


-
古塔是中国五千年文明史的载体之一,被誉为中国古代杰出的高层建筑,矗立在我国的大江南北,有着重要的历史价值、科学价值、艺术价值和社会价值。据统计,中国现存古塔2 000多座,多为砖木结构;然而,由于自然侵蚀以及因保护或使用不当等造成的人为损坏,古塔呈现出不同程度,不同类型的病害症状,严重影响到古塔的健康状况。比如千年古塔洛阳白马寺齐云塔,曾在2年内遭到了3次雷击,损坏程度达文物保护严重损坏级。
近年来很多学者对中国古塔的三维重建及监测进行了研究。卢小平以洛阳白马寺齐云塔为对象,利用三维激光扫描技术对塔身进行了扫描,并对获取的海量点云数据进行了预处理,制作完成了齐云塔DLG线划图件及线框三维模型[1];张序以苏州虎丘塔为研究对象,获取其点云数据,并建立其三维空间几何模型[2];张荣在5.12汶川大地震后,依据三维激光扫描数据,进行计算机模拟拼合,为经目塔震损构件制定了复位方案[3];王晏民研究利用地面激光雷达技术获取和分析白居寺吉祥多门塔变形情况的方法[4]。已有的这些研究对于大型古塔立面正射影像图制作以及对其中关键问题探讨方面的内容很少,地面激光雷达及无人机技术在大型古塔立面正射影像图的应用也很少有报道。然而文物专业保护人员不仅是需要古塔本体信息(位置、形状、大小等)的提取,更多关注的是反应古塔本体病害的分布情况及损坏程度的真实纹理信息等,进而为下一步的修缮提供真实可靠的基础。
本文以杭州市保俶塔为例,利用地面激光雷达和无人机技术制作其立面正射影像图,分析了其中的关键技术和需要注意的问题,为大型古塔的立面正射影像图制作提供技术支持,推动地面激光雷达及无人机技术在文化遗产记录和保护中的深入应用。
HTML
-
保俶塔坐落于浙江省杭州市宝石山顶,包括塔基、塔身、塔刹三部分。塔基平面为八角形,分两层,均为条石垒砌。塔身平面为八角形,共七层,砖砌实心,无塔檐和平座。塔刹为铁质,刹身包括5重相轮,刹顶包括仰月、宝盖、宝珠等。
控制网建设是三维表面测量工作初期的一项重要工作[5],根据作业要求及现场情况,利用3个四等GPS监测点作为首级控制,次级平面和高程控制网分别按照城市一级导线精度指标要求和国家二等水准测量精度指标施测,并在塔周围布设25个固定反射贴片。同时按照文物保护要求,不允许埋设常规测量标志,因此,塔体附近控制点标志一律采用直径1.5 mm的钻孔,然后镶嵌铜丝。
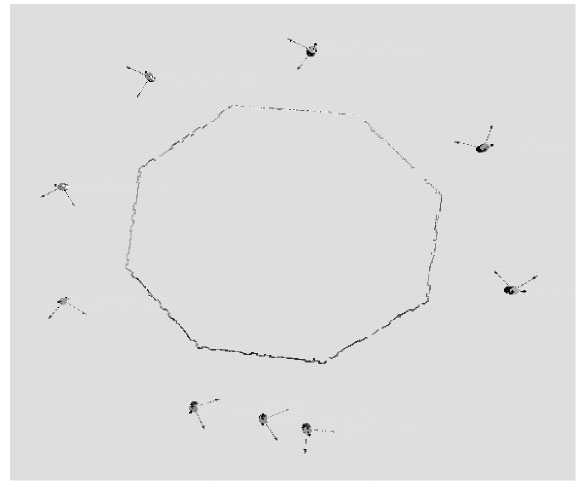
本次作业利用岳庙管理处对保俶塔安装雷电防护措施搭设脚手架的机会,对塔本体进行精细三维扫描。但是塔体周围植被茂密、空间狭小,现场脚手架搭建离塔体距离较近,为了保证数据的完整度和精度,在地面及每层脚手架上(共20层)分别至少布设8个测站,按照搭设1层,扫描1层的原则,自下到上按顺时针方向对塔体进行精细扫描,扫描分辨率设置为1 mm,相邻两站点云数据重叠率大于30%。经统计,全塔共进行了188测站的扫描工作,图1为某层扫描测站点布置图(三角符号代表每层必须固定扫描的站点,圆形符号代表可选扫描的站点)及现场扫描工作照片。

Figure 1. Arrangement of scanning station in a layer and field work
-
纹理数据获取的根本原则是尽量使制作正射影像所需的原始像素完整,没有遮挡,保证相机镜头与古塔的立面平行。在进行实地拍摄之前须对所要拍摄的立面作一个整体的划分。
由于搭设脚手架离古塔较近,若采用传统人工方式站在脚手架上拍摄纹理,照片上不可避免会有大量钢管等遮挡,后期处理需要大量PS修图工作,严重破坏文物纹理的真实性。本次作业采用大疆S1000多旋翼无人机,如图2所示。通过三轴自稳定云台(可始终保持相机镜头正射古塔立面)搭载Canon 5D Mark ii单反相机,利用2.4 G全高清数字图传将航拍的视频画面实时传回到地面显示屏,飞手根据视频引导无人机的飞行路径,当其到达预定位置时,保持处于自动悬停状态,并切换成拍照模式,云台手利用遥控控制云台进行拍摄,从保俶塔8个立面共拍摄局部图像约150幅。拍摄基本参数如下:

Figure 2. UAV shooting system
1)拍摄重叠度(纵横向):> 30%。
2)分辨率:单张相片相幅设置到相机的最大分辨率。
3)拍摄分割:以古塔单层为单位,分层拍摄,分割点在古塔形状变化趋缓的地方,同一层按设定分辨率拍摄,单张照片拍摄尽量选择正对目标部分的地方进行拍摄。
4)拍摄时间选择:宜选择多云无风天气或者分时段拍摄,保证拍摄时塔身各部分光线较均匀,没有阴影,图像亮度较好且变化不大,最大程度保证纹理的真实性。
1.1 扫描对象与点云数据获取
1.2 利用无人机拍摄塔体立面纹理数据
-
通过人工设置标志点或者选择特征明显的标志点,在相邻两个测站共同观测3个或3个以上不共线的标志点进行点云拼接。这种方法的原理简单,精度高,拼接结果可靠[6]。
本文拼接思路如下:先对地面上观测的8站点云数据(这8站点云数据覆盖面大、精度高)进行精确拼接,作为点云拼接的基准;再对各层观测平台上所包含的测站数据进行拼接(由下至上,以每层为单位,利用特征点经过连续拼接把塔体拼合在一起形成整体点云模型)。此时,整个点云模型是完整的,并且已经转换到相应的坐标系下。一般情况下,相邻测站点云数据拼接精度控制在3 mm以内。

Figure 3. The sixth layer of point cloud model spliced up

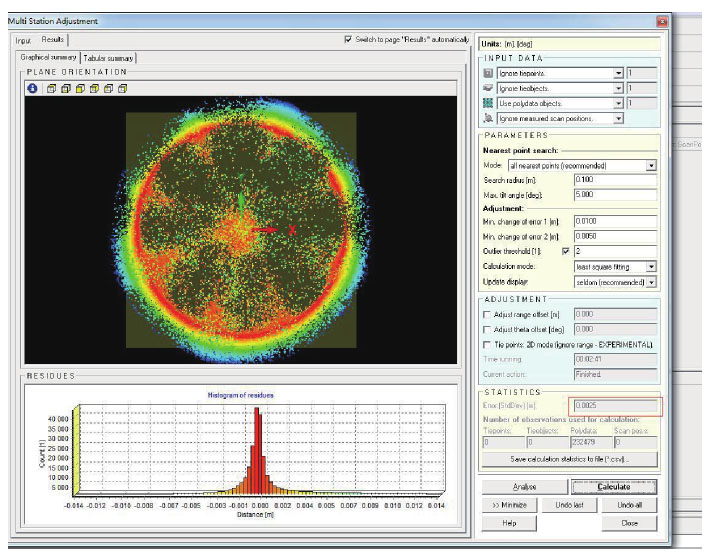
Figure 4. Results of multi-site adjustment
在塔体整体拼接完成的基础上,采用多站点配准技术对拼接好的整体点云再进行联合平差,整体误差为2.5 mm。整体平差完成后,采用在平视、侧视及俯视三个方向上截取剖面点的方法,验证整体点云数据重叠部分拼接后的吻合情况,有没有分层,并可通过量算临近两点的空间距离进行整体平差后的点位误差,如图5所示。

Figure 5. The point cloud quality
-
通过激光雷达得到一系列规则排序的点的三维坐标,但离散点并不能有效地再现实物的表面,需要重构出具有完整结构和精确空间位置信息的实体模型。
针对点云数据构建模型有两种方法:一种是不规则三角网格法,其特点是自动化程度比较高,但是模型精度与点云数据完整与否有关,若数据不全,细部结构扫描分辨率太低,都会直接影响模型显示效果;一种是参数化建模方法,其特点是自动化程度及建模效率较低,适用于点云数据不是太完整,较难使用补洞技术进行修补的情况。
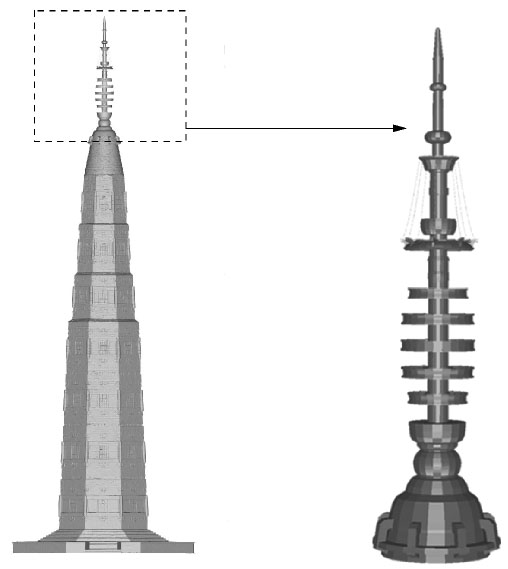
一般而言,古塔较高,塔基及塔身数据获取相对较完整,而塔刹只能获取大概的轮廓信息。故本文对塔基、塔身采用上文提到的第一种方法进行建模,对塔刹采用第二种方法建模。
-
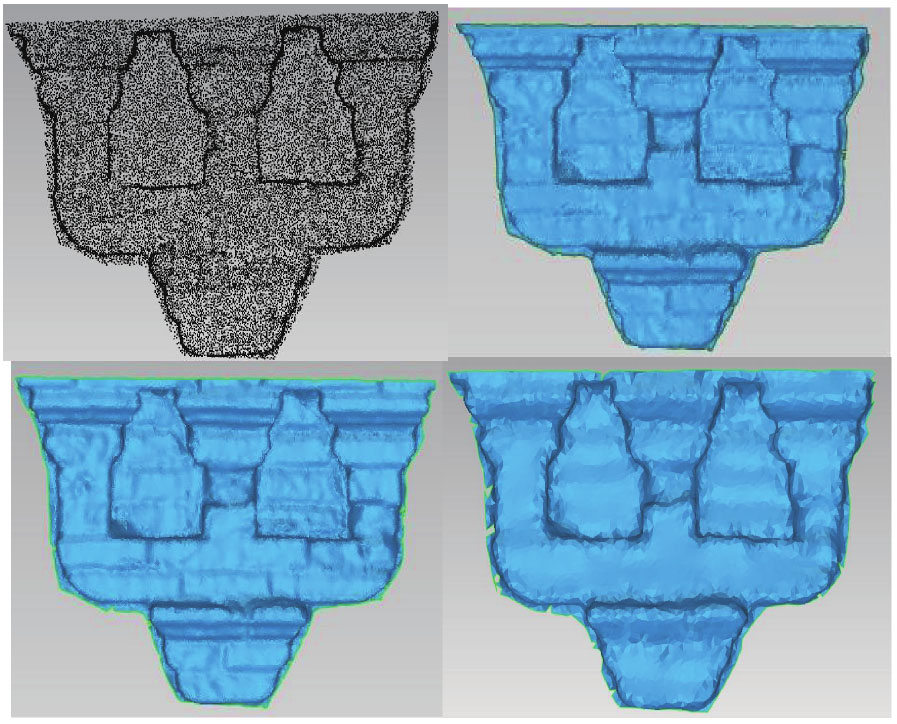
经过去噪后的点云数据可以用于构造不规则三角网模型。由于所获取保俶塔的点云数据密度高、数据量大,存在较多冗余,因此在构网前需要对点云进行重采样。本文按照设定的阈值进行等间隔重采样,设置采样间隔分别为5 mm、8 mm、10 mm,并选取第六层的西面数据构建不规则三角网,经比较分析,5 mm和8 mm分辨率点云数据可以表现出斗拱、砖体等复杂结构的细节,而10 mm分辨率的点云数据构建模型后表现圆滑,已经无法精细表现出砖体的特征情况。最终根据实验结果,我们设定重采样阈值为8 mm。
-
由于点云数据建成的三角网数据量巨大,采用分层分面(分割应按照照片的划分进行区域分割,使分割模型与照片一一对应且有一定程度的重叠)单独建立三角网的方法,对塔体逐层分别构建三角网。在点云采集过程中,由于钢管遮挡较为严重,有些“死角”是无法获取点云信息的,这会形成数据空洞。在建模过程中需要对这些数据空洞进行“补洞”,使目标物的三维模型得到完整表达,如图7所示的是塔体第六层三角网模型。

Figure 6. The bucket model (from left to right, original point cloud data, 5mm triangulation model, 8mm triangular network model, 1cm triangular network model)

Figure 7. Sixth floor tower triangulation model
-
将塔刹点云数据导入支持“点云”功能的第三方建模软件3d-max2015中,通过多边形、线、面、圆柱等几何对象的创建命令利用挤压、焊接、合并等功能根据点云上拟合成型,快速构建塔刹三维线框模型和实体。

Figure 8. Overall model and wireframe model of Baochu tower
2.1 数据预处理
2.2 构建三维模型
2.2.1 重采样
2.2.2 塔基、塔身模型构建
2.2.3 塔刹模型构建
-
立面正射影像图是一种既具有影像特征同时又具有线划地图数学、几何与制图特征的图种。由于其包含的信息丰富、直观性强,具有可量测性,因而受到文保工作者的广泛关注。
比较项目 立面正射影像 一般照片 投影方式 正射投影 中心投影 比例尺 固定 不固定 倾斜误差 无 有 投影差 不存在 有 影像拼接 容易,精确 困难,粗略 与矢量叠加 能 不能 Table 1.
Vertical orthophotos and ordinary photos of the difference -
点云与影像配准就是将二维的纹理信息按照一定规则正确地映射到三维点云。由于点云数据和光学影像对目标的表现形式和特点有很大差异,因此,两类数据的配准不能完全使用普通图像配准方法。本文利用周俊召提出的基于罗德里格矩阵的点云与影像配准方法,通过4对同名点直接对7参数进行解算,使得计算简便且速度快。同时根据应用需要增加基于OpenGL三维可视化投影矩阵变换的人机交互微调改正方法,使二维影像与三维点云模型达到最佳配准效果[7]。
-
在已制作的按照片拍摄范围划分点云的基础上,结合无人机获取的高分辨率数码照片我们就可以进行纹理映射生成单块的彩色点云。
首先是对点云进行合理的切割,我们按照每张照片的范围将点云进行分割,在贴图之前,先看一下所有的照片,尽量将点云切割在特征不太明显的地方,这样就减轻了贴图中的接边而导致后面纹理错误的问题。
选择至少4对同名点对点云运用上文提到的原理进行纹理映射,从而生成彩色点云,从贴图效果上来看,由于前期进行了点云的分割,对于古塔来说,它的细节表现较好
在选取同名点时,要注意同名点的层次分布;应让同名点比较均匀的分布,并且使同名点在影像上覆盖范围尽可能大,使同名点与相机中心距离越大越好。
依照上述步骤生成古塔某一外立面完整彩色点云后,数码照片与原始点云之间就存在一个坐标对应的关系,将生成的三角网模型导入就可以进行纹理映射从而生成单块彩色三角网模型。

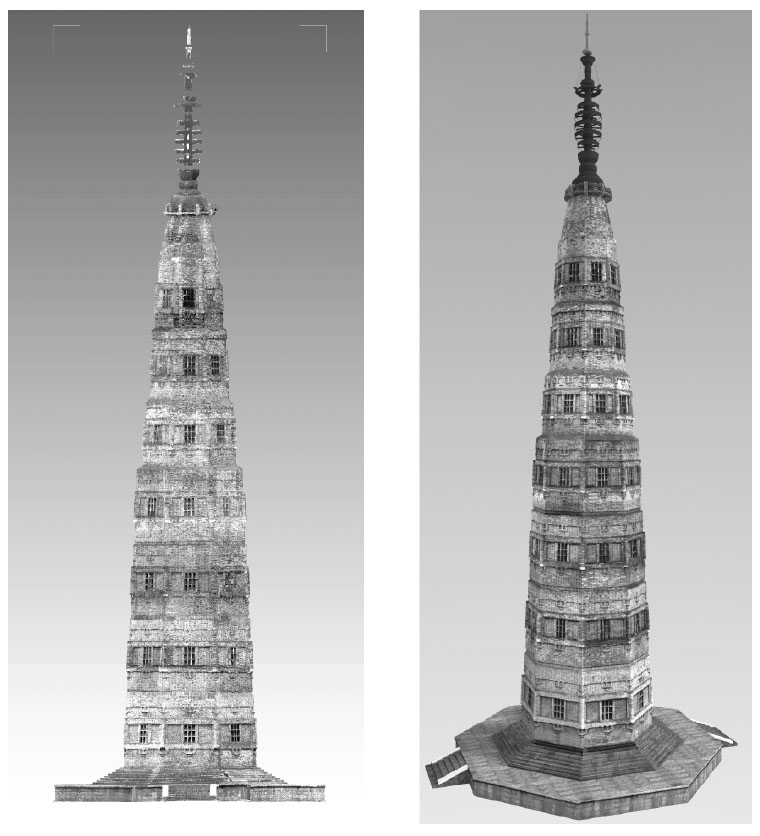
Figure 9. Integral color point cloud and overall color simulation model
-
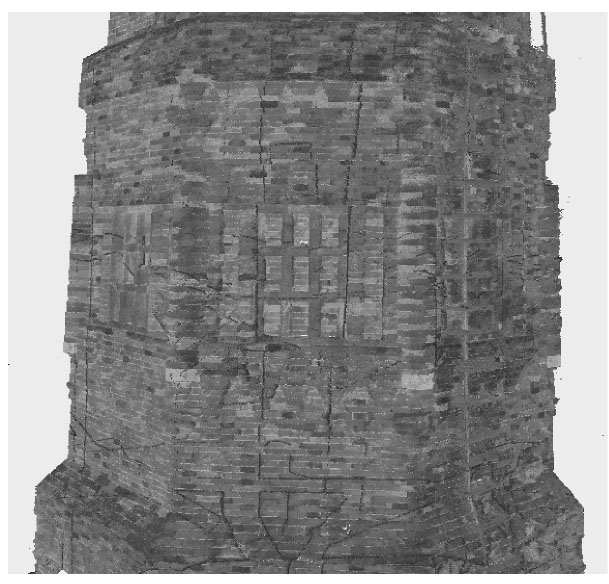
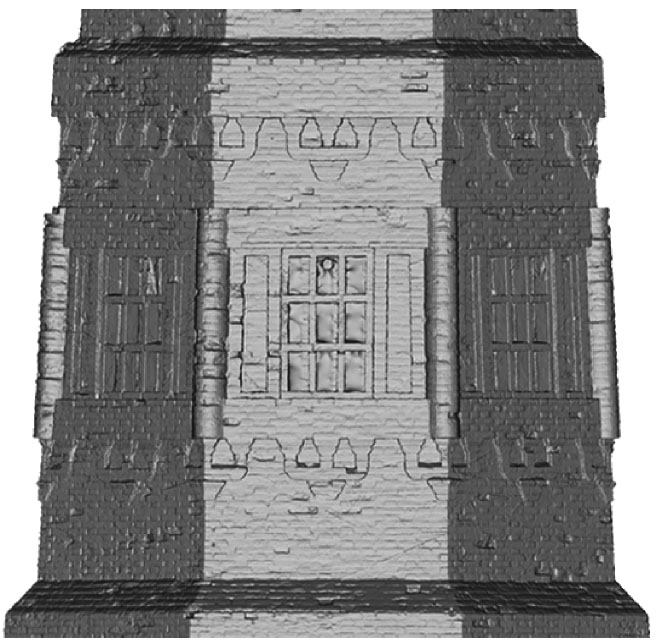
单块彩色三角网模型生成后,将各块彩色三角网模型合并到一起显示,将多张正射影像按照相同的比例尺分块输出,在Photoshop中将它们按照分割的顺序逐个拼接起来构成整张彩色正射影像图,并对不同照片之间的接缝处出现的接缝和棱角做适当修复。在CAD中定比例后,正射影像即同时拥有精细的影像和准确的尺寸,能够忠实的反应古塔的原貌。图是西面正射影像。
-
按照本文流程制作古塔立面正射影像图,我们通过两种方法来统计其质量及精度。

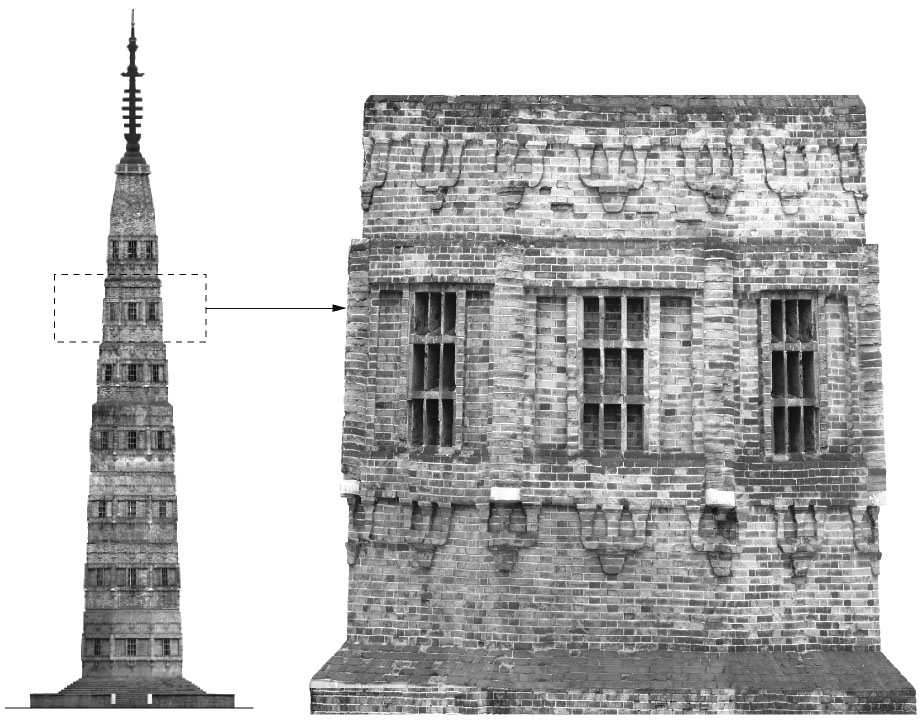
Figure 10. Orthorectic image of west façade and the sixth story of the west
一是视觉效果评价,即通过目视查看影像是否存在模糊、错位、扭曲、重影、变形、拉花、划痕等问题;是否清晰,色调(色彩)是否均衡一致,无明显的像片拼接痕迹。
二是几何质量评价,即通过全站仪来统计精度情况,由于立面正射影像是将古塔的每个立面彩色模型投影到平行于计算机屏幕的主平面上,不同于航空正射影像,我们无法直接通过测量仪器来检查其绝对位置的误差。在此我们具体做法是:利用全站仪测量保俶塔西南立面上若干特征的三维坐标,再计算特征点间在计算机屏幕的主平面上正射投影距离d1,另外在正射影像上量算相同特征点的距离d2,最后计算d1和d2的差Δd。
由表2统计数据可知,差值最大为0.018 m,最小为0.005 m,一般在以0.01 m内,均方差为0.009 m,该方法所生成的正射影像精度可满足工程要求。
序号 d1/m d2/m Δd/m 序号 d1/m d2/m Δd/m 1 4.778 4.789 -0.011 10 0.954 0.961 -0.007 2 2.641 2.632 0.009 11 1.093 1.084 0.009 3 2.347 2.336 0.011 12 1.105 1.095 0.010 4 2.312 2.317 -0.005 13 1.357 1.351 0.006 5 1.625 1.634 -0.009 14 1.642 1.647 -0.005 6 1.579 1.572 0.007 15 1.724 1.731 -0.007 7 1.283 1.293 -0.010 16 0.389 0.384 0.005 8 0.701 0.693 0.008 17 0.489 0.479 0.010 9 1.271 1.289 -0.018 18 0.386 0.403 -0.017 Table 2.
Geometric quality evaluation
3.1 点云与影像配准原理
3.2 彩色仿真模型生成
3.3 立面正射影像输出
3.4 质量及精度检查
-
使用地面激光雷达和无人机技术制作大型古塔立面正射影像图是一种非接触测量的手段,不会对文物造成损伤。通过点云模型纠正了照片中心投影所引起的变形,精度满足工程要求;同时利用无人机立面拍摄系统采集古塔立面纹理,有效克服了脚手架遮挡等问题,不仅大大减少了数据内业处理的时间,而且最大程度保证了古塔纹理的真实性。在此基础上,古建筑设计和保护人员可以精确对窗户、斗拱等构件进行测量,借助CAD绘图软件便可制作出用于施工的CAD数据图及塔体病害分布图。因此本研究结果对大型古塔数字化测绘有重要的参考价值,具有一定的现实意义和应用价值。
经过实践,下一步需要研究的问题是:脚手架遮挡产生的大量点云噪声自动去除算法、建立大型古塔三维模型变形监测的研究理论以及监测数据与模型精度的评价体系。

 DownLoad:
DownLoad: