针对每种工况分别选取了3种环境载荷入射方向分别为0°、90°和45°。波浪采用随机波由三参数Jonswap谱定义,海流取为均匀流。
名称 编号 方向/(°) 风 浪 流 轮毂处风速/(m·s−1) 风切变指数 有义波高/m 谱峰周期/s 谱峰因子 流速/(m·s−1) 发电工况 DLC 1a 0 11.4 0.067 1.75 7.5 3.3 0.46 DLC 1b 90 11.4 0.067 1.75 7.5 3.3 0.46 DLC 1c 45 11.4 0.067 1.75 7.5 3.3 0.46 生存工况 DLC 3a 0 56.2 0.096 11.53 14.93 3.3 1.19 DLC 3b 90 56.2 0.096 11.53 14.93 3.3 1.19 DLC 3c 45 56.2 0.096 11.53 14.93 3.3 1.19 Table 3. Load cases and environmental parameters
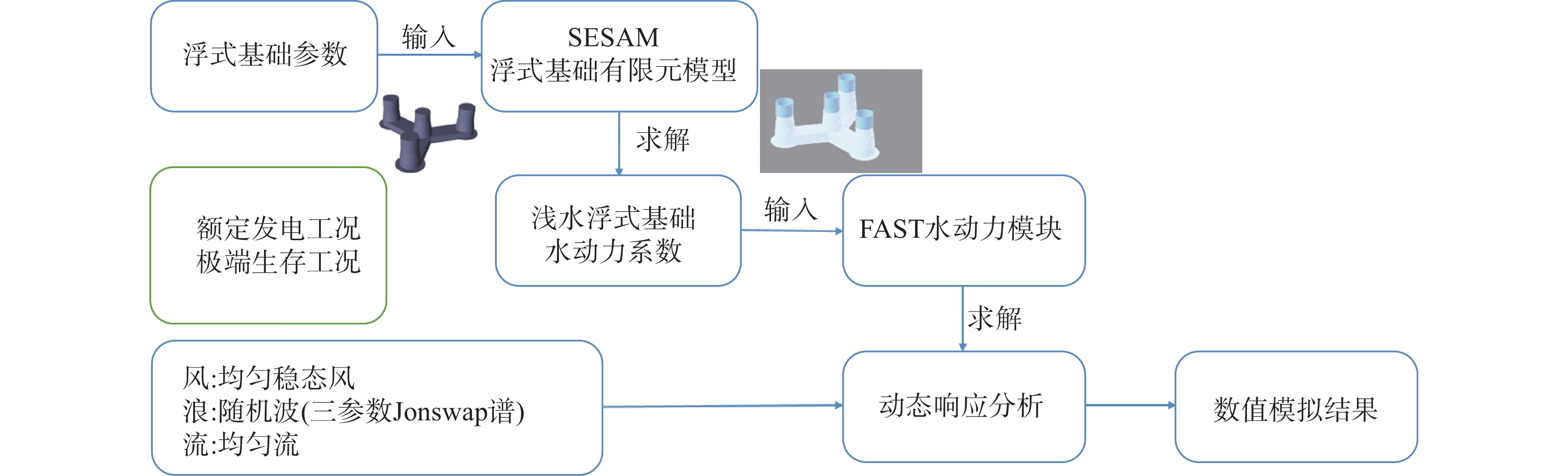
文章根据上述10 MW半潜型浮式风力机的相关参数建立浮式风力机数值模型。利用SESAM软件[24]建立浮式基础的有限元模型,并求解浮式基础水动力系数,计算结果作为FAST软件水动力模块的输入文件,其气动计算、系泊计算、结构动力计算和风机控制算法均在FAST软件实现,按照设定的环境工况,进行数值模拟,最后对计算结果进行统计分析,计算流程如图8所示。
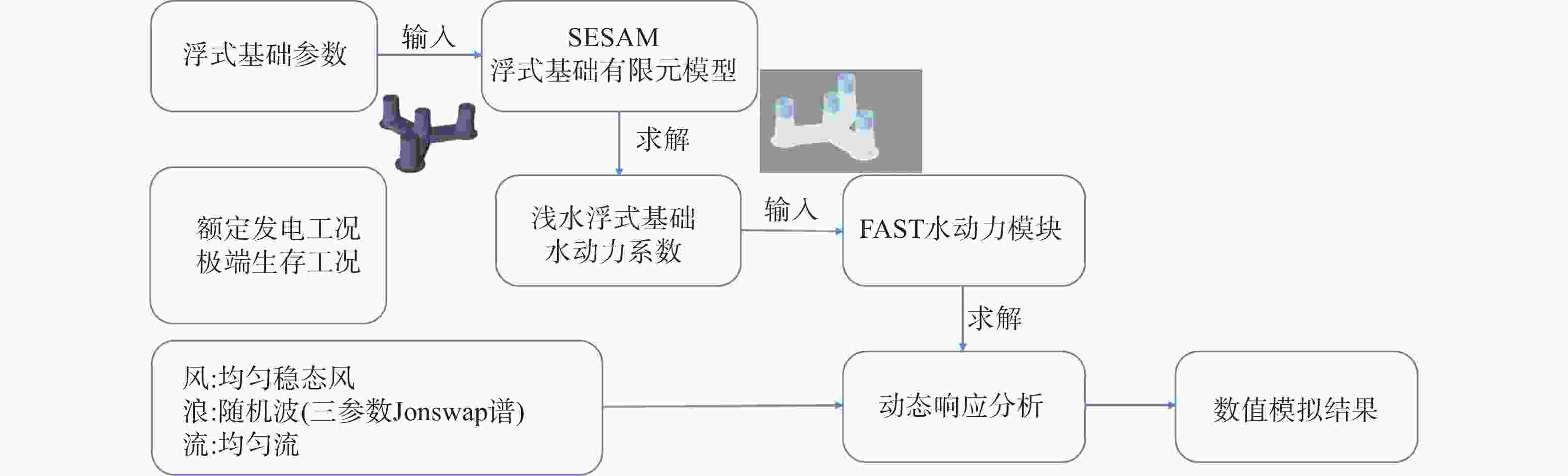
Figure 8. Flow of integrated computing of floating wind turbines
-
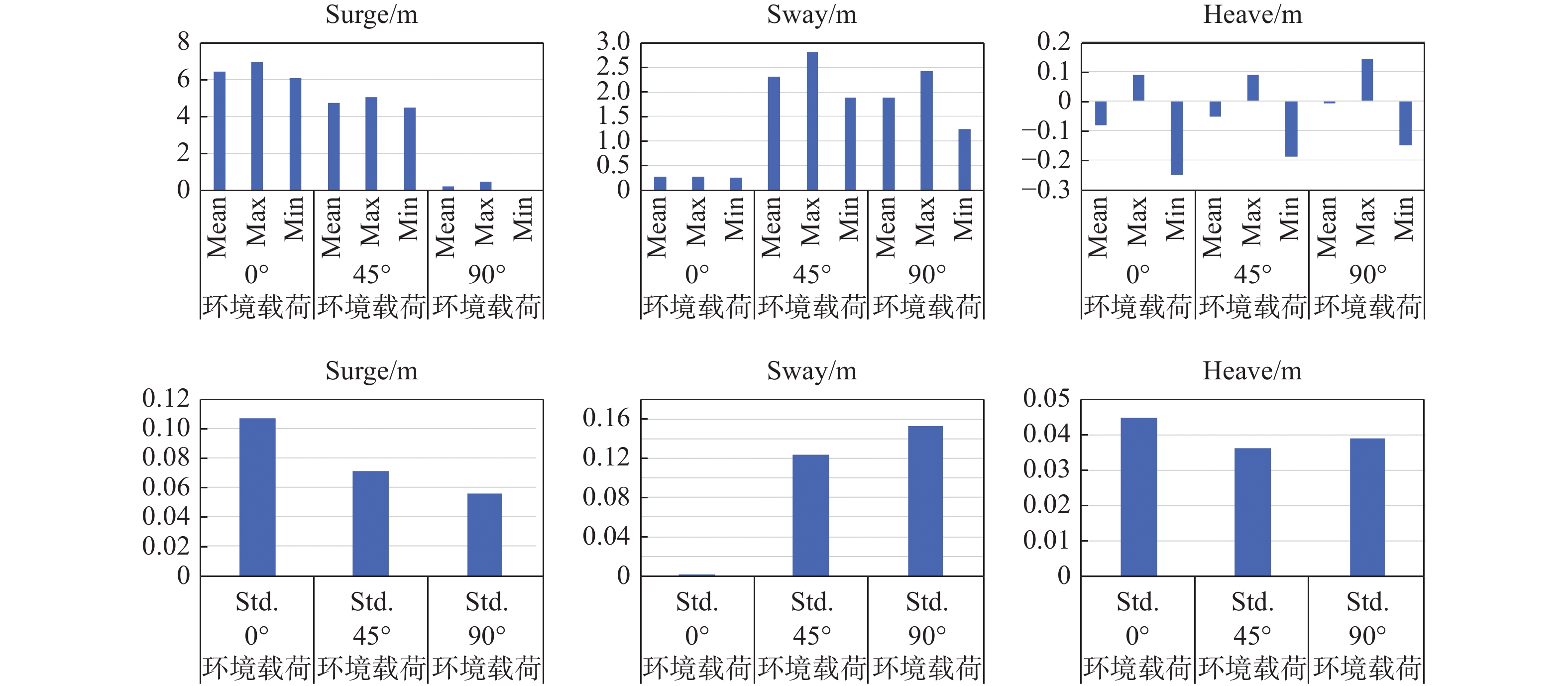
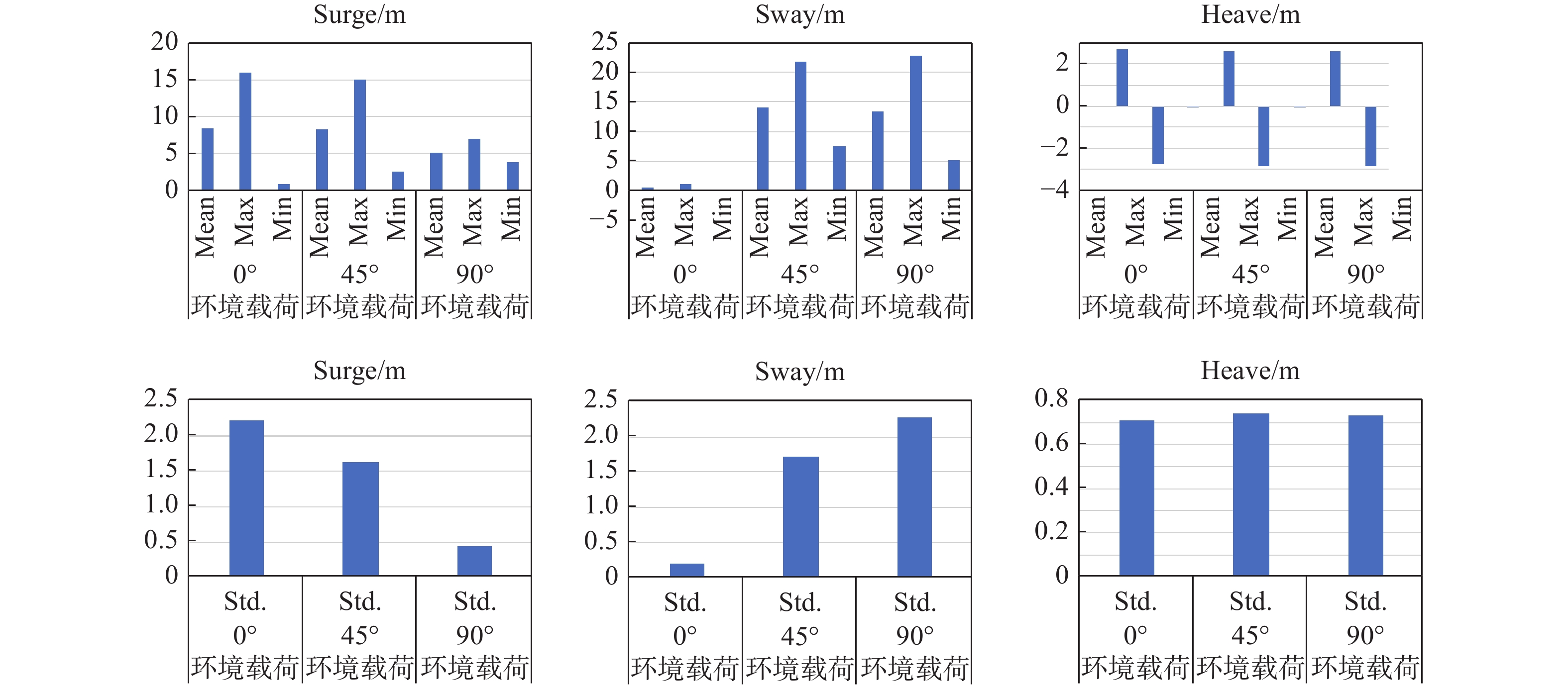
当漂浮式风机处于额定工况时,计算结果统计如图9、图10和图11所示,当环境载荷入射方向为0°时,纵荡的均值、极值和标准差都是最大的,随着环境入射方向的改变,纵荡的响应值逐渐减小。在发电工况下纵荡运动的最大值为6.933 m,纵荡运动的最大值小于水深的一半,满足设计要求,可以保证风力机正常发电;横荡运动的响应趋势与纵荡运动相反,当风机无偏航对风下,环境载荷入射方向为45°时,横荡响应均值最大,0°时横荡响应均值最小。横荡运动的最大值仅为2.815 m。对比横荡运动的标准差可以发现,环境载荷为90°时横荡运动的标准差最大,这主要是因为浮式基础的动态响应主要受波浪载荷影响,当环境载荷入射方向为90°时,浮式基础受到的横向波浪载荷最大;垂荡运动均值在环境载荷入射方向为0°时最大,但是垂荡运动的标准差随着环境载荷方向的改变变化不大。由于浮式基础运动的均值主要由气动载荷决定,而其运动的标准差主要由波浪载荷决定。因此可以发现,不同入射方向的波浪力对垂荡运动的影响几乎一致,但是不同方向的气动载荷差别较大。同时由于垂荡运动与纵荡运动之间的耦合作用,可以发现,当波浪载荷入射方向为0°时,垂荡运动的标准差最大。因此对于垂荡运动而言,0°环境载荷入射方向的响应最大。
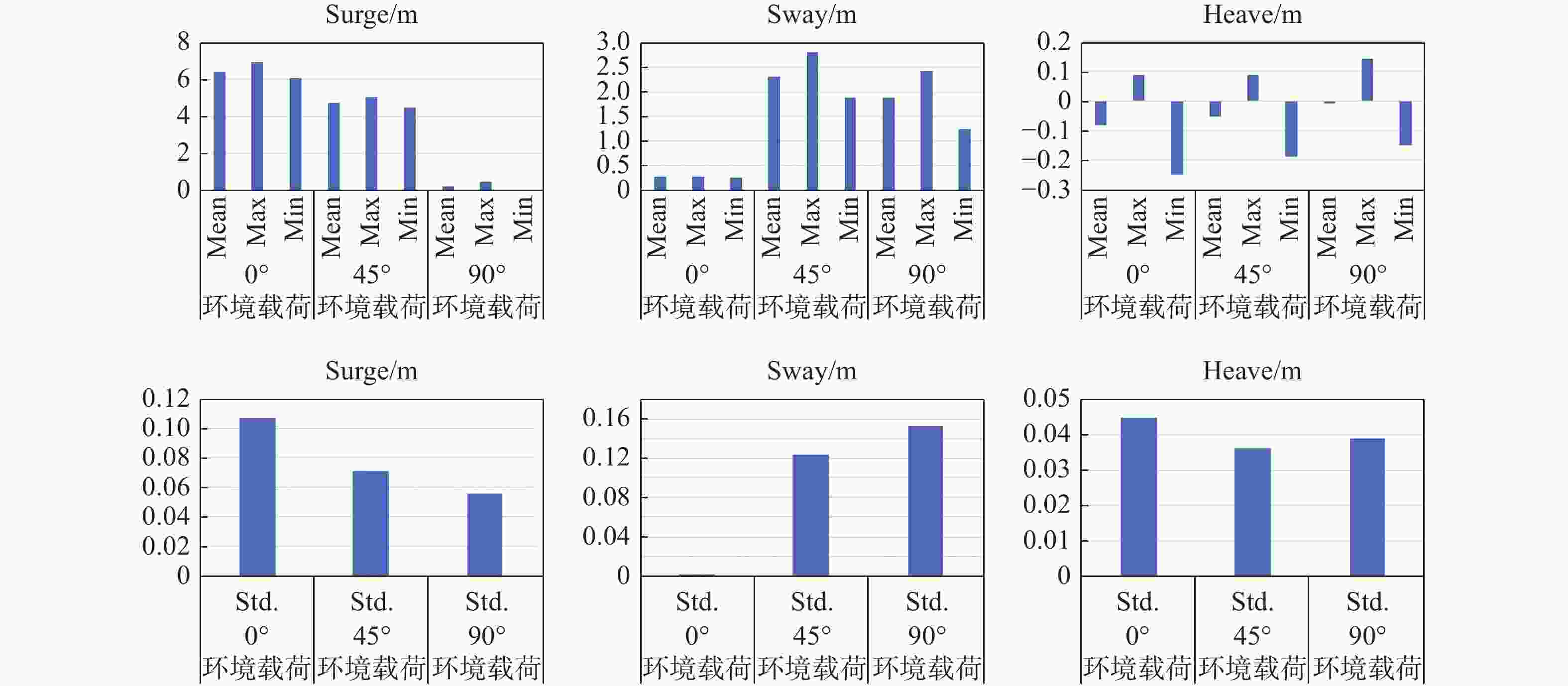
Figure 9. Statistics of surge, sway, heave motion under the rated-condition
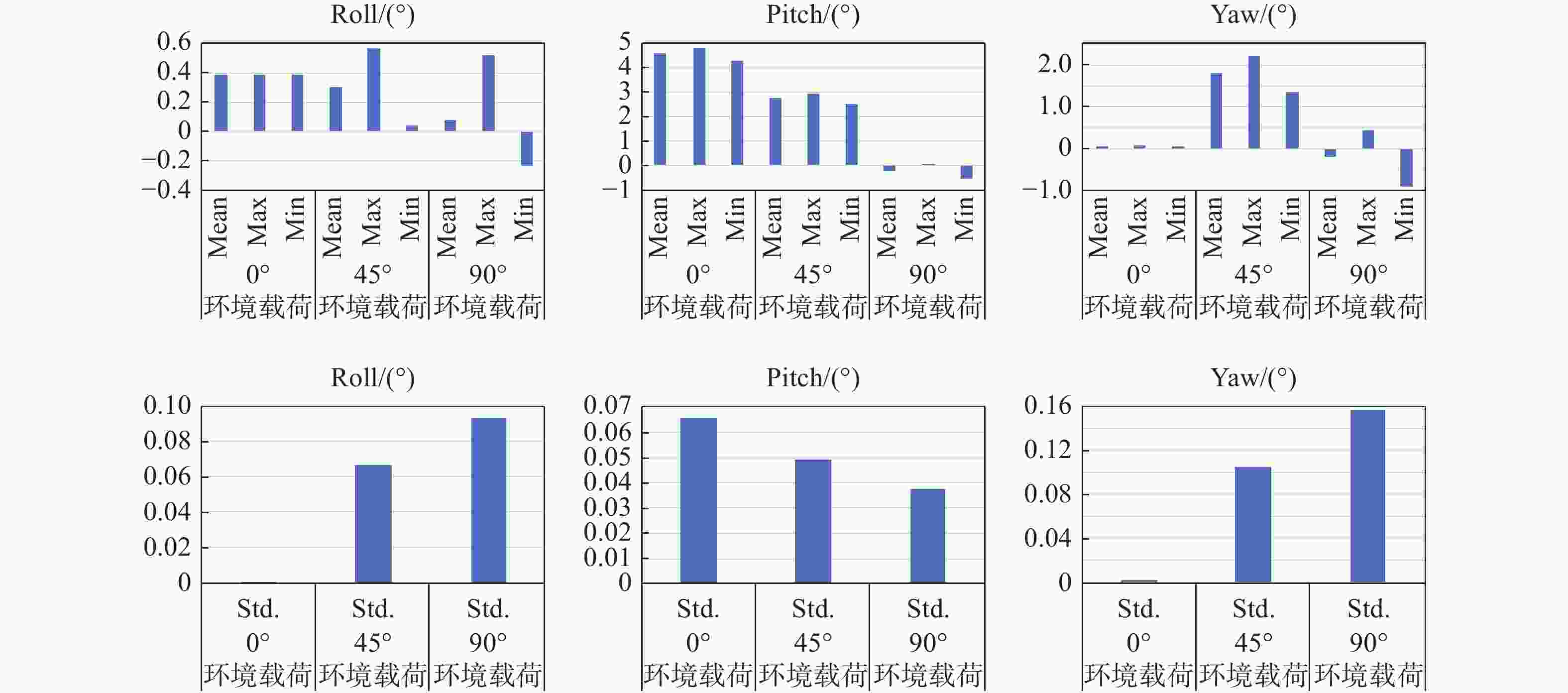
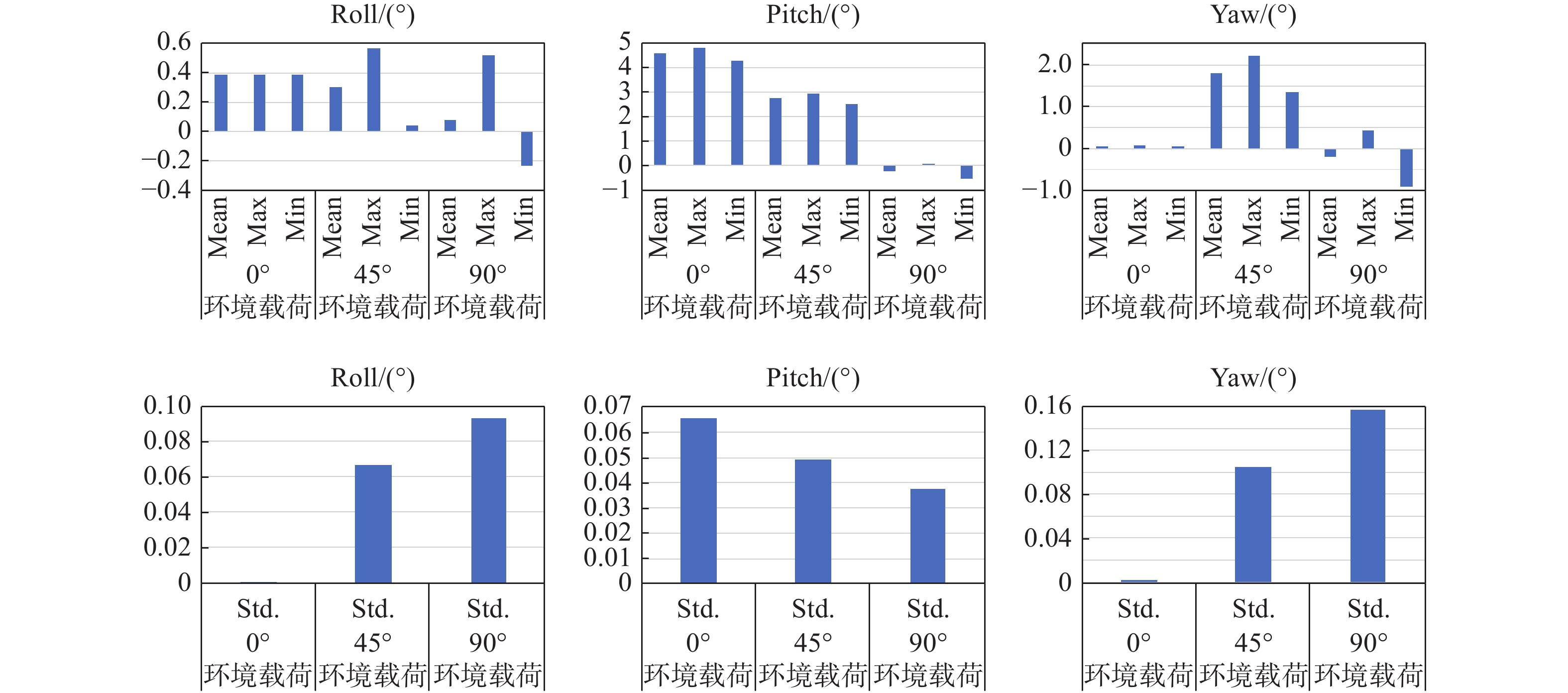
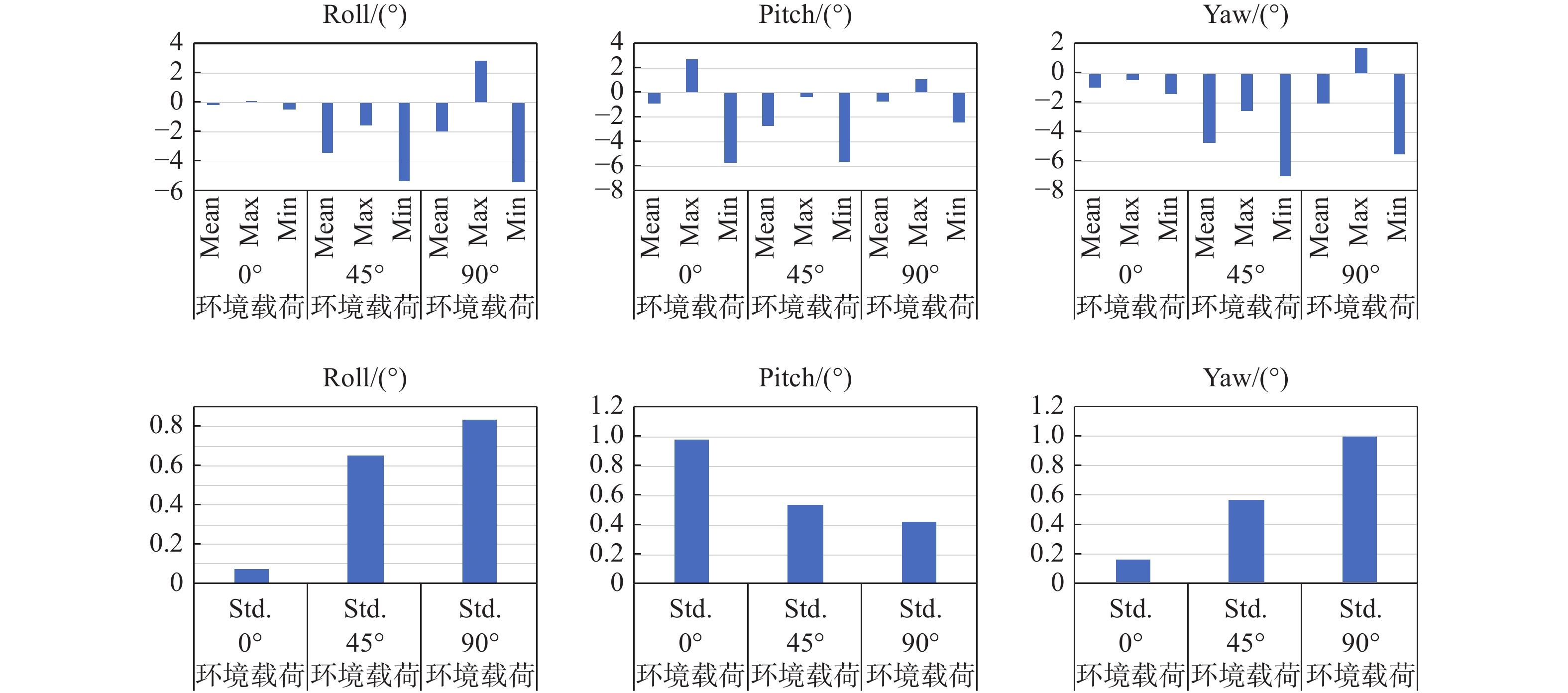
Figure 10. Statistics of roll, pitch, yaw motion under the rated-condition
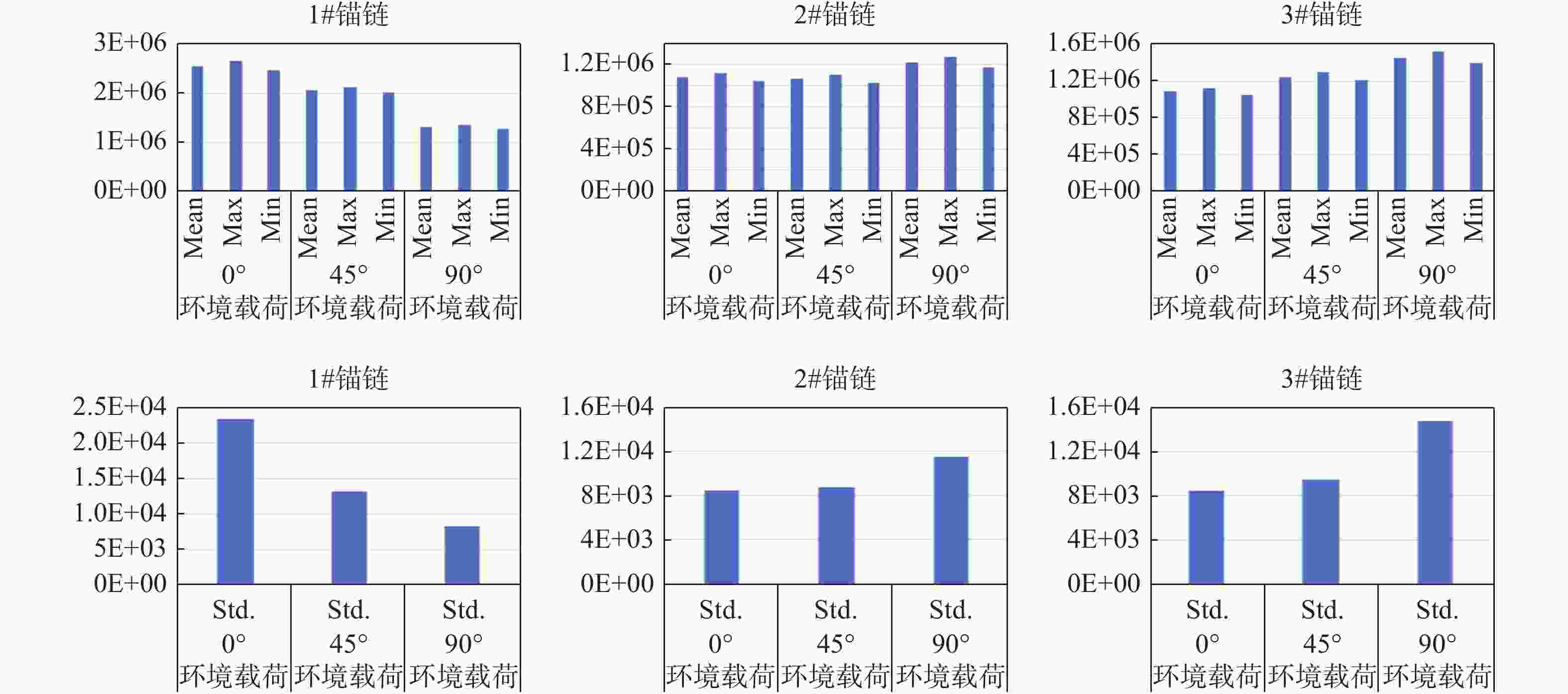
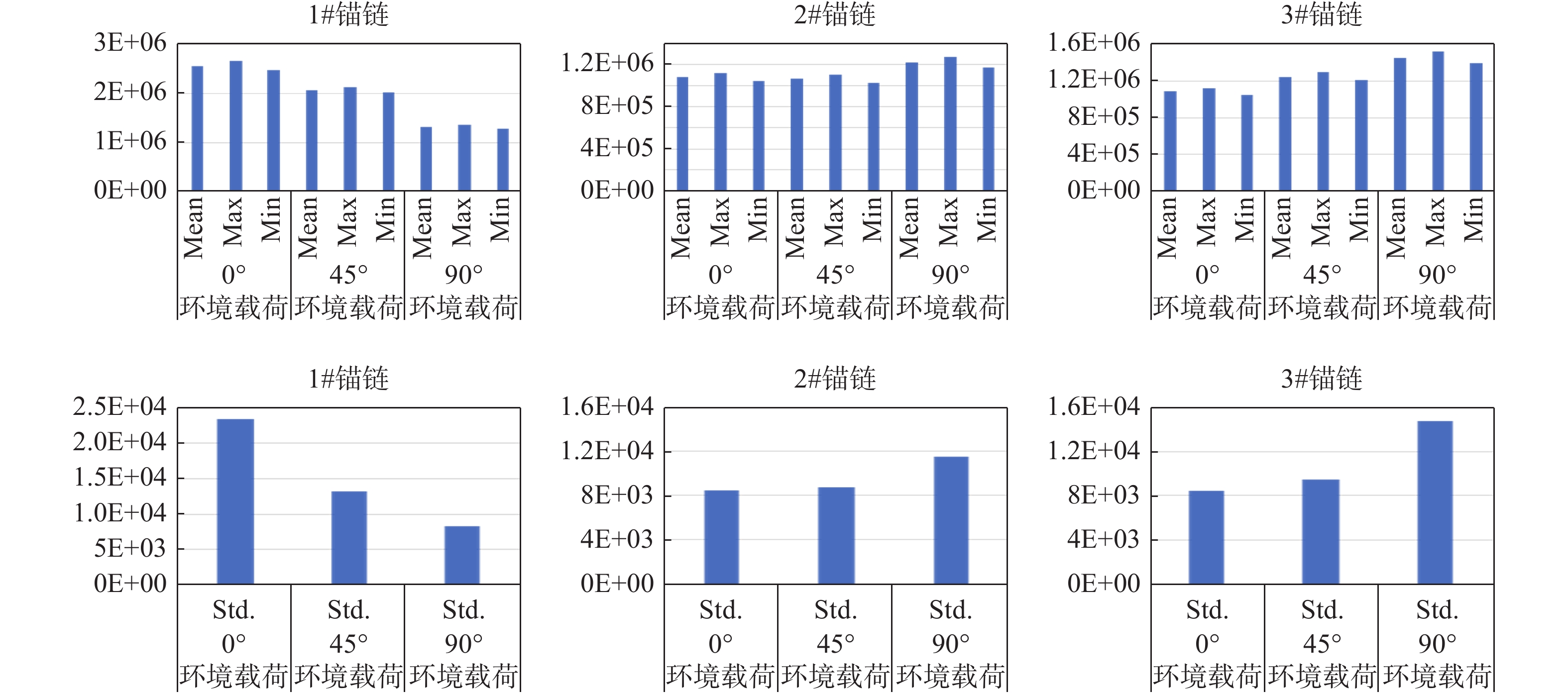
Figure 11. Statistics of mooring-line tension under the rated-condition
从图10的计算结果可以看出,当风机无实时偏航对风下,横摇运动的响应较小,最大横摇仅有0.567°,出现在环境载荷入射方向为45°的工况。横摇运动的标准差变化趋势与横荡运动相同,即0°环境入射方向时最小,90°环境入射方向时最大,最大横摇标准差为0.093°。当环境载荷的入射方向为0°时,纵摇运动响应最大,整个模拟过程中纵摇运动的最大值4.838°,满足设计限定要求。随着环境方向的改变,纵摇运动的响应逐渐减小。当环境载荷入射方向为45°时,首摇运动的均值和极值都比较大,当环境载荷入射方向为0°时,首摇运动的均值和极值较小。从标准差的统计结果来看,当环境载荷入射方向为90°时,首摇运动的标准差最大,0°时最小,这与横摇和横荡的响应相一致。
额定作业工况下的锚链的张力统计如图11所示,可以看出,锚链的最大张力为2.669E+06 N,出现在环境载荷入射方向为0°时的1#锚链中。此时1#锚链的张力要明显大于另外两根系泊锚链。当环境载荷入射方向为45°时,依旧是1#锚链的张力最大,但是与0°工况相比,1#锚链的张力有所减小,2#和3#锚链的张力有所增大。当环境载荷入射方向为90°时,3#锚链的张力要大于另外两根锚链,但是3根锚链张力都不是很大,此时锚链最大张力仅为1.516E+06 N,远小于锚链破断张力1.699 2E+07 N,满足规范要求。
-
在生存工况下,风机顺桨停机,漂浮式风机主要受波浪荷载影响。如图12所示,纵荡运动的最大值为15.960 m,出现在0°入射方向,纵荡运动的最大值小于水深的一半,满足设计要求。纵荡的均值和标准差都是在0°入射方向最大,90°入射方向最小;横荡运动的响应与纵荡运动相反,0°入射方向最小为0.525 m,45°环境载荷条件下横荡运动的均值为14.018 m,最大值发生在90°入射方向,最大横荡运动为22.81 m。横荡运动的标准差随着环境载荷方向的改变而增大,90°入射方向最大标准差为2.282 m;垂荡运动的均值和标准差随着环境载荷方向的改变变化不大,均小于1 m。垂荡运动的最大值为2.697 m,最小值为−2.840 m,分别出现在0°和45°入射方向。
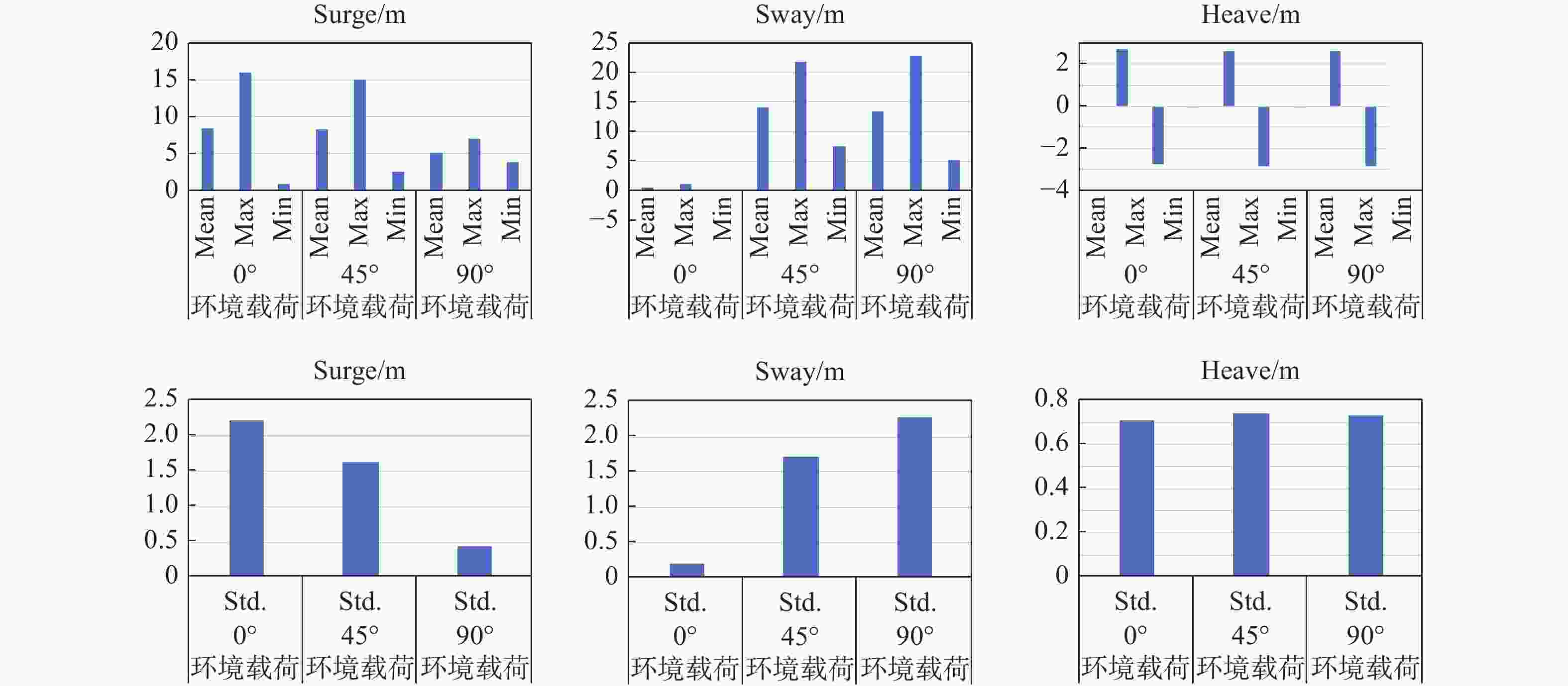
Figure 12. Statistics of surge, sway, heave motion under the survival-condition
图13表明横摇运动响应规律与横荡运动相似,横摇运动的均值在0°环境载荷下最大为−0.192°,在45°环境载荷下最小为−3.402°,相比于额定发电工况和切出风速工况,生存工况下的横摇运动幅度有所增加。横摇运动的标准差在0°时最小,在90°时最大,最大横摇标准差为0.834°。横摇运动的最大值和最小值均出现在环境载荷入射方向为90°时,最大值为2.836°,最小值为−5.447°;纵摇运动的均值在45°环境载荷作用下最小为−2.727°,在90°环境载荷作用下最大为−0.722°。纵摇运动的最大值和最小值均出现在0°入射方向,最大值为2.748°,最小值为−5.740°。生存工况下纵摇运动未超过10°,满足相关要求。纵摇运动的标准差随着环境载荷方向的改变而减小,0°环境载荷方向最大;与额定发电工况和切出风速工况相比,45°和90°环境载荷作用下的首摇运动响应明显增大。首摇运动在0°入射方向下均值最大为−0.982°,在45°入射方向均值最小为−4.736°。首摇运动的最大值和最小值均出现在90°环境载荷方向,分别为1.739°和−5.493°。首摇运动的标准差随着环境方向的改变而增大,最大首摇标准差出现在90°环境载荷下为0.996°。
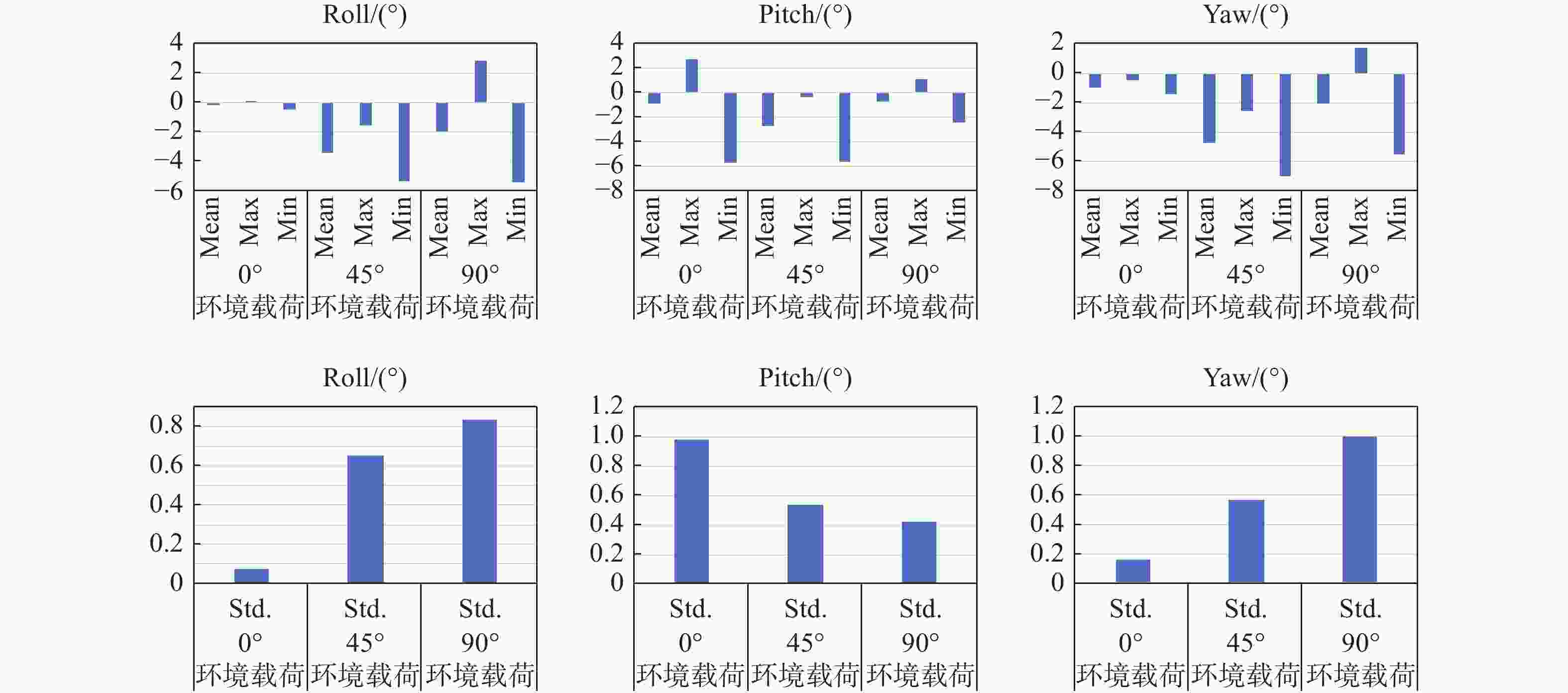
Figure 13. Statistics of roll, pitch, yaw motion under the survival-condition
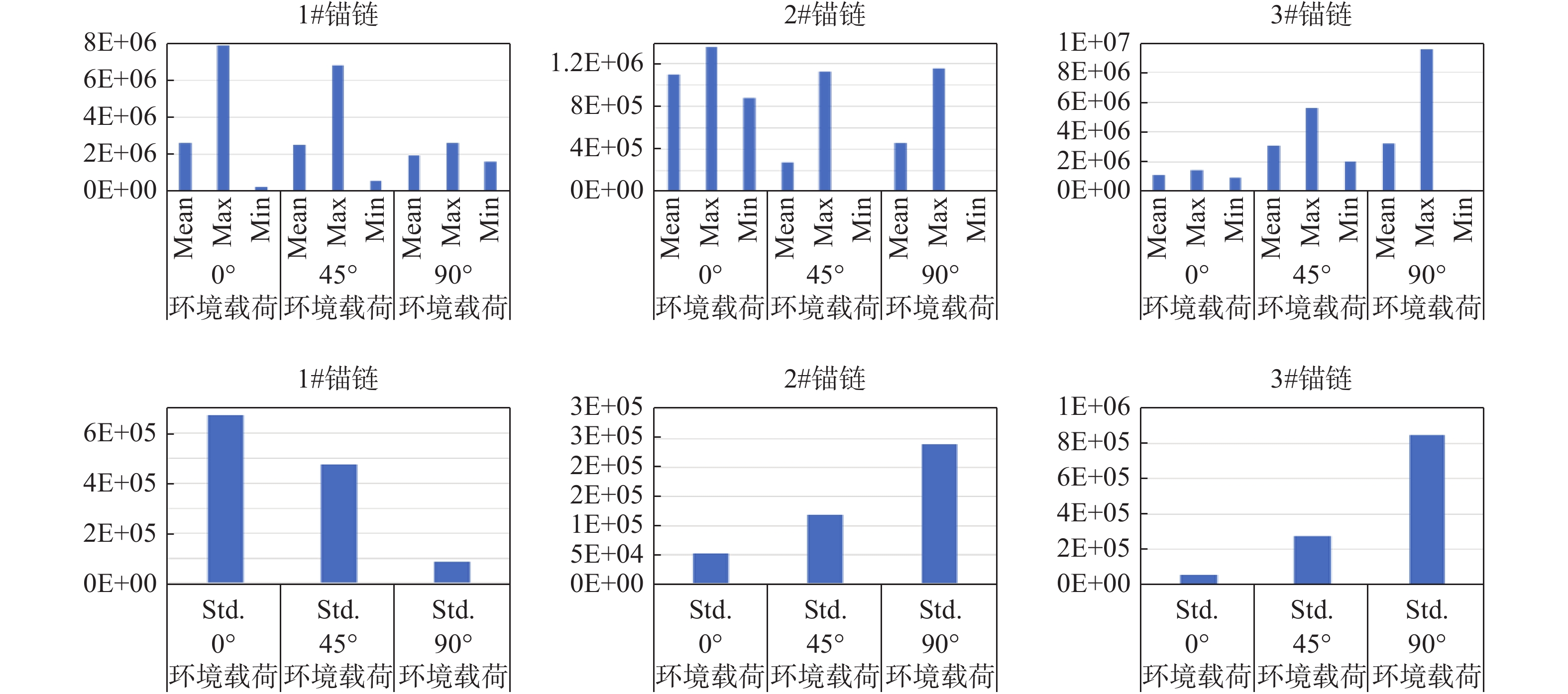
根据锚链的张力统计结果图14看出,生存工况下锚链的最大张力为9.539E+06N,出现在90°环境载荷作用下的3#锚链中。根据DNV-OS-J301规范[25]要求,锚链的特征张力($ {T_{\mathrm{d}}{\mathrm{}}} = {T_{{\mathrm{C,mean}}}}{\gamma _{{\mathrm{mean}}}} + {T_{{\mathrm{C,dyn}}}}{\gamma _{{\mathrm{dyn}}}} $,其中$ {\gamma _{{\mathrm{mean}}}} = 1.3 $,$ {\gamma _{{\mathrm{dyn}}}} = 1.75 $)要求小于破断张力。根据文章计算结果可以计算得到90°环境载荷条件下锚链的特征张力为1.524E+07 N,小于锚链破断张力1.6992E+07 N,满足规范要求。在生存工况下,当环境载荷入射方向为0°时,1#锚链的张力均值、最大值以及标准差要明显大于另外两根锚链,0°入射方向下锚链的最大张力为7.876E+06 N,这与额定工况的结果相一致;随着环境载荷方向的改变,3#锚链的张力均值和标准差增大,1#锚链的张力均值和标准差减小,2#锚链的均值减小但是标准差增大。此时3#锚链的均值最大为3.086E+06 N。但是锚链的最大瞬时张力出现在1#锚链中,为6.798E+06 N;当环境载荷入射方向为90°时,3#锚链的张力均值和标准差明显大于1#和2#锚链,3#锚链的张力均值为3.222E+06 N,标准差为8.498E+05 N。锚链张力的最大值出现在3#锚链中,为9.539E+06 N,这也是所有模拟工况中的张力最大值。
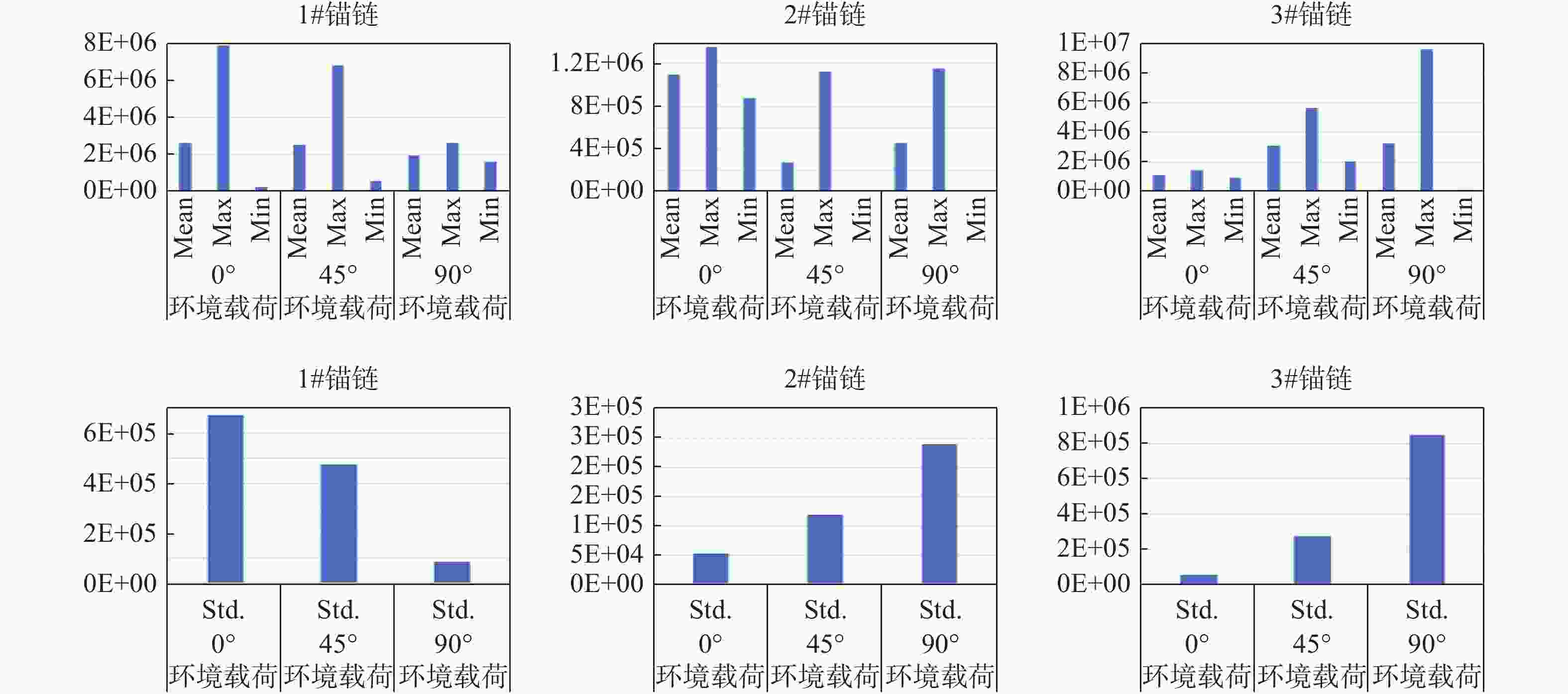
Figure 14. Statistics of mooring-line tension under the survival-condition
-
本研究结合广东近海深水区某实际海上风电项目的水文气象信息,开展10 MW级混凝土半潜式浮式风机一体化计算与耦合动力特性分析,采用一体化计算软件FAST分别选取额定发电工况和极端生存工况进行数值模拟,数值模拟的结果进行统计和分析可以得到以下的结论:
1)除了生存工况90°环境载荷入射方向的工况外,在其他所有的计算工况下,浮式基础的纵荡和横荡运动均小于水深的一半,即22 m。在极端生存工况90°环境载荷入射方向下,纵荡的最大值为6.981 m,横荡的最大值为22.810 m,与水深一半十分接近,未来需要进一步优化系泊系统,提升该方向的系泊刚度。
2)额定发电工况下纵摇运动的最大值为4.838°,横摇运动的最大值为0.567°,均小于5°;生存工况下纵摇运动的最大幅值为−5.740°,横摇运动的最大幅值为−5.447°,其绝对值均小于10°,满足风电机组最大倾角的限制值要求。
3)在所有计算工况中,锚链的张力最大值为9.539E+06 N,出现在90°环境载荷作用下的3#锚链中。根据DNV-OS-J301规范要求,计算锚链的特征张力为1.524E+07 N,小于锚链破断张力,满足规范要求。
通过文章的研究,介绍了浮式风机的一体化数值计算方法,分析了10 MW级半潜型浮式风机在我国近海水深区的动力响应特性,验证了一体化计算方法以及设计的系泊系统的有效性,为后续的工程设计和建设提供了技术参考。
Integrated Calculation and Coupled Dynamic Analysis of a Concrete Semi-Submersible Floating Wind Turbine in Offshore Deep Water Area
doi: 10.16516/j.ceec.2024.2.03
- Received Date: 2023-06-05
- Accepted Date: 2023-06-26
- Rev Recd Date: 2023-06-21
- Available Online: 2023-07-18
- Publish Date: 2024-03-26
-
Key words:
- offshore deep water area /
- floating offshore wind turbines /
- integrated calculation method /
- mooring lines /
- extreme response
Abstract:
| Citation: | CHEN Jiahao, GAO Yifan, YIN Ziwei, et al. Integrated calculation and coupled dynamic analysis of a concrete semi-submersible floating wind turbine in offshore deep water area [J]. Southern energy construction, 2024, 11(2): 31-41 doi: 10.16516/j.ceec.2024.2.03

|

 DownLoad:
DownLoad: